sma马达、摄像模组及电子设备
技术领域
1.本技术涉及摄像技术领域,尤其涉及一种sma马达、摄像模组及电子设备。
背景技术:
2.随着智能终端拍照功能的日趋强大,光学防抖(optical image stabilizer,ois)逐渐成为了终端的主要卖点之一。目前,部分终端中的摄像模组采用形状记忆合金(shape memory alloys,sma)马达,通过使用电流控制sma线的伸缩,来实现光学防抖功能。由于sma线占用的体积较小,能够有效地降低摄像模组的体积,因此获得了广泛的研究。
3.但是,sma马达实现防抖的过程中,sma马达中的固定部与相对固定部平移的活动部之间存在滑动摩擦,摄像模组处于不同位姿时,固定部与活动部之间的摩擦力不同,导致摄像模组的驱动算法难以控制。
技术实现要素:
4.本技术提供了一种sma马达、摄像模组及包括此摄像模组的电子设备。摄像模组采用sma马达防抖,sma马达中的活动部与固定部之间不存在滑动摩擦力,降低了摄像模组的驱动算法。
5.第一方面,本技术提供一种摄像模组。摄像模组包括sma马达和镜头。镜头的主要部分位于sma马达的内侧,镜头的部分结构伸出至sma马达的外侧。sma马达可以用于实现摄像模组的防抖。sma马达也可以用于实现摄像模组的调焦,本技术对此并不限定。
6.所述sma马达包括固定部、活动部、多根sma线和多根悬线。所述固定部位于所述镜头的出光侧。活动部位于固定部的上方。所述镜头安装于所述活动部的内侧。所述多根sma线连接在所述固定部与所述活动部之间。所述多根sma线通电时产生收缩,带动所述活动部和所述镜头相对所述固定部移动。sma线采用形状记忆合金(shape memory alloys,sma)材料,例如镍钛合金材料。形状记忆合金是一类具有形状记忆效应金属的总称。本领域的技术人员能够根据实际需求选择sma线的材质,本技术对此并不限定。
7.在本技术中,由于sma线通电时产生收缩,会对活动部产生对应的拉力,因此摄像模组可以通过控制多根sma线的电信号,使多根sma对活动部施加的合力朝向预期方向,从而驱动包括镜头的活动部向预期的方向和位置移动,使得摄像模组能够通过平移镜头实现防抖。示例性的,sma线用于驱动活动部和镜头相对固定部,沿垂直于镜头的光轴的平面移动。
8.此外,相较于传统的防抖马达(也即音圈马达),sma马达采用线材驱动方式、而非磁场驱动方式,sma马达的结构更为精简,有助于摄像模组的小型化,并且可以降低摄像模组对周边环境产生的磁干扰。
9.其中,传统技术中,sma马达包括固定部、活动部和位于固定部与活动部之间的支撑件。支撑件用于支撑活动部。活动部相对固定部沿垂直于镜头的光轴的平面移动时,活动部与支撑件之间滑动连接,此时活动部与支撑件的滑动面存在摩擦力,此摩擦力干扰活动
部的移动。基于摩擦力与支撑件承受的压力有关,当支撑件承受的压力不同时,支撑件与活动部之间的摩擦力不同,因此电子设备处于不同姿势,活动部的重力方向与滑动面之间形成不同的角度,使得滑动面承受的压力不同,导致活动部与支撑件之间的滑动摩擦力不同,干扰摄像模组防抖的准确性。
10.而在本技术中,所述多根悬线连接在所述固定部与所述活动部之间,且分布于所述活动部的周边。所述多根悬线支撑所述活动部,使所述活动部悬空于所述固定部的上方。示例性的,每根悬线的一端笔直地固定于固定部,另一端笔直地固定于活动部。可以理解的,多根悬线将活动部悬空地支撑于固定部的上方,活动部与固定部之间无需额外设置支撑件,从而使得活动部与固定部间隔设置。其中,多根悬线对称地设于活动部的周缘,以保证多根悬线稳固地支撑活动部。
11.在本技术中,摄像模组设有多根支撑活动部的悬线,以使活动部悬空地位于固定部的上方,固定部与活动部之间无需额外设置用于支撑活动部的支撑件,固定部与活动部之间间隔设置,使得当活动部相对固定部移动时,活动部与固定部之间不存在滑动摩擦力,避免了电子设备处于不同位姿时,活动部与固定部之间的摩擦力不同而对摄像模组的驱动算法造成的难度。
12.在一些可能的实现方式中,所述活动部包括镜头载体和多个上簧片。所述镜头固定于所述镜头载体的内侧。所述多个上簧片分布于所述镜头载体的周边,且与所述多根悬线一一对应。各所述上簧片的一端固定于所述镜头载体的顶侧,另一端固定于对应的所述悬线。
13.在本技术中,支撑活动部的多根悬线与上簧片固定连接,上簧片具有弹性能够为活动部的移动提供缓冲力,也能够带动活动部与镜头移回至初始位置,使得活动部中的活动板无需额外设置与固定部连接的弹簧臂,避免了设置弹簧臂的工艺难度,从而降低了摄像模组的成本。可以理解的,在本技术中,多根悬线与上簧片固定连接,解决了活动部晃动异常与姿势差的问题。
14.示例性的,多个上簧片对称排布,且多根悬线对称排布。上簧片与悬线的数量均为四个,四个上簧片与四根悬线一一对应。四个簧片与四根悬线均在x轴方向上均对称排布,且在y轴方向上均对称排布。x轴方向与y轴方向均垂直于z轴方向,且均与z轴方向相交。其中,z轴方向为镜头的光轴。
15.每根悬线的长度及延伸方向均相同,以使每根悬线受到相同作用力时倾斜的角度相同,避免每根悬线倾斜角度不同,而导致镜头倾斜,从而提高了摄像模组防抖的准确性。
16.在本技术中,支撑活动部的多根悬线对称排布,摄像模组处于不同位姿时,每根悬线的对活动部的作用力相同,有利于降低摄像模组驱动算法的控制难度。其中,多个上簧片对称排布,每个上簧片对每根悬线产生的作用力相同,使得每根悬线受力均衡。
17.在一些可能的实现方式中,上簧片包括依次连接的第一平直部、弯折部及第二平直部。第一平直部固定于镜头载体,第二平直部固定于基座。弯折部位于镜头载体与基座形成的间隙。示例性的,第一平直部、弯折部及第二平直部一体成型,节省了上簧片的组装时间,并且避免上簧片组装过程中变形。
18.在本技术中,上簧片固定于镜头载体的一端,与固定于基座的另一端均为平直部,使得上簧片的两端处于同一水平面,避免上簧片中弯折部发生形变过程中带动第一平直部
弯曲而造成镜头的倾斜,从而提高摄像模组调焦的准确性。
19.在一些可能的实现方式中,所述固定部包括防抖引入线和防抖引出线。所述防抖引入线电性连接所述sma线的一端,防抖引出线电性连接sma线的另一端。其中,连接可以为直接连接,也可以为间接连接,本技术对此并不限定。在本技术中,防抖引入线和防抖引出线分别与sma线电性连接,以形成闭环回路。可以理解的,防抖引入线和防抖引出线能够分别看作sma线的正负极。
20.在一些可能的实现方式中,所述sma马达还包括副悬线。所述副悬线的一端固定于所述固定部,并电性连接所述防抖引出线,所述副悬线的另一端固定于所述活动部,并电性连接所述sma线的另一端。示例性的,副悬线的一端笔直地固定于固定部,另一端笔直地固定于活动部。其中,副悬线采用导电材料,相当于导线。
21.在本技术中,副悬线的一端笔直地固定于固定部,另一端笔直地固定于活动部,副悬线不仅电性连接在防抖引入线与防抖引出线,而且能够支撑活动部,增加活动部悬空地置于固定部上方的可靠性。在其他实施例中,副悬线也能够为对固定部没有支撑力的导线,仅用于实现电性连接,本技术对此并不限定。
22.在一些可能的实现方式中,所述防抖引入线的数量为多条。多条所述防抖引入线一一对应地电性连接多根所述sma线。多条防抖引入线一一对应地与多根sma线电性连接,多根sma线并联设置,通过每根sma线的电流大小能够不同,使得多根sma线能够带动活动板沿不同方向移动。
23.所述活动部包括面向所述固定部的活动板。多根所述sma线固定于所述活动板。所述sma马达还包括防抖连接线。所述防抖连接线连接在所述活动板与所述副悬线之间,且所述活动板采用导电材料,以使所述防抖连接线与每根所述sma线均电性连接。可以理解的,每根sma线均与导电的活动板电性连接,以使多根sma线通过活动板分别与副悬线电性连接。
24.在本技术中,多条防抖引入线分别与多根sma线电性连接,多根sma线固定于采用导电材料的活动板,活动板通过防抖连接线与副悬线电性连接防抖引出线,以实现了sma马达中防抖线路的闭环回路。其中,多条防抖引入线并联设置,最终通过活动板和副悬线与防抖引出线串联,节省了防抖引出线的数量,有利于简化sma线的线路设计。
25.在一些可能的实现方式中,摄像模组还包括与副悬线对称排布的平衡悬线。平衡悬线与副悬线分别位于活动部相对设置的两个对角。平衡悬线与副悬线的延伸方向及长度相同,活动部在sma线的作用力下移动时,平衡悬线与副悬线受力相同。
26.在本技术中,防抖引出线的数量为一个,仅需一个副悬线实现防抖引入线与防抖引出线的电性连接。sma马达在实现防抖的过程中,活动部与副悬线之间产生作用力,此时平衡悬线与副悬线对称排布,用于平衡副悬线对活动部的作用力,使得活动部的受力均衡,从而有利于摄像模组的防抖。
27.在一些可能的实现方式中,所述固定部包括底板和安装于底板的固定板。所述固定板面向所述活动板,并与所述活动板间隔设置。所述sma线的一端固定于所述固定板。所述防抖引入线设于所述固定板,所述防抖引出线设于所述底板。所述副悬线的一端固定于所述底板,另一端固定于所述活动部。在本技术中,防抖引入线与防抖引出线分别位于固定板相背设置的两侧,避免固定板线路较多而增加线路设计的困难。
28.可以理解的,活动板采用导电材料,多根sma线均与活动板电性连接,且活动板通过防抖连接线及副悬线,与位于底板的防抖引出线电性连接,使得多根sma线中的电信号汇聚,并通过防抖引出线引出,以实现防抖的闭环回路。防抖引入线、多根sma线、活动板、防抖连接线、副悬线及防抖引出线形成闭环回路。
29.在一些可能的实现方式中,所述摄像模组还包括电路板及安装于所述电路板的图像传感器。所述电路板位于所述sma马达的下方。所述防抖引入线与所述防抖引出线均自所述固定部引出,并与所述电路板电性连接。
30.在本技术中,防抖引入线和防抖引出线自底板引出,并与电路板电性连接,控制输入sma线的电信号,以控制活动板的移动量补偿光路的偏移,实现摄像模组防抖的线路控制。与此同时,防抖引入线和防抖引出线自底板引出,并与电路板电性连接,使得摄像模组仅通过单个电路板既能实现摄像模组内部的线路与外部的线路电性连接。
31.在一些可能的实现方式中,所述摄像模组还包括电路板、图像传感器、底座及滤光片。所述电路板、所述图像传感器、所述底座及所述滤光片均位于所述sma马达的下方。所述图像传感器安装于所述电路板,所述底座固定于所述电路板的上方。所述滤光片固定于所述底座,并与所述图像传感器相对设置。
32.在此实施例中,电路板和图像传感器位于sma马达的下方,sma马达驱动镜头相对图像传感器,沿垂直于镜头的光轴的平面移动。在其他实施例中,sma马达也能够驱动镜头与图像传感器一起,沿垂直于镜头的光轴的平面移动;或者,sma马达驱动图像传感器相对镜头,沿垂直于镜头的光轴的平面移动。
33.其中,外界穿过镜头的光线经过滤光片后照射于图像传感器上。滤光片位于图像传感器与镜头之间,能够过滤穿过镜头光线中的杂光,使得摄像模组拍摄的照片更加真实,从而提高摄像模组的质量。
34.在一些可能的实现方式中,所述活动部还包括基座、第一驱动件、第二驱动件和下簧片。所述镜头位于所述基座的内侧,所述第一驱动件固定于所述基座。所述第二驱动件位于所述第一驱动件与所述镜头之间,且相对所述镜头固定。所述第一驱动件与所述第二驱动件相对设置,当所述第一驱动件或所述第二驱动件响应电信号时,所述第一驱动件与所述第二驱动件之间形成磁场效应,驱动所述镜头沿所述镜头的光轴方向移动。所述下簧片连接在所述基座与所述镜头之间,并位于所述第二驱动件的下方。镜头载体相对基座悬空设置,下簧片支撑镜头载体及固定于镜头载体的第二驱动件和镜头。
35.在本技术中,当第一驱动件或第二驱动件响应电信号时,第二驱动件与第一驱动件之间形成磁场效应,驱动镜头沿垂直于镜头的光轴方向移动,以改变镜头与图像传感器之间的距离,从而实现摄像模组的调焦。
36.在一些可能的实现方式中,第一驱动件包括磁性体,第二驱动件包括线圈。在本技术中,基于线圈的重量较小(也小于磁性体),第一驱动件、镜头载体及镜头整体的重量较小,使得下簧片的负载较小,从而有利于降低摄像模组的调焦功耗。在其他实施例中,第一驱动件也可以包括线圈,第二驱动件包括磁性体,本技术对此并不限定。
37.示例性的,磁性体与线圈的数量均为两个。两个磁性体分别固定于基座相背设置的两侧,两个线圈分别固定于镜头载体相背设置的两侧。两个磁性体与两个线圈一一对应。当线圈通电后,线圈与对应的磁性体之间产生电磁力,驱动线圈带动镜头沿镜头的光轴方
向移动。
38.在一些可能的实现方式中,所述活动部还包括连接片和多条调焦引线。连接片用于实现第一驱动件或第二驱动件电信号的传输。连接片可以是电路板、也可以是设有导线的结构件,本技术对此并不限定。当第一驱动件或第二驱动件响应电信号时,第二驱动件与第一驱动件之间形成磁场效应,驱动镜头相对底板移动。
39.所述连接片固定于所述基座的侧边,所述第一驱动件或所述第二驱动件与所述连接片电性连接。所述多条调焦引线设于所述固定部,并一一对应地连接所述多根悬线。所述多根悬线和多个上簧片均采用导电材料,所述多条调焦引线分别通过所述多根悬线与所述连接片电性。
40.在本技术中,sma马达中的连接片通过多个上簧片、多根悬线及多条调焦引线与电路板电性连接,实现调焦线路的闭环回路,提高了摄像模组的调焦速度。可以理解的,在本技术中,sma马达为闭环马达(close loop),通过多条调焦引线、多根悬线及多个上簧片与连接片电性连接,实现了信号的控制、响应、反馈与控制,生成了反馈信号,减少了镜头来回移动的次数,从而提高了摄像模组的调焦速度及降低了摄像模组的功耗。
41.在一些可能的实现方式中,活动部还包括位置检测器。位置检测器位于连接片的内侧。位置检测器用于检测镜头相对固定部位置。示例性的,位置检测器通过检测磁场的变化来进行位置检测。
42.示例性的,位置检测器和第二驱动件(线圈)均通过连接片与外部器件电连接,以简化调焦组件的电路设计。示例性的,位置检测器嵌设于基座,位置检测器与基座的空间复用,使得摄像模组更小型化。在其他一些实施例中,位置检测器也能够设于其他位置,本技术并不限定。
43.在本实施例中,位置检测器与驱动芯片(driver ic)采用一体化芯片,通过共用电源与通讯的方式,减小了第二驱动件(线圈)与位置检测器引脚的数量。也即,位置检测器采用检测、驱动、控制一体化芯片(all in one)。其中,本领域技术人员能够根据实际需求对位置检测器进行设计,本技术并不限制位置检测器的具体驱动方式及其与第二驱动件(线圈)电气连接的方式等。
44.在一些可能的实现方式中,所述多根悬线包括第一悬线、第二悬线、第三悬线和第四悬线。所述第一悬线与所述第二悬线在x轴方向上对称排布,所述第三悬线与所述第四悬线在x轴方向上对称排布,所述第一悬线与所述第四悬线在y轴方向上对称排布,所述第二悬线与所述第三悬线在y轴方向上对称排布。其中,所述x轴方向与所述y轴方向垂直且相交。
45.在本技术中,四根悬线分别位于基座的四个对角位置,活动部相对固定部移动过程中,悬线倾斜时的避让空间较多,有利于摄像模组的小型化。
46.在一些可能的实现方式中,所述第一悬线与所述第二悬线位于所述连接片的同一侧。所述第三悬线与所述第四悬线位于所述连接片的另一侧,且相对所述第一悬线与所述第二悬线远离所述连接片。所述摄像模组还包括两条闭环引线,所述两条闭环引线嵌设于所述基座。一条闭环引线连接在所述第三悬线与所述连接片之间,另一条所述闭环引线连接在所述第四悬线与所述连接片之间。其中,每根悬线采用导电材料,使得每根悬线与对应的调焦引线电性连接。多个上簧片采用导电材料,并与连接片电性连接。
47.在本技术中,sma马达中的连接片通过多个上簧片、多根悬线及多条调焦引线与电路板电性连接,实现调焦线路的闭环回路,提高了摄像模组的调焦速度。可以理解的,在本技术中,sma马达为闭环马达(close loop),通过多条调焦引线、多根悬线及多个上簧片与连接片电性连接,实现了信号的控制、响应、反馈与控制,生成了反馈信号,减少了镜头来回移动的次数,从而提高了摄像模组的调焦速度及降低了摄像模组的功耗。
48.在一些可能的实现方式中,底板设有相背设置的第一避让口和第二避让口。防抖引入线和防抖引出线自第一避让口引出,多条调焦引线自第二避让口引出。其中,多条调焦引线设于底板,且一一对应地接触多根悬线。
49.在一些可能的实现方式中,位于底板上的多条调焦引线和防抖引出线通过刻蚀、半导体沉积工艺,嵌设于底板。多条调焦引线和防抖引出线也能够形成为柔性电路板,通过粘接的方式固定于底板,本技术并不限定多条调焦引线和防抖引出线设于底板的方式。
50.在本技术中,悬线的一端固定于底板,多条调焦引线设于底板,悬线能够直接与位于底板的调焦引线接触实现电连接,简化了悬线与调焦引线电连接的难度。并且,多条调焦引线集成于底板,避免了引线杂乱而影响摄摄像模组各部件的排布。
51.在一些可能的实现方式中,所述活动部包括活动板、电路板和图像传感器。所述活动板、所述电路板和所述图像传感器均位于所述镜头的出光侧。所述活动板面向所述固定部,并与所述固定部间隔设置。所述电路板固定于所述活动板的上方,所述图像传感器安装于所述电路板。所述sma线固定连接所述活动板。
52.在本技术中,电路板、图像传感器和基座均相对活动板固定连接,且镜头连接基座,sma线响应电信号时带动图像传感器及镜头一起,相对固定部沿垂直于镜头的光轴的平面移动,此时穿过镜头的光线投射于图像传感器上的位置不变,有利于提高摄像模组成像的解析度,从而提高摄像模组成像的清晰度。与此同时,穿过镜头的光线投射图像传感器上的位置固定,使得图像传感器设置较小的感光面即可满足成像需求,有利于减小图像传感器的体积。
53.在一些可能的实现方式中,所述固定部包括底板和固定于底板上的固定板。所述固定板与所述活动板间隔设置,所述sma线的一端固定连接所述固定板。
54.所述摄像模组还包括外壳、软硬结合板和软性电路板。所述外壳固定于所述底板的周缘,且所述活动部收容于所述外壳的内侧。所述软硬结合板自所述底板引出至所述外壳的外侧,并与所述sma线电性连接。所述软性电路板电性连接所述软硬结合板与所述电路板,且所述软性电路板设有弯折余量。
55.在本技术中,sma马达内部的走线一部分通过软性电路板引出,另一部分通过软硬结合板引出。例如,sma马达内实现调焦的走线通过软性电路板引出,sma马达内实现防抖的走线通过软硬结合板引出。
56.在其他实施例中,摄像模组内部的走线也能够仅由软硬结合板或软性电路板引出,本技术对此并不限定。例如,摄像模组的防抖信号与调焦信号集成于软硬结合板;或者,活动部不包括调焦组件,摄像模组仅能够实现防抖,此时防抖信号通过软硬结合板传输至摄像模组的外部。
57.在一些可能的实现方式中,所述软性电路板自所述电路板引出至所述外壳的外侧。所述软性电路板包括依次连接的第一弯折区、第一平展区和第二弯折区。所述第一弯折
区的一端固定连接所述电路板,另一端固定连接所述第一平展区的第一侧边。所述第二弯折区的一端固定连接所述第一平展区的第二侧边,另一端固接于所述软硬结合板。其中,所述第一侧边与所述第二侧边相邻设置,所述第一弯折区的延伸方向包括至少两个方向,所述第二弯折区的延伸方向包括至少两个方向。
58.其中,第一弯折区的延伸方向包括至少两个方向。第一弯折区的延伸方向为第一弯折区中走线排布的方向。第一弯折区的延伸路程大于,第一弯折区延伸方向相背设置的两端之间的距离。第二弯折区的延伸方向包括至少两个方向。第二弯折区的延伸方向为第二弯折区中走线排布的方向。第二弯折区的延伸路程大于,第二弯折区延伸方向相背设置的两端之间的距离。示例性的,第一平展区的延伸方向不变。当摄像模组处于不工作状态时,第一弯折区与第二弯折区均呈弯曲状态,第一平展区呈展平状态。
59.在本技术中,软性电路板通过设置第一弯折区与第二弯折区,使得软性电路板具有形变余量。在其他实施例中,软性电路板也能够仅通过设置一个弯折区形成形变余量。或者,第一平展区的延伸方向也能够包括至少两个方向,第一弯折区、第一平展区和第二弯折区均设有形变余量。本领域技术人员能够根据摄像模组的实际需求,对软性电路板设计形变余量,本技术对此并不限定。
60.在一些可能的实现方式中,所述软硬结合板包括第三弯折区和第二平展区。所述第三弯折区的一端连接所述底板,且所述第三弯折区的延伸方向包括至少两个方向。第三弯折区的延伸路程大于,第三弯折区延伸方向相背设置的两端之间的距离。当摄像模组处于不工作状态时,第三弯折区呈弯曲状态。所述第二平展区连接于所述第三弯折区远离所述底板的一端,且所述软性电路板固定于所述第二平展区。
61.在本技术中,软硬结合板也设有第三弯折区,使得软硬结合板的长度能够发生变化,避免了摄像模组在防抖过程中软硬结合板牵扯活动部,而干扰活动部的移动,从而有利于摄像模组的防抖。其中,第三弯折区位于软硬结合板中的软板部。第二平展区可以位于软硬结合板中的软板部,也可以位于软硬结合板中的硬板部,本技术对此并不限定。
62.在一些可能的实现方式中,所述软性电路板的一端固定于所述电路板的下方,另一端固定于所述底板,且所述软性电路板位于所述外壳的内侧。软性电路板设有形变余量。其中,软性电路板设有形变余量,以使软性电路板的长度能够发生变化。
63.在本技术中,软性电路板位于外壳的内部,摄像模组内部的电信号均通过硬性电路板与电子设备的其他元器件电性连接,避免外壳的外侧设用于传输活动部中电信号的柔性电路板,使得电子设备内部无需设置供柔性电路板随活动部移动时的形变空间,减小摄像模组占用电子设备的内部空间,有利于电子设备的小型化。
64.其中,sma线通电收缩时带动活动部中的电路板移动时,电路板对软性电路板的作用力牵引软性电路板移动,软性电路板中的形变余量能够吸收此作用力产生的位移量,避免了固定于软硬结合板一端的软性电路板牵扯电路板,而干扰活动部的移动,从而有利于摄像模组的防抖。
65.电路板可以是一个硬性电路板,且设有电性连接软性电路板的走线,此硬性电路板可以通过各种方法与活动板固定连接。与此同时,电路板上安装有各种元器件,例如图像传感器,通过工艺与软性电路板电性连接,以使图像传感器中获取的信号通过软性电路板及软硬结合板传输至其他元器件。在其他一些实施例中,电路板也可以通过在基板上放置
柔板和元器件,柔板通过工艺,例如引线焊接(wire bonding)实现与图像传感器的电信号连接,通过软性电路板引出信号线。
66.本领域技术人员能够根据实际需求对电路板、软硬结合板及软性电路板进行设计,本技术并不限制电路板、软硬结合板及软性电路板的具体结构及形成工艺等。其中,软性电路板与电路板能够为一体的结构,也可以与软性电路板为两个不同的结构,本技术对此并不限定。
67.在一些可能的实现方式中,所述sma马达设有贯穿所述固定板和所述活动板的避让空间,所述软性电路板收容于所述避让空间。
68.在本技术中,sma马达设有贯穿固定板与活动板的避让空间,避让空间不仅供柔性电路板穿过固定板与活动板,以实现电路板与软硬结合板的电性连接,并且能够提供形变空间供软性电路板在活动部的作用下发生形变,使得柔性电路板的空间与sma马达中内部的空间复用,从而有利于摄像模组的小型化。
69.在一些可能的实现方式中,所述活动部还包括基座和上簧片。所述基座位于所述电路板的上方。所述镜头位于所述基座的内侧,并连接所述基座。所述上簧片固定于所述基座的上方,所述多根悬线的一端固定于所述上簧片,另一端固定于所述固定部。
70.在本技术中,每根悬线的一端固定连接上簧片,在sma马达响应电信号,驱动活动部沿垂直于镜头的光轴的平面移动时,上簧片能够为活动部的移动提供缓冲力,使得活动部的移动更加平稳。与此同时,sma线断电后对活动部没有驱动力,上簧片具有弹性带动活动部与镜头移回至初始位置,使得活动部与镜头复位。也即,多根悬线与上簧片固定连接,解决了活动部晃动异常与姿势差的问题。
71.第二方面,本技术还提供一种摄像模组。摄像模组包括sma马达和镜头。所述sma马达包括固定部、活动部、多根sma线、支架和多根悬线。所述活动部位于所述镜头的出光侧,并位于所述固定部的上方。所述支架悬空地位于所述活动部的上方,并相对所述固定部固定连接。所述活动部包括活动板和图像传感器。所述活动板面向所述固定部,且与所述固定部间隔设置,所述图像传感器位于所述活动板的上方。所述活动部还包括第一电路板,所述第一电路板固定于所述活动板的上方。所述图像传感器安装于所述第一电路板。
72.所述sma线连接在所述固定部与所述活动板之间。所述多根sma线通电时产生收缩,带动所述活动板和所述图像传感器相对所述固定部移动。
73.在本技术中,支架悬空地位于活动部的上方,sma线响应电信号时,仅带动活动部(活动板、第一电路板和图像传感器)沿垂直于镜头的光轴的平面移动来实现防抖,无需带动镜头、镜头载体和支架移动,活动部的负载较小,从而有利于摄像模组的防抖功耗。与此同时,由于镜头对光线的聚集作用,相较于传统的移动镜头进行防抖的方案,本实施例的sma马达驱动图像传感器进行光路补偿所需要的补偿平移距离(即行程)更短,进一步降低了摄像模组的功耗。
74.在一些可能的实现方式中,所述多根悬线连接在所述支架与所述活动部之间,且分布于所述支架的周边。所述多根悬线悬吊所述活动部,使所述活动部悬空于所述固定部的上方。示例性的,多根悬线对称地位于支架的周缘,且每根悬线的一端笔直地固定于支架,另一端笔直地固定于活动部。
75.在本技术中,sma线断电后对活动部没有作用力,多根悬线支撑活动部,sma线断电
后活动部仍然能够与固定部间隔设置,使得活动部相对固定部的初始位置相同。
76.其中,在本技术中,活动部仅包括活动板、电路板及图像传感器,活动部的重量较小,当sma线断电后,活动部能够通过悬线自身的作用力恢复到初始位置,无需额外设置用于复位的簧片。在其他实施例中,悬线靠近支架的一端与能够与簧片连接,活动部通过簧片复位。本技术并不限定,活动部复位的方式。
77.在一些可能的实现方式中,所述支架包括支架本体及顶板。所述支架本体面向所述第一电路板,并与所述第一电路板间隔设置。所述顶板固定于所述支架本体的上方。所述多根悬线位于所述支架本体的周边,且每根所述悬线的一端固定于所述顶板,另一端固定于所述第一电路板。
78.示例性的,支架中的顶板固接于外壳的内壁,外壳固定于底板的周缘,以使支架相对固定部固定。支架本体固定于顶板的下方,且支架本体与活动部间隔设置,以使支架悬空地位于活动部的上方。
79.在一些可能的实现方式中,所述摄像模组还包括外壳和第二电路板。所述外壳固定于所述固定部,所述活动部、所述sma线和所述支架均收容于所述外壳的内侧。所述支架固定于所述外壳的内壁。所述第二电路板的一端固定连接所述固定部,另一端自所述固定部引出至所述外壳的外侧,且所述图像传感器与所述sma线分别与所述第二电路板电性连接。
80.在本技术中,第二电路板的部分结构位于外壳的外侧,用于与电子设备内部的其他元器件连接,以传输摄像模组内部的电信号。
81.在一些可能的实现方式中,所述第二电路板包括第一部分及与所述第一部分连接的第二部分。所述第一部分固定于所述固定部,且与所述第一电路板间隔设置。所述第二部分位于所述第一部分远离所述第一电路板的一侧,且所述第二部分位于所述外壳的外侧。示例性的,第一部分环绕在第一电路板的四周,也即,第一电路板位于第一部分的内侧。第二部分位于第一部分远离第一电路板的一侧,且延伸至底板的外部。
82.在本技术中,第二电路板包括第一部分及自第一部分引出至外壳外侧的第二部分,第一部分能够用于电性连接调焦组件中的线路,第二部分用于将摄像模组与电子设备中的其他元器件电性连接。
83.在一些可能的实现方式中,所述摄像模组还包括柔性连接件,所述柔性连接件电性连接在所述第一电路板与所述第一部分之间。其中,柔性连接件能够弯折。
84.在本技术中,第一电路板通过柔性连接件与第二电路板连接,以实现第一电路板与电子设备外部的元器件的电连接。摄像模组在防抖过程中,sma线在相应电信号带动第一电路板移动,柔性连接件能够弯折,柔性连接件能够吸收第一电路板的移动,避免第二电路板牵扯第一电路板而影响摄像模组的防抖。
85.在一些实施例中,第二部分的一端固接于底板,另一端用于固定连接电子设备中的其他元器件。示例性的,第二部分为硬性电路板。多根sma线的引出端固定于第二电路板。在本技术中,第二电路板相对底板固定连接,使得多根sma线的引出端能够稳固地固定于第二电路板,避免第二电路板在第一电路板的带动下移动,而影响多根sma线的引出端与第二电路板的稳固性。
86.在本技术中,柔性连接件与第一电路板及第二电路板为不同的结构。在其他实施
例中,柔性连接件也能够与第一电路板为一体结构,本技术对此并不限定。例如,第一电路板包括基板及位于基板上的柔性电路板,此柔性电路板与柔性连接件一体成型。
87.在一些可能的实现方式中,所述第一部分为中空结构,所述第一电路板位于所述第一部分的内侧。所述柔性连接件的数量为多个。多个所述柔性连接件对称排布,且每个所述柔性连接件的一端固定于所述第一电路板,另一端固定于所述第一部分。多个柔性连接件分布于第一电路板的周边,充分利用第一电路板与第一部分四周的间隙,有利于摄像模组的小型化。
88.在本技术中,第一电路板中的走线通过多个柔性连接件引出,每个柔性连接件分担第一电路板中的一部分走线,使得每个柔性连接件的宽度较薄,减小了第一电路板与第一部分之间间隙的宽度,从而有利于摄像模组的小型化。并且,在柔性连接件长度一定的基础上,柔性连接件的宽度较薄,有利于提高了柔性连接件的弯折性能,从而避免了柔性连接件干扰第一电路板的移动。可以理解的,单个柔性连接件分担第一电路板中引出的走线时,柔性连接件需要较宽的宽度才能将第一电路板中的全部走线引出,此时第一电路板与第一部分需要较宽的间隙。
89.在一些可能的实现方式中,所述第一电路板包括硬板部及与所述硬板部连接的软板部。所述硬板部固定于所述活动板。所述软板部自所述硬板部引出至所述外壳的外侧,并与所述第二电路板电性连接。其中,软板部设有弯折余量,第一电路板在sma组件中sma线的作用下移动时,软板部弯折变形避免第二电路板移动。
90.在本技术中,sma组件中的sma线通电时产生收缩,带动活动板、硬板部和图像传感器一起相对固定部平移以实现摄像模组的防抖。与此同时,软板部设有弯折余量,sma线对活动部产生作用力时,弯折余量能够吸收sma线作用力对其产生的位移量,避免固定于第二电路板一端的软板部牵扯硬板部的移动,从而有利于摄像模组的防抖。
91.在本技术中,第一电路板包括用于安装图像传感器的硬板部,及位于外壳外侧的软板部,软板部能够弯折变形,避免第一电路板在sma线的作用下移动时带动第二电路板,从而保证了第二电路板与电子设备中其他的元器件连接的稳固性。其中,硬板部与软板部能够一体成型,也能够为不同的结构通过工艺连接,本技术对此并不限定。本领域技术人员能够根据实际需设计硬板部与软板部。
92.在一些可能的实现方式中,所述固定部包括底板和位于底板上的固定板。所述sma线的一端固定于所述固定板,另一端固定于所述活动板。所述底板设有走线。所述走线与所述sma线电性连接。所述第二电路板自所述底板引出,且所述第二电路板与所述走线连接。
93.示例性的,位于底板上的走线通过刻蚀、半导体沉积工艺,嵌设于底板。走线也能够形成为柔性电路板,通过粘接的方式固定于底板,本技术并不限定走线设于底板的方式。其中,第二电路板与走线连接,且第二电路板自底板引出,并延伸至外壳的外侧。第二电路板用于与电子设备内部的其他元器件电性连接。
94.在本技术中,通过工艺在底板上形成与sma线电性连接的走线,走线集成于底板上,减小了摄像模组中电路板的设计。
95.在一些可能的实现方式中,所述sma马达还包括调焦组件。所述调焦组件安装于所述支架,所述镜头位于所述调焦组件的内侧。所述调焦组件响应电信号时,驱动所述镜头沿所述镜头的光轴方向移动。
96.在本技术中,sma马达中的sma组件用于实现摄像模组的防抖,调焦组件用于实现摄像模组的调焦,也即摄像模组中调焦功能与防抖功能由不同的结构驱动,有利于实现摄像模组的大角度防抖。示例性的,调焦组件与sma组件的电信号最终通过第二电路板,与电子设备的其他元器件进行传输。
97.第三方面,本技术还提供一种电子设备。电子设备包括壳体、图形处理器及如上第一方面或第二方面中的摄像模组。所述图形处理器及所述摄像模组收容于所述壳体。所述摄像模组电连接所述图形处理器。
98.在本技术中,电子设备包括上述采用sma马达的摄像模组,sma马达中多根悬线用于将活动部悬空地置于固定部的上方,活动部相对固定部沿垂直于镜头的光轴的平面移动时,活动部与固定部之间不存在摩擦力,避免了电子设备处于不同位姿时对摄像模组的驱动算法造成的难度。
99.第四方面,本技术还提供一种sma马达。sma马达包括固定部、活动部、多根sma线和多根悬线,所述多根悬线连接在所述固定部与所述活动部之间,且分布于所述活动部的周边,所述多根悬线支撑所述活动部,使所述活动部悬空于所述固定部的上方;所述多根sma线连接在所述固定部与所述活动部之间,所述多根sma线通电时产生收缩,带动所述活动部相对所述固定部移动。
100.在本技术中,摄像模组设有多根支撑活动部的悬线,以使活动部悬空地位于固定部的上方,固定部与活动部之间无需额外设置用于支撑活动部的支撑件,固定部与活动部之间间隔设置,使得当活动部相对固定部移动时,活动部与固定部之间不存在滑动摩擦力,避免sma马达处于不同位姿时,活动部与固定部之间的摩擦力不同而对摄像模组的驱动算法造成的难度。
101.在一些可能的实现方式中,所述活动部包括镜头载体和多个上簧片。所述镜头载体用于固定镜头。所述多个上簧片分布于所述镜头载体的周边,且与所述多根悬线一一对应。各所述上簧片的一端固定于所述镜头载体的顶侧,另一端固定于对应的所述悬线。
102.在本技术中,支撑活动部的多根悬线与上簧片固定连接,上簧片具有弹性能够为活动部的移动提供缓冲力,也能够带动活动部与镜头移回至初始位置,使得活动部中的活动板无需额外设置与固定部连接的弹簧臂,避免了设置弹簧臂的工艺难度,从而降低了摄像模组的成本。
103.在一些可能的实现方式中,所述固定部包括防抖引入线和防抖引出线。所述防抖引入线电性连接所述sma线的一端。在本技术中,防抖引入线和防抖引出线分别与sma线电性连接,以形成闭环回路。可以理解的,防抖引入线和防抖引出线能够分别看作sma线的正负极。
104.在一些可能的实现方式中,所述sma马达还包括副悬线,所述副悬线的一端固定于所述固定部,并电性连接所述防抖引出线。所述副悬线的另一端固定于所述活动部,并电性连接所述sma线的另一端。示例性的,副悬线的一端笔直地固定于固定部,另一端笔直地固定于活动部。其中,副悬线采用导电材料,相当于导线。
105.在本技术中,副悬线的一端笔直地固定于固定部,另一端笔直地固定于活动部,副悬线不仅电性连接在防抖引入线与防抖引出线,而且能够支撑活动部,增加活动部悬空地置于固定部上方的可靠性。在其他实施例中,副悬线也能够为对固定部没有支撑力的导线,
仅用于实现电性连接,本技术对此并不限定。
106.在一些可能的实现方式中,所述防抖引入线的数量为多条。多条所述防抖引入线一一对应地电性连接多根所述sma线。所述活动部包括面向所述固定部的活动板,多根所述sma线固定于所述活动板。所述sma马达还包括防抖连接线。所述防抖连接线连接在所述活动板与所述副悬线之间,且所述活动板采用导电材料,以使所述防抖连接线与每根所述sma线均电性连接。
107.在本技术中,多条防抖引入线分别与多根sma线电性连接,多根sma线固定于采用导电材料的活动板,活动板通过防抖连接线与副悬线电性连接防抖引出线,以实现了sma马达中防抖线路的闭环回路。其中,多条防抖引入线并联设置,最终通过活动板和副悬线与防抖引出线串联,节省了防抖引出线的数量,有利于简化sma线的线路设计。
附图说明
108.为了说明本技术实施例或背景技术中的技术方案,下面将对本技术实施例或背景技术中所需要使用的附图进行说明。
109.图1是本技术实施例提供的电子设备的结构示意图;
110.图2是本技术实施例提供的摄像模组在一些实施例中的结构示意图;
111.图3是图2所示摄像模组的部分结构示意图;
112.图4是图2所示摄像模组的部分分解结构示意图;
113.图5是图4所示sma马达的部分分解结构示意图;
114.图6是图4所示sma马达的部分结构的俯视图;
115.图7是图2所示摄像模组沿a-a线处的截面示意图;
116.图8是图5所示调焦组件的部分分解结构示意图;
117.图9是图3所示摄像模组的一部分结构示意图;
118.图10是图7所示结构的部分结构示意图;
119.图11是图3所示sma马达的部分结构示意图;
120.图12是图11所示结构的部分结构示意图;
121.图13是图11所示结构的电路原理图;
122.图14是图3所示sma马达的再一部分结构示意图;
123.图15是图3所示摄像模组的再一部分结构示意图;
124.图16是图15所示摄像模组的部分结构示意图;
125.图17是本技术实施例提供的摄像模组在实施例二中的结构示意图;
126.图18是图17所示摄像模组的部分结构示意图;
127.图19是图17所示摄像模组的分解结构示意图;
128.图20是图17所示结构沿b-b线处的截面示意图;
129.图21是图20所示截面图的部分结构示意图;
130.图22是图21所示摄像模组的部分结构的俯视图;
131.图23是本技术实施例提供的摄像模组在实施例三中的部分结构示意图;
132.图24是图23所示结构的截面示意图;
133.图25是图24所示a部分的放大结构示意图;
134.图26是图23所示摄像模组的部分结构示意图;
135.图27是本技术实施例提供的摄像模组在实施例四中的结构示意图;
136.图28是图27所示摄像模组的部分结构示意图;
137.图29是图27所示摄像模组的部分分解结构示意图;
138.图30是图27所示摄像模组的俯视图;
139.图31是图30所示结构沿c-c线处的截面示意图;
140.图32是图31所示b部分的放大结构示意图;
141.图33是图28所示摄像模组的部分结构示意图;
142.图34是图28所示摄像模组的又一部分结构示意图;
143.图35是图34所示结构的俯视图;
144.图36是图28所示摄像模组在另一角度的结构示意图;
145.图37是图30所示结构沿d-d线处的截面示意图;
146.图38是本技术实施例提供的摄像模组在实施例五中的结构示意图;
147.图39是图38所示摄像模组的部分结构示意图;
148.图40是图38所示摄像模组的截面示意图;
149.图41是本技术实施例提供的摄像模组在实施例六中的结构示意图;
150.图42是图41所示摄像模组的部分截面示意图;
151.图43是图41所示摄像模组的部分结构示意图。
具体实施方式
152.下面结合本技术实施例中的附图对本技术实施例进行描述。
153.本技术实施例中所提到的方位用语,例如,“上”、“下”、“左”、“右”、“内”、“外”等,仅是参考附图的方向,因此,使用的方位用语是为了更好、更清楚地说明及理解本技术实施例,而不是指示或暗指所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术实施例的限制。
154.请参阅图1,图1是本技术实施例提供的电子设备100的结构示意图。电子设备100包括壳体101及摄像组件102。摄像组件102收容于壳体101。摄像组件102能够使得电子设备100实现获取影像或即时视频通话等功能。电子设备100可以是手机、平板电脑、笔记本电脑、车载设备、可穿戴设备、无人机等产品。可穿戴设备可以是智能手环、智能手表、增强现实(augmented reality,ar)眼镜、虚拟现实技术(virtual reality,vr)眼镜等。在本技术的实施例中,以电子设备100是手机为例进行描写。
155.一些实施例中,电子设备100还包括存储器103、图形处理器104和电池105。存储器103用于存储计算机程序代码。计算机程序代码包括计算机指令。图形处理器104用于调用计算机指令以使电子设备100执行相应的操作,例如,图形处理器104与摄像组件102通信连接,用于从摄像组件102获取图像数据,并处理图像数据。电池105用于为电子设备100供电。其中,图1所示存储器103、图形处理器104和电池105的位置及形状仅为示例,本技术对此并不限定。
156.一些实施例中,壳体101包括中框1011和后盖1012。后盖1012设有用于采集光线的摄像孔1013。摄像组件102位于后盖1012的内侧,通过后盖1012的摄像孔1013获取图像信
息。用户在使用电子设备100的过程中,后盖1012一般为背离用户的一侧。后盖1012朝向的空间为电子设备100的后方。在本技术实施例中,以摄像组件102用作电子设备100的后置摄像头为例来进行描写。
157.示例性的,摄像组件102包括多个摄像模组。摄像孔1013的数量为多个,且多个摄像孔1013与多个摄像模组一一对应。多个包含两个及两个以上。如图1所示,摄像组件102包括第一摄像模组1021、第二摄像模组1022及第三摄像模组1023。在本技术实施例中,以摄像组件102包括三个摄像模组为例来进行描写,在其他实施例中,摄像组件102也可以包括2个、4个或5个等摄像模组,本技术对此并不限定。
158.在本技术实施例中,电子设备100可以通过多个摄像模组的配合拍摄,提高电子设备100的成像质量,满足用户拍摄不同场景的需求。例如,电子设备100的摄像组件102集成微距镜头、长焦镜头及广角镜头,以满足用户拍摄不同场景的需求。电子设备100的多个摄像模组还可以集成黑白镜头与彩色镜头,以提升电子设备100拍摄的夜景效果。在其他一些实施例中,摄像组件102也能够包括单个摄像模组。本技术并不限定摄像组件102中摄像模组的具体功能、特性及数量等。
159.在其他一些实施例中,电子设备100还可以包括与后盖1012相背设置的显示屏(图中未示出)。显示屏用于显示画面。摄像组件102通过显示屏的摄像孔采集电子设备100外部的光线,此时摄像组件102用作电子设备100的前置摄像头。换言之,摄像组件102可以用作电子设备100的后置摄像头,也可以用作电子设备100的前置摄像头,本技术实施例对此不作严格限定。在本技术实施例中,以摄像组件102用作电子设备100的后置摄像头为例来进行描写。
160.请参阅图2和图3,图2是本技术实施例提供的摄像模组10在实施例一中的结构示意图;图3是图2所示摄像模组10的部分结构示意图。图3所示摄像模组10不包括外壳。本技术提供的电子设备至少包括一个摄像模组10。至少一个包含一个和一个以上。在本技术实施例中,以图1摄像组件102中的第一摄像模组1021、第二摄像模组1022或第三摄像模组1023任意一者,采用摄像模组10为例来进行描写。在其他实施例中,摄像模组10也能够应用于电子设备中的前置摄像头,本技术对此并不限定。
161.摄像模组10包括镜头11、形状记忆合金(shape memory alloys,sma)马达12、底座13、电路板14和外壳17。镜头11具有汇聚光线的作用。光线自镜头11的入光侧进入镜头11,自镜头11的出光侧射出镜头11。镜头11的主要部分位于sma马达12的内侧,镜头11的部分结构伸出至sma马达12的外侧。sma马达12可以用于实现摄像模组10的防抖。sma马达12也可以用于实现摄像模组10的调焦,本技术对此并不限定。外壳17包围sma马达12,用于保护sma马达12。
162.底座13与电路板14均位于sma马达12的下方,且底座13安装于电路板14的上方。其中,在本技术实施例中,光线自镜头11的上方进入镜头11内,并自镜头11的下方射出。也即,上方位于镜头11的入光侧,下方位于镜头11的出光侧。底座13与电路板14均位于镜头11的出光侧。底座13可以用于承载sma马达12。电路板14位于底座13的下方。示例性的,底座13固定于电路板14。电路板14用于实现摄像模组10与电子设备中其他元器件(例如图形处理器)的电性连接,以实现信号的传输。
163.在一些实施例中,电路板14是同时具备硬性电路板(printed circuit boards,
pcb)与柔性电路板(flexible printed circuit boards,fpc)特性的电路板。如图2所示,示例性的,电路板14包括硬板部141及自硬板部141引出的软板部142。底座13固定于硬板部141。软板部142自硬板部141引出至sma马达12的外侧,用于电连接电子设备内的其他元器件,例如上述图形处理器,以将摄像模组10的信号传递至图形处理器。示例性的,硬板部141包括补强结构,例如补强钢板,本技术对此并不限制。
164.在一些实施例中,硬板部141可以是一个硬性电路板,且设有电性连接软板部142的走线,此硬性电路板可以通过各种方法与sma马达12中的其他部件相连。与此同时,硬板部141上安装有各种元器件(例如图像传感器),通过工艺与柔板部112电性连接,以使图像传感器中获取的信号通过柔板部112传输至其他元器件(例如图形处理器)。在其他一些实现方式中,硬板部141也可以通过在基板上放置柔性电路板以及元器件,柔性电路板通过工艺,例如引线焊接(wire bonding)实现与图像传感器的电信号连接,通过软板部142引出信号线。本领域技术人员能够根据实际需求对电路板14进行设计,本技术并不限制电路板14的具体结构及形成工艺等。
165.在本技术实施例中,软板部142可以弯折变形,软板部142能够通过弯折变形固定于所需要的地方,有利于电子设备内其他元器件的排布。其中,镜头11相对硬板部141固定,以保证了镜头11的稳固性。
166.请继续参阅图3和图4,图4是图2所示摄像模组10的部分分解结构示意图。sma马达12包括固定部121、活动部122、多根sma线123和多根悬线124。镜头11安装于活动部122的内侧,且固定部121位于镜头11的出光侧。固定部121固定于底座13的上方。活动部122位于固定部121的上方。多根悬线124连接在固定部121与活动部122之间,且分布于活动部122的周边。示例性的,每根悬线124的一端笔直地固定于固定部121,另一端笔直地固定于活动部122。可以理解的,多根悬线124将活动部122支撑于固定部121的上方。
167.sma线123连接在固定部121与活动部122之间。sma线123通电时产生收缩,带动活动部122和镜头11相对固定部121移动,以实现摄像模组10的防抖。示例性的,sma线123用于驱动活动部122和镜头11相对固定部121,沿垂直于镜头11的光轴的平面移动。其中,sma线123的数量为多根,多根sma线123共同的作用力带动活动部122相对固定部121移动。
168.图3中sma线123的线宽胶轮廓线粗,以示区分sma线123与结构的轮廓线。本技术对sma线123的粗细并不限定,本领域的技术人员能够根据实际需求选择sma线123。sma线123采用形状记忆合金(shape memory alloys,sma)材料,例如镍钛合金材料。形状记忆合金是一类具有形状记忆效应金属的总称。一般金属材料在受到外力作用后,首先发生的是弹性形变,此时若撤除外力作用,则金属将恢复原来形状,若继续增加外力,当达到金属的自身屈服点之后,会产生塑性形变,外力消除后就留下永久变形,即使加热也不会发生形状恢复。而形状记忆合金是一种在加热升温后能完全消除其在较低的温度下发生的变形,恢复其变形前原始形状的合金材料。形状记忆合金材料工作的基本原理,是将材料加热到某个临界温度以上进行形状记忆热处理(training),并使其发生一定的形变。冷却生成马氏体相后,再次将其加热到临界温度之上时,由低温马氏体相逆相变为高温奥氏体相(即产生逆向转变),从而恢复到变形前所记忆的状态。
169.在本实施例中,sma线123通电时,通电产生的热量使得sma线123的温度上高,实现由低温马氏体相逆相变为高温奥氏体相,恢复到变性前记忆,从而使sma线123产生收缩。由
于sma线123的收缩导致的长度变化,实质上是由于材料晶相结构转换时产生的,即马氏体与奥氏体之间的转换。而这种因晶体结构变化(即原子与原子之间的间隙变换)的微观粒子之间的引力,使得宏观sma线123收缩时的拉力较一般磁铁线圈间的电磁力大很多,因此sma线123的收缩可以驱动更重的负载,即可以实现大载重,故而sma马达12能够以较小的尺寸实现较大的驱动力。
170.在本实施例中,由于sma线123通电时产生收缩,会对活动部122产生对应的拉力,因此摄像模组10可以通过控制多根sma线123的电信号,使多根sma对活动部122施加的合力朝向预期方向,从而驱动包括镜头11的活动部122向预期的方向和位置移动,使得摄像模组10能够通过平移镜头11实现防抖。
171.此外,相较于传统的防抖马达(也即音圈马达),sma马达采用线材驱动方式、而非磁场驱动方式,sma马达的结构更为精简,有助于摄像模组的小型化,并且可以降低摄像模组对周边环境产生的磁干扰。
172.如图4所示,摄像模组10还包括图像传感器15和滤光片16。图像传感器15和滤光片16均位于sma马达12的下方。图像传感器15是一种将光学图像转换成电信号的设备。外界的光线穿过镜头11后落入到图像传感器15的感光面,在图像传感器15上成像。图像传感器15可以是电荷耦合器件(charge-coupled device,ccd),也可以是互补金属氧化物半导体(complementary metal-oxide semiconductor,cmos),本技术对此并不限制。滤光片16用于过滤穿过镜头11光线中的杂光。示例性的,底座13设有用于固定滤光片16的台阶结构。
173.请一并参阅图3和图5,图5是图4所示sma马达12的部分分解结构示意图。在一些实施例中,固定部121包括底板1211和固定板1212。底板1211固定于底座13的上方,固定板1212固定于底板的上方。在本技术实施例中,以底板1211与底座13为两个不同的部件,底板1211通过底座13固接于电路板14为例来进行描写。在其他一些实施例中,底板1211与底座13能够一体成型,本技术对此并不限定。
174.活动部122包括活动板1221和调焦组件1222。活动板1221位于固定板1212的上方。调焦组件1222安装于活动板1221的上方,用于带动镜头11沿镜头11的光轴方向移动,实现摄像模组10的调焦。在本技术实施例中,活动部222不仅能在sma线223的作用下带动镜头21沿垂直于镜头21的光轴的平面移动,实现摄像模组20的防抖,而且活动部222中的调焦组件1222能够驱动镜头21相对固定部221沿镜头21的光轴方向移动,实现摄像模组20的调焦,使得摄像模组20同时具备防抖与调焦,提高了摄像模组20的成像质量。
175.本技术实施中,以sma马达12中的活动部122包括用于调焦的调焦组件1222为例来进行描写,此时sma马达12既能够实现摄像模组10的防抖,也能够实现摄像模组10的调焦。在其他实施例中,sma马达12中的活动部122也能够不包括调焦组件1222,本技术对此并不限定。例如,在其他实施例中,活动部122仅包括活动板1221及固定镜头11的镜头载体。镜头11安装于镜头载体的内侧,以使活动部122带动镜头11相对固定部121移动。
176.请继续参阅图6,图6是图4所示sma马达12的部分结构的俯视图。sma线123的数量为多根,多根sma线123对称设于活动板1221的周缘。每根sma线123的一端固定于固定板1212,另一端固定于活动板1221。多根sma线123共同的作用带动活动板1221及安装于活动板1221上的结构一起平移。示例性的,sma线123的数量为四根。四根sma线123包括第一sma线1231、第二sma线1232、第三sma线1233以及第四sma线1234。
177.第一sma线1231与第二sma线1232相对第一基准面1235对称设置,第三sma线1233与第四sma线1234相对第二基准面1236对称设置。第一基准面1235及第二基准面1236均经过镜头11的光轴110。此时,第一基准面1235与第二基准面1236相交。示例性的,第一基准面1235与第二基准面1236相互垂直。在其他实施例中,第一基准面1235与第二基准面1236之间的角度也可以是其他角度。第一sma线1231和第二sma线1232组成第一对sma线,第三sma线1233和第四sma线1234组成第二对sma线。第一对sma线与第二对sma线相对第二基准面1236对称设置。
178.在本实施例中,通过限定四根sma线123的位置关系,使得摄像头模组可以通过控制四根sma线123内的电信号,使得四根sma线123对活动板1221的合力沿第一基准面1235移动或者沿第二基准面1236移动,并且可以通过在第一基准面1235上的位移和在第二基准面1236上的位移的合成位移,使得活动板1221携带镜头11移动至摄像头模组的xy平面(也即镜头11的光轴110的垂直平面)的任意位置,从而实现摄像模组10的平移式防抖。
179.其中,sma线123的一端可以通过固定于固定板1212的固定爪,sma线123的另一端可以通过固定于活动板1221的活动爪。固定爪及活动爪可采用导电材料,或者形成导电结构,以使sma线123电连接活动板1221及固定板1212。
180.可以理解的是,摄像头模组的四根sma线123在满足上述位置关系要求的情况下,可以有多种具体的连接方式,本实施例以其中一种为例进行描述。
181.如图6所示,示例性的,固定板1212及活动板1221均大致呈矩形板状。固定板1212中两个对角处分别设有第一固定爪1261、第二固定爪1262、第三固定爪1263和第四固定爪1264。第一固定爪1261与第二固定爪1262为一组固定爪,第三固定爪1263与第四固定爪1264为另一组固定爪。两组固定爪分别位于固定板1212的两个对角。活动板1221中两个对角处分别设有第一活动爪1271、第二活动爪1272、第三活动爪1273和第四活动爪1274。第一活动爪1271与第二活动爪1272为一组,第三活动爪1273与第四活动爪1274为另一组。两组活动爪分别位于活动板1221的两个对角处,且两组固定爪与两组活动爪分别位于四个对角处。
182.第一sma线1231的一端固定于第一固定爪1261,另一端固定于第一活动爪1271。第二sma线1232的一端固定于第二固定爪1262,另一端固定于第四活动爪1274。第三sma线1233的一端固定于第三固定爪1263,另一端固定于第三活动爪1273。第四sma线1234的一端固定于第四固定爪1264,另一端固定于第二活动爪1272。
183.在本技术实施例中,sma线123的一端固定于固定板1212的一个对角位置、另一端固定于活动板1221的另一对角位置,sma线123在sma马达12内部空间有限的情况下具有较为足够的长度,具有足够的伸缩量,使得sma马达12具有较大的驱动行程区间,有利于实现摄像模组10的大角度防抖。
184.在其他一些实施例中,活动板1221与固定板1212也可以有其他形状,例如圆角矩形板状、圆形板状等形状。可以理解的是,当活动板1221与固定板1212的周侧面的各个侧面随活动板1221与固定板1212的形状变化而发生适应性变化。
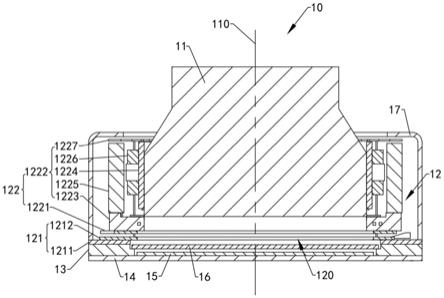
185.请继续参阅图7,图7是图2所示摄像模组10沿a-a线处的截面示意图。底板1211固定于底座13的上方。外壳17固定于底板1211。固定板1212固定于底板1211的上方。活动部122位于固定板1212的上方。镜头11安装于活动部122的内侧。活动部122中的活动板1221面
向固定板1212,且镜头11位于活动板1221的上方。外壳17为两端开口的中空结构,固定板1212、活动部122及镜头11收容于外壳17的内侧。
186.在一些实施例中,图像传感器15固定于电路板14朝向镜头11的一侧。图像传感器15与电路板14之间电性连接,使得图像传感器15形成的电信号通过电路板14传输到其他元器件上。镜头11位于底座13远离图像传感器15的一侧。滤光片16固定于底座13,且与图像传感器15相对设置。示例性的,滤光片16在电路板14上的投影与图像传感器15在电路板14上的投影部分或全部重叠。
187.在本技术实施例中,外界穿过镜头11的光线经过滤光片16后照射于图像传感器15上。滤光片16位于图像传感器15与镜头11之间,能够过滤穿过镜头11光线中的杂光,使得摄像模组10拍摄的照片更加真实,从而提高摄像模组10的质量。
188.请一并参阅图5及图7,在一些实施例中,底板1211设有贯穿底板1211的第一通光孔1201。固定板1212设有贯穿固定板1212的第二通光孔1202。活动板1221设有贯穿活动板1221的第三通光孔1203。第一通光孔1201、第二通光孔1202及第三通光孔1203依次连通,并与滤光片16相对设置。第二通光孔1202与第三通光孔1203连通,且与第一通光孔1201连通。第一通光孔1201、第二通光孔1202及第三通光孔1203形成贯通底板1211、固定部121及活动板1221的光线通道120。
189.如图5所示,第三通光孔1203、第二通光孔1202及第一通光孔1201的形状仅为示例,本技术对此并不限定。底板1211、固定板1212及活动板1221组装后,第一通光孔1201、第二通光孔1202及第三通光孔1203共同形成光线通道120。光线通道120位于镜头11与滤光片16之间。
190.在本技术实施例中,位于镜头11与滤光片16之间的底板1211、固定部121及活动板1221设有光线通道120,使得穿过镜头11的光线直接通过滤光片16过滤杂光,避免光线的损失而影响图像的成像质量。
191.请一并参阅图7和图8,图8是图5所示调焦组件的部分分解结构示意图。示例性的,调焦组件1222包括基座1223、镜头载体1224、第一驱动件1225、第二驱动件1226、簧片1227和连接片1228。基座1223固定于活动板1221的上方。镜头载体1224用于承载镜头11。第一驱动件1225相对基座1223固定,第二驱动件1226相对镜头载体1224固定。簧片1227可以用于实现基座1223与镜头载体1224的连接。示例性的,簧片1227包括多个上簧片1229和多个下簧片1220。
192.连接片1228用于实现调焦组件1222电信号的传输。连接片1228可以是电路板、也可以是设有导线的结构件,本技术对此并不限定。当调焦组件1222响应电信号时,第二驱动件1226与第一驱动件1225之间形成磁场效应,驱动镜头11相对底板1211移动。
193.在本技术实施例中,sma马达12响应电信号时,活动部122带动镜头11一起相对固定部121移动。在本技术实施例一中,以活动部122包括调焦组件1222为例来进行描写,其移动的方向可以是镜头11的光轴方向,也可以是垂直于镜头11的光轴的平面移动。例如:当sma马达12响应电信号,能够驱动镜头11相对固定部121沿垂直于镜头11的光轴的平面移动,以补偿光路的偏移,实现摄像模组10的防抖。当sma马达12响应电信号,也能够驱动镜头11相对固定部121沿镜头11的光轴方向移动时,改变镜头11与图像传感器15之间的距离,以实现摄像模组10的调焦。
194.请继续参阅图7和图8,基座1223固定于活动板1221的上方。第一驱动件1225固定于基座1223。镜头11固定于镜头载体1224的内侧。第二驱动件1226固定于镜头载体1224的外侧,且与第一驱动件1225相对设置。镜头载体1224通过簧片1227与基座1223连接。镜头载体1224相对基座1223悬空设置,簧片1227支撑镜头载体1224及固定于镜头载体1224的第二驱动件1226和镜头11。
195.在本技术实施例中,当第一驱动件1225或第二驱动件1226响应电信号时,第二驱动件1226与第一驱动件1225之间形成磁场效应,驱动镜头11沿垂直于镜头11的光轴110方向移动,以改变镜头11与图像传感器15之间的距离,从而实现摄像模组10的调焦。
196.在一些实施例中,第一驱动件1225包括磁性体,第二驱动件1226包括线圈。如图8所示,示例性的,磁性体与线圈的数量均为两个。两个磁性体分别固定于基座1223相背设置的两侧,两个线圈分别固定于镜头载体1224相背设置的两侧。两个磁性体与两个线圈一一对应。当线圈通电后,线圈与对应的磁性体之间产生电磁力,驱动线圈带动镜头11沿镜头11的光轴110方向移动。例如,图7中左侧的磁性体与线圈对镜头载体1224产生向上的电磁力,右侧的磁性体与线圈对镜头载体1224也产生向上的电磁力,使得镜头载体1224与镜头11一起向上移动,改变了镜头11与图像传感器15之间的距离,从而实现了摄像模组10的调焦。
197.在本技术实施例中,第一驱动件1225包括磁性体,第二驱动件1226包括线圈,此时,基于线圈的重量较小(也小于磁性体),第一驱动件1225、镜头载体1224及镜头11整体的重量较小,使得簧片1227的负载较小,从而有利于降低摄像模组10的调焦功耗。在其他实施例中,第一驱动件1225也可以包括线圈,第二驱动件1226包括磁性体,本技术对此并不限定。
198.在本技术实施例中,以磁性体与线圈的数量为两个,分别位于镜头载体1224相背设置的两侧为例来进行描写。在其他实施例中,磁性体与线圈的数量也能够不一一对应,本技术对此并不限定。例如,磁性体的数量为四个,线圈的数量为单个。四个磁性体分别固定于基座1223的四个对角处,单个线圈固定且环绕于镜头载体1224的四周,四个磁性体与线圈之间的电磁力均向上或向下,以带动镜头11沿垂直于镜头11的光轴110方向移动。
199.请继续参阅图7和图9,图9是图3所示摄像模组10的一部分结构示意图。多个上簧片1229与多个下簧片1220分别位于镜头载体1224相背设置的两端。多个上簧片1229分布于镜头载体1224的周边,且与多根悬线124一一对应。各上簧片1229的一端固定于镜头载体1224的顶侧,另一端固定于对应的悬线124。多个下簧片1220固定于镜头载体1224的底侧。光线自镜头载体1224的顶侧朝镜头载体1224的底侧的方向进入镜头。示例性的,悬线124的一端固定于底板1211,以使上簧片1229的一端相对底板1211固定。下簧片1220连接基座1223与镜头载体1224。镜头11固定于镜头载体1224的内侧。活动板1221在sma线123的作用力下移动时,基座1223、下簧片1220、镜头载体1224及镜头11一起移动。
200.在本技术实施例中,簧片1227包括分别固定于镜头载体1224上下两端的上簧片1229与下簧片1220,调焦组件1222响应电信号驱动镜头11移动时,上簧片1229与下簧片1220具有弹性为镜头11的移动提供缓冲力,避免镜头11突然沿镜头11的光轴110方向移动,使得镜头11的移动更加平稳。与此同时,调焦组件1222断电后,调焦组件1222对镜头11没有驱动力,上簧片1229与下簧片1220发生形变后具有恢复形变的能力,上簧片1229与下簧片1220带动镜头11移回至初始位置,使得镜头11复位。
201.其中,在本技术实施例中,簧片1227均直接与镜头载体1224连接。在其他一些实施例中,簧片1227也能够与镜头载体1224间接连接,本技术实施例并不限定簧片1227与镜头载体1224的具体连接方式。
202.在一些实施例中,上簧片1229包括依次连接的第一平直部、弯折部及第二平直部。第一平直部固定于镜头载体1224,第二平直部固定于基座1223。弯折部位于镜头载体1224与基座1223形成的间隙。示例性的,第一平直部、弯折部及第二平直部一体成型,节省了上簧片1229的组装时间,并且避免上簧片1229组装过程中变形。
203.在本技术实施例中,上簧片1229固定于镜头载体1224的一端,与固定于基座1223的另一端均为平直部,使得上簧片1229的两端处于同一水平面,避免上簧片1229中弯折部发生形变过程中带动第一平直部弯曲而造成镜头11的倾斜,从而提高摄像模组10调焦的准确性。
204.在一些实施例中,每根悬线124的一端固定于底板1211,另一端固定于上簧片1229。多根悬线124的一端一一对应地固定于多个上簧片1229。多根悬线124对称地设于活动部122的周缘,以保证多根悬线124稳固地支撑活动部122。
205.在本技术实施例中,多根悬线124支撑活动部122,避免多根sma线123承受活动部122的重量,而影响sma线123的性能。并且,多根悬线124的一端固定于调焦组件1222的上簧片1229,上簧片1229不仅能够为镜头11沿镜头11的光轴110方向移动时提供缓冲力,也能够在活动部122沿垂直于镜头11的光轴110的平面移动时,为活动部122的移动提供缓冲力,使得活动部122的移动更加平稳。与此同时,sma线123断电后对活动部122没有驱动力,上簧片1229具有弹性带动活动部122与镜头11移回至初始位置,使得活动部122与镜头11复位。也即,多根悬线124与调焦组件1222的上簧片1229固定连接,解决了活动部122晃动异常与姿势差的问题。
206.并且,悬线124的一端固定于底板1211,另一端固定于活动部中远离底板1211一侧的上簧片1229,悬线124的长度较长,使得悬线124在保证支撑活动部122结构刚性的基础上能够倾斜,避免悬线124过短无法倾斜,而阻碍活动部122相对固定部121的移动。
207.传统技术中,sma防抖组件包括连接在固定部与活动板之间的两个弹簧臂。弹簧臂用于解决活动部晃动异常及姿势差的问题。弹簧臂需要设计一定的弹性余量,以保证sma线断电后能够恢复至初始位置;并且弹簧臂的弹性余量需要设计上限,避免弹簧臂对sma线产生的力过大,以保证sma线的使用寿命,增加了弹簧臂的设计难度。
208.而在本技术实施例中,支撑活动部122的多根悬线124与调焦组件1222的上簧片1229固定连接,上簧片1229具有弹性能够为活动部122的移动提供缓冲力,也能够带动活动部122与镜头11移回至初始位置,使得活动部122中的活动板无需额外设置与固定部121连接的弹簧臂,避免了设置弹簧臂的工艺难度,从而降低了摄像模组10的成本。在本技术实施例中,多根悬线124与调焦组件1222的上簧片1229固定连接,解决了活动部122晃动异常与姿势差的问题。
209.示例性的,多个上簧片1229对称排布,且多根悬线124对称排布。上簧片1229与悬线124的数量均为四个,四个上簧片1229与四根悬线124一一对应。四个簧片1227与四根悬线124均在x轴方向上均对称排布,且在y轴方向上均对称排布。x轴方向与y轴方向均垂直于z轴方向,且均与z轴方向相交。其中,z轴方向为镜头11的光轴。
210.每根悬线124的长度及延伸方向均相同,以使每根悬线124受到相同作用力时倾斜的角度相同,避免每根悬线124倾斜角度不同,而导致镜头11倾斜,从而提高了摄像模组10防抖的准确性。
211.在本技术实施例中,支撑活动部122的多根悬线124对称排布,摄像模组10处于不同位姿时,每根悬线124的对活动部122的作用力相同,有利于降低摄像模组10驱动算法的控制难度。其中,多个上簧片1229对称排布,每个上簧片1229对每根悬线124产生的作用力相同,使得每根悬线124受力均衡。
212.请一并参阅图7与图10,图10是图7所示结构的部分结构示意图。活动部122悬空地位于固定部121的上方。示例性的,活动部122中面向固定部121的活动板1221与固定部121间隔设置。每根悬线124的一端笔直地固定于底板1211,另一端笔直地固定于活动部122,以将活动部122悬空地支撑于固定部121上,活动部122与固定部121之间无需额外设置支撑件,从而使得活动部122与固定部121间隔设置。
213.传统技术中,sma马达包括固定部、活动部和位于固定部与活动部之间的支撑件。支撑件用于支撑活动部。活动部相对固定部沿垂直于镜头的光轴的平面移动时,活动部与支撑件之间滑动连接,此时活动部与支撑件的滑动面存在摩擦力,此摩擦力干扰活动部的移动。基于摩擦力与支撑件承受的压力有关,当支撑件承受的压力不同时,支撑件与活动部之间的摩擦力不同,因此电子设备处于不同姿势,活动部的重力方向与滑动面之间形成不同的角度,使得滑动面承受的压力不同,导致活动部与支撑件之间的滑动摩擦力不同,干扰摄像模组防抖的准确性。
214.而在本技术实施例中,摄像模组10设有多根支撑活动部122的悬线124,以使活动部12悬空地位于固定部121的上方,固定部121与活动部122之间无需额外设置用于支撑活动部122的支撑件,固定部121与活动部122之间间隔设置,使得当活动部122相对固定部121移动时,活动部122与固定部121之间不存在滑动摩擦力,避免了电子设备处于不同位姿时,活动部122与固定部121之间的摩擦力不同而对摄像模组10的驱动算法造成的难度。
215.可以理解的,sma线123通电时产生收缩,带动活动部122在垂直于镜头11的光轴110的平面上移动时,多根悬线124沿活动部122移动的方向倾斜,避免了多根悬线124的刚性干扰活动部122相对固定部121的移动,从而有利于摄像模组10的防抖。sma线123断电后对活动部122没有作用力,活动部122恢复到初始位置的过程中,与活动部122连接的上簧片1229能够缓冲活动部122的受力,使得活动部122平稳地恢复至初始位置。
216.请一并参阅图11和图12,图11是图3所示sma马达12的部分结构示意图;图12是图11所示结构的部分结构示意图。图12所示sma马达12的部分结构相对图11所示sma马达12的部分结构不包括活动板1221。
217.sma马达12还包括防抖引入线125和防抖引出线126。防抖引入线125和防抖引出线126分别与sma线123电性连接,以形成闭环回路。可以理解的,防抖引入线125和防抖引出线126能够分别看作sma线123的正负极。示例性的,防抖引入线125和防抖引出线126均通过底板1211引出。如图11所示,底板1211设有第一避让口171。防抖引入线125和防抖引出线126自第一避让口171引出。
218.在本技术实施例中,防抖引入线125和防抖引出线126自底板1211引出,并与电路板电性连接,控制输入sma线123的电信号,以控制活动板1221的移动量补偿光路的偏移,实
现摄像模组10防抖的线路控制。
219.在一些实施例中,防抖引入线125的数量为多条。多条防抖引入线125一一对应地与多根sma线123电性连接,以控制通入每根sma线123的电流大小。示例性的,防抖引入线125包括第一线路1251、第二线路1252、第三线路1253及第四线路1254。第一线路1251与第一sma线1231电性连接,第二线路1252与第二sma线1232电性连接,第三线路1253与第三sma线1233电性连接,第四线路1254与第四sma线1234电性连接。
220.在一些实施例中,多条防抖引入线125位于活动板1221的同一侧,且均设于固定板1212。多条防抖引入线125设于固定板1212背离底板1211的一侧,并自底板1211引出。也即,多条防抖引入线125设于固定板1212面向活动板1221的一侧。防抖引出线126设于底板1211,并自底板1211引出。
221.在本技术实施例中,防抖引入线125与防抖引出线126分别位于固定板1212相背设置的两侧,避免固定板1212线路较多而增加线路设计的困难。
222.示例性的,第一固定爪1261、第二固定爪1262、第三固定爪1263和第四固定爪1264采用导电材料。第一线路1251连接第一固定爪1261,以实现第一线路1251与第一sma线1231电性连接。第二线路1252连接第二固定爪1262,以实现第二线路1252与第二sma线1232电性连接。第三线路1253连接第三固定爪1263,以实现第三线路1253与第三sma线1233电性连接。第四线路1254连接第四固定爪1264,以实现第四线路1254与第四sma线1234电性连接。
223.请继续参阅图11和图12,在一些实施例中,摄像模组10还包括副悬线127及与副悬线127连接的防抖连接线128。副悬线127的一端固定于底板1211,并连接设于底板1211的防抖引出线126。副悬线127的另一端固定连接活动部,并与防抖连接线128连接。副悬线127电线连接在防抖引出线126与sma线123之间。防抖连接线128电性连接在副悬线127与活动板1221之间。示例性的,防抖连接线128与活动板1221上的金属端子1280连接。
224.在一些实施例中,副悬线127和活动板1221均采用导电材料。每根sma线123均与活动板1221电性连接,以使多根sma线123通过活动板1221分别与副悬线127电性连接。其中,副悬线127一端固定于底板1211,并与防抖引出线126电性连接,以使多根sma线123通过活动板1221、防抖连接线128及副悬线127与防抖引出线126电性连接。
225.在本技术实施例中,多条防抖引入线125分别与多根sma线123电性连接,多根sma线123固定于采用导电材料的活动板1221,活动板1221通过防抖连接线128与副悬线127电性连接防抖引出线126,以实现了sma马达12中防抖线路的闭环回路。其中,多条防抖引入线125并联设置,最终通过活动板1221和副悬线127与防抖引出线126串联,节省了防抖引出线126的数量,有利于简化sma线的线路设计。
226.请一并参阅图11至图13,图13是图11所示结构的电路原理图。多条防抖引入线125一一对应地连接多根sma线123,多根sma线123并联设置,通过每根sma线123的电流大小能够不同,使得多根sma线123能够带动活动板1221沿不同方向移动。活动板1221采用导电材料,多根sma线123均与活动板1221电性连接,且活动板1221通过防抖连接线128及副悬线127,与位于底板1211的防抖引出线电性连接,使得多根sma线123中的电信号汇聚,并通过防抖引出线引出,以实现防抖的闭环回路。可以理解的,防抖引入线125、多根sma线123、活动板1221、防抖连接线128、副悬线127及防抖引出线126形成闭环回路。
227.请继续参阅图14,图14是图3所示sma马达12的再一部分结构示意图。副悬线127的
一端固定于底板1211,另一端固接于基座1223远离底板1211的一侧。防抖连接线128的部分结构嵌设于基座1223,不仅有利于摄像模组10的小型化,也避免了摄像模组10线路排布混乱。
228.在一些实施例中,副悬线127的延伸方向与悬线124的延伸方向相同,副悬线127采用与悬线124相同的材质,以使基座1223在sma线123作用力下移动时,副悬线127不会牵扯基座1223而干扰摄像模组10的防抖。在其他实施例中,副悬线127也能够为不对活动部122(基座1223)产生作用力的导线。
229.在一些实施例中,摄像模组10还包括与副悬线127对称排布的平衡悬线129。如图14所示,平衡悬线129与副悬线127分别位于基座1223相对设置的两个对角。平衡悬线129与副悬线127的延伸方向及长度相同,基座1223在sma线123的作用力下移动时,平衡悬线129与副悬线127受力相同。
230.在本技术实施例中,防抖引出线的数量为一个,仅需一个副悬线127实现防抖引入线与防抖引出线的电性连接。sma马达12在实现防抖的过程中,基座1223与副悬线127之间产生作用力,此时平衡悬线129与副悬线127对称排布,用于平衡副悬线127对基座1223的作用力,使得基座1223的受力均衡,从而有利于摄像模组10的防抖。
231.如图14所示,连接片1228固定于基座1223的侧边。连接片1228与第一驱动件1225(磁性体)分别位于基座1223不同的侧边。示例性的,两个磁性体分别固定于基座1223相对设置的两侧,连接片1228固定于两个磁性体之间。其中,连接片1228与第二驱动件1226(线圈)电性连接。示例性的,两个相对设置的线圈分别通过两个下簧片1220与连接片1228电性连接。
232.请一并参阅图14和图15,图15是图3所示摄像模组10的再一部分结构示意图。调焦组件1222还包括位置检测器1200。位置检测器1200位于连接片1228的内侧。位置检测器1200用于检测镜头相对固定部位置。示例性的,位置检测器1200通过检测磁场的变化来进行位置检测。
233.在一些实施例中,位置检测器1200和第二驱动件1226(线圈)均通过连接片1228与外部器件电连接,以简化调焦组件1222的电路设计。示例性的,位置检测器1200嵌设于基座1223,位置检测器1200与基座1223的空间复用,使得摄像模组10更小型化。在其他一些实施例中,位置检测器1200也能够设于其他位置,本技术并不限定。
234.在本实施例中,位置检测器1200与驱动芯片(driver ic)采用一体化芯片,通过共用电源与通讯的方式,减小了第二驱动件1226(线圈)与位置检测器1200引脚的数量。也即,位置检测器1200采用检测、驱动、控制一体化芯片(all in one)。其中,本领域技术人员能够根据实际需求对位置检测器1200进行设计,本技术并不限制位置检测器1200的具体驱动方式及其与第二驱动件1226(线圈)电气连接的方式等。
235.在一些实施例中,下簧片1220与第二驱动件1226(线圈)电性连接,且与连接片1228电性连接。在本技术实施例中,第二驱动件1226(线圈)通过下簧片1220与连接片1228电性连接,用于传递电信号至第二驱动件1226(线圈),以控制第二驱动件1226(线圈)的电流大小及方向,控制镜头11相对底板1211的位移量。示例性的,下簧片1220包括第一下簧片与第二下簧片。第一下簧片与第二下簧片分别与两个第二驱动件1226(线圈)电性连接,以使两个第二驱动件1226(线圈)的电流大小能够不同。
236.请一并参阅图15与图16,图16是图15所示摄像模组10的部分结构示意图。多根悬线124包括第一悬线1241、第二悬线1242、第三悬线1243和第四悬线1244。第一悬线1241与第二悬线1242在x轴方向上对称排布,第三悬线1243与第四悬线1244在x轴方向上对称排布,第一悬线1241与第四悬线1244在y轴方向上对称排布,第二悬线1242与第三悬线1243在y轴方向上对称排布;其中,x轴方向与y轴方向垂直。x轴方向与y轴方向均垂直于z轴方向,且均与z轴方向相交。其中,z轴方向为镜头的光轴方向。可以理解的,第一悬线1241、第二悬线1242、第三悬线1243和第四悬线1244分别位于基座1223四个对角位置。
237.在本技术实施例中,四根悬线124分别位于基座1223的四个对角位置,活动部122相对固定部121移动过程中,悬线124倾斜时的避让空间较多,有利于摄像模组10的小型化。
238.如图16所示,多个上簧片1229一一对应地连接多根悬线124。且多个上簧片1229在x轴方向上对称排布,且在y轴方向上对称排布。示例性的,多个上簧片1229包括第一上簧片1291、第二上簧片1292、第三上簧片1293和第四上簧片1294。第一上簧片1291连接第一悬线1241,第二上簧片1292连接第二悬线1242,第三上簧片1293连接第三悬线1243,第四上簧片1294连接第四悬线1244。
239.如图16所示,在一些实施例中,摄像模组10还包括多条调焦引线131。多条调焦引线131为sma马达12中的调焦引线,均与连接片1228电性连接。多条调焦引线131一一对应地与多根悬线124电性连接。其中,每根悬线124采用导电材料,使得每根悬线124与对应的调焦引线131电性连接。多个上簧片1229采用导电材料,并与连接片1228电性连接。示例性的,上簧片1229中的平直部与连接片1228连接,以实现上簧片1229与连接片1228的电性连接。
240.在本技术实施例中,sma马达12中的连接片1228通过多个上簧片1229、多根悬线124及多条调焦引线131与电路板电性连接,实现调焦线路的闭环回路,提高了摄像模组10的调焦速度。可以理解的,在本技术实施例中,sma马达12为闭环马达(close loop),通过多条调焦引线131、多根悬线124及多个上簧片1229与连接片1228电性连接,实现了信号的控制、响应、反馈与控制,生成了反馈信号,减少了镜头11来回移动的次数,从而提高了摄像模组10的调焦速度及降低了摄像模组10的功耗。
241.示例性的,多条调焦引线131包括第一调焦引线1311、第二调焦引线1312、第三调焦引线1313及第四调焦引线1314。第一调焦引线1311、第一悬线1241及第一上簧片1291依次连接。第二调焦引线1312、第二悬线1242及第二上簧片1292依次连接。第三调焦引线1313、第三悬线1243及第三上簧片1293依次连接。第四调焦引线1314、第四悬线1244及第四上簧片1294依次连接。且第一上簧片1291、第二上簧片1292、第三上簧片1293及第四上簧片1294均与连接片1228电性连接。
242.在本技术实施例中,多根悬线124及多个上簧片1229均采用导电材料,通过多根悬线124与多个上簧片1229实现调焦组件1222的闭环回路的电设计,无需额外增加引线,简化了调焦组件1222的电路设计,有利于摄像模组10的小型化。
243.如图16所示,在一些实施例中,底板1211设有与第一避让口171相背设置的第二避让口172。多条调焦引线131设于底板1211,且一一对应地接触多根悬线124。多条调焦引线131自第二避让口172引出。示例性的,位于底板1211上的多条调焦引线131和防抖引出线126通过刻蚀、半导体沉积工艺,嵌设于底板1211。多条调焦引线131和防抖引出线126也能够形成为柔性电路板,通过粘接的方式固定于底板1211,本技术并不限定多条调焦引线131
和防抖引出线126设于底板1211的方式。
244.在本技术实施例中,悬线124的一端固定于底板1211,多条调焦引线131设于底板1211,悬线124能够直接与位于底板1211的调焦引线131接触实现电连接,简化了悬线124与调焦引线131电连接的难度。并且,多条调焦引线131集成于底板1211,避免了引线杂乱而影响摄摄像模组10各部件的排布。
245.如图16所示,在一些实施例中,第一悬线1241及第二悬线1242与连接片1228位于基座1223的同侧,第三悬线1243及第四悬线1244与连接片1228相对设置。连接片1228位于基座1223的侧边。多个摄像模组10还包括两条闭环引线132。两条闭环引线132一一对应地与远离连接片1228的两根悬线124(第三悬线1243及第四悬线1244)电性连接。示例性的,其中一条闭环引线132连接在第三上簧片1293与连接片1228之间,另一条闭环引线132连接在第四上簧片1294与连接片1228之间。第一悬线1241及第二悬线1242靠近连接片1228,可分别通过第一上簧片1291与第二上簧片1292直接与连接片1228电性连接。
246.在本技术实施例中,四根悬线124分别位于基座1223的四个对角处,其中靠近连接片1228的连根悬线124(第一悬线1241及第二悬线1242)直接通过上簧片1229(第一上簧片1291与第二上簧片1292)与连接片1228连接,另外远离连接片1228的两根悬线124(第三悬线1243及第四悬线1244)通过两条闭环引线132与连接片1228连接。有利于电路的排布。
247.请一并参阅图15与图16,在一些实施例中,两条闭环引线132位于活动板1221远离底板1211的一侧。其中,基座1223固定于活动板1221,也即基座1223与活动板1221之间不设间隙。示例性的,两条闭环引线132嵌设于基座1223靠近活动板1221的一侧。
248.在本技术实施例中,两条闭环引线132嵌设于基座1223,避免摄像模组10中电路分布混乱,从而有利于摄像模组10各结构的排布。示例性的,两条闭环引线132在基座1223成型前至于模具中,使得两条闭环引线132与基座1223一体成型,减少工艺耗时,使得两条闭环引线132与基座1223的空间复用,避免两条闭环引线132干扰摄像模组10内部器件的排布,从而有利于摄像模组10的小型化。在其他实施例中,两条闭环引线132也能够位于基座1223的外侧或内侧,本技术对此并不限定。
249.其中,本技术并不限定摄像模组10在防抖过程中,sma马达12驱动镜头11或图像传感器15平移。例如,在本技术提供的摄像模组10在实施一中,电路板14和图像传感器位于sma马达12的下方,sma马达12驱动镜头11相对图像传感器,沿垂直于镜头11的光轴的平面移动为例来进行描写。在后文提供的摄像模组在实施例二及实施例三中,sma马达也能够驱动镜头与图像传感器一起,沿垂直于镜头的光轴的平面移动。或者,后文提供的摄像模组在实施例四、实施例五及实施例六中,sma马达驱动图像传感器相对镜头,沿垂直于镜头的光轴的平面移动。
250.请参阅图17和图18,图17是本技术实施例提供的摄像模组20在实施例二中的结构示意图;图18是图17所示摄像模组20的部分结构示意图。其中,图18所示摄像模组20相比图17所示摄像模组20不包括外壳。
251.以下主要描述本实施例与前述实施例的不同,本实施例与前述实施例相同的大部分内容不再赘述。例如,摄像模组20包括镜头21和sma马达22。sma马达22包括固定部221、活动部222、sma线223和多根悬线224。sma线223通电时产生收缩,带动活动部222相对固定部221平移。多根悬线224用于支撑活动部222,以将活动部222悬空地置于固定部221的上方,
避免活动部222相对固定部221移动时产生滑动摩擦力。示例性的,每根悬线224的一端笔直地固定于固定部221,另一端笔直地固定于活动部222。
252.如图17所示,摄像模组20包括外壳24、软硬结合板25和软性电路板26。外壳24固定于sma马达22底部的周缘,并围设在sma马达22的外侧。软硬结合板25与软性电路板26均用于引出sma马达22内部的走线。软性电路板26为能够弯折的柔性电路板。软性电路板26自外壳24的导通槽240引出,并与软硬结合板25连接。软硬结合板25用于电性连接电子设备的其他元器件,例如图形处理器。软硬结合板25是同时具备硬性电路板(printed circuit boards,pcb)与柔性电路板(flexible printed circuit boards,fpc)特性的电路板。
253.在本技术实施例中,sma马达22内部的走线一部分通过软性电路板26引出,另一部分通过软硬结合板25引出。例如,sma马达22内实现调焦的走线通过软性电路板26引出,sma马达22内实现防抖的走线通过软硬结合板25引出。
254.在其他实施例中,摄像模组20内部的走线也能够仅由软硬结合板25或软性电路板26引出,本技术对此并不限定。例如,摄像模组20的防抖信号与调焦信号集成于软硬结合板25;或者,活动部222不包括调焦组件,摄像模组20仅能够实现防抖,此时防抖信号通过软硬结合板25传输至摄像模组20的外部。
255.如图18所示,在一些实施例中,固定部221包括底板2211和固定于底板2211上的固定板2212。活动部222位于固定板2212的上方。镜头21位于活动部222的内部。sma线223的一端固定于固定板2212,另一端固定于活动部222。底板2211设有与sma线223电性连接的走线。软硬结合板25自底板2211引出至外壳24的外部,并与sma线223电性连接。软硬结合板25包括柔板部251及硬板部252。柔板部251的一端连接底板2211,另一端连接硬板部252。硬板部252用于与电子设备中的其他元器件进行绑定,以保证软硬结合板25与其他元器件连接的稳固性。
256.请一并参阅图18和图19,图19是图17所示摄像模组20的分解结构示意图。活动部222包括电路板2221、支架2222、基座2223及上簧片2224。支架2222固定于电路板2221的上方。基座2223固定于支架2222的上方。上簧片2224固定于基座2223的上方。示例性的,镜头21的部分结构收容于基座2223的内侧。每根悬线224的一端笔直地固定于底板2211,另一端笔直地固定于上簧片2224。其中,上簧片2224具有一定的弹性。图中上簧片2224的结构仅为示例,本技术对此并不限定。sma马达22响应电信号时,活动部222中的电路板2221、支架2222、基座2223及上簧片2224一起移动。
257.在本技术实施例中,每根悬线224的一端固定连接上簧片2224,在sma马达22响应电信号,驱动活动部222沿垂直于镜头21的光轴的平面移动时,上簧片2224能够为活动部222的移动提供缓冲力,使得活动部222的移动更加平稳。与此同时,sma线223断电后对活动部222没有驱动力,上簧片2224具有弹性带动活动部222与镜头21移回至初始位置,使得活动部222与镜头21复位。也即,多根悬线224与上簧片2224固定连接,解决了活动部222晃动异常与姿势差的问题。
258.在一些实施例中,软性电路板26自电路板2221引出至外壳24的外侧。软性电路板26的一端电性连接软硬结合板25,另一端电性连接电路板2221。软性电路板26设有形变余量。其中,软性电路板26设有形变余量,摄像模组20在工作状态时,软性电路板26的长度能够发生变化。
259.在本技术实施例中,sma线223通电收缩时带动活动部222中的电路板2221移动时,电路板2221对软性电路板26的作用力牵引软性电路板26移动,软性电路板26中的形变余量能够吸收此作用力产生的位移量,避免了固定于软硬结合板25一端的软性电路板26牵扯电路板26,而干扰活动部222的移动,从而有利于摄像模组20的防抖。
260.请继续参阅图19,本技术提供的摄像模组20在实施例二中,固定板2212呈板状。基座2223为中空结构,用于收容镜头21的至少部分结构。活动部222还包括活动板2225、图像传感器2226及滤光片2227。活动板2225用于连接sma线223。图像传感器2226与电路板2221电性连接。示例性的,图像传感器2226固定于电路板2221朝向镜头21的一侧。支架2222用于固定滤光片2227。软性电路板26的一端固定于电路板2221,并引出至外壳24的外部。软硬结合板25的一端固定于底板2211,并自底板2211引出。
261.在一些实施例中,电路板2221可以是一个硬性电路板,且设有电性连接软性电路板26的走线,此硬性电路板可以通过各种方法与活动板2225固定连接。与此同时,电路板2221上安装有各种元器件,例如图像传感器2226,通过工艺与软性电路板26电性连接,以使图像传感器2226中获取的信号通过软性电路板26及软硬结合板25传输至其他元器件。在其他一些实施例中,电路板2221也可以通过在基板上放置柔板和元器件,柔板通过工艺,例如引线焊接(wire bonding)实现与图像传感器2226的电信号连接,通过软性电路板26引出信号线。
262.本领域技术人员能够根据实际需求对电路板2221、软硬结合板25及软性电路板26进行设计,本技术并不限制电路板2221、软硬结合板25及软性电路板26的具体结构及形成工艺等。其中,软性电路板26与电路板2221能够为一体的结构,也可以与软性电路板26为两个不同的结构,本技术对此并不限定。
263.请一并参阅图18及图19,在一些实施例中,软性电路板26包括依次连接的第一弯折区261、第一平展区262和第二弯折区263。也即,第一平展区262连接在第一弯折区261与第二弯折区263之间。第一弯折区261连接在电路板2221与第一平展区262之间,第二弯折区263连接在第一平展区262与硬性电路板2221之间。
264.其中,第一弯折区261的延伸方向包括至少两个方向。第一弯折区261的延伸方向为第一弯折区261中走线排布的方向。第一弯折区261的延伸路程大于,第一弯折区261延伸方向相背设置的两端之间的距离。第二弯折区263的延伸方向包括至少两个方向。第二弯折区263的延伸方向为第二弯折区263中走线排布的方向。第二弯折区263的延伸路程大于,第二弯折区263延伸方向相背设置的两端之间的距离。示例性的,第一平展区262的延伸方向不变。当摄像模组20处于不工作状态时,第一弯折区261与第二弯折区263均呈弯曲状态,第一平展区262呈展平状态。
265.在本技术实施例中,软性电路板26通过设置第一弯折区261与第二弯折区263,使得软性电路板26具有形变余量。在其他实施例中,软性电路板26也能够仅通过设置一个弯折区形成形变余量。或者,第一平展区262的延伸方向也能够包括至少两个方向,第一弯折区261、第一平展区262和第二弯折区263均设有形变余量。本领域技术人员能够根据摄像模组20的实际需求,对软性电路板26设计形变余量,本技术对此并不限定。
266.如图19所示,在一些实施例中,第一平展区262包括相邻设置的第一侧边2621与第二侧边2622。示例性的,第一侧边2621与第二侧边2622垂直设置。在其他实施例中,第一侧
边2621与第二侧边2622形成的角度也能够为锐角或钝角,本技术对此并不限定。其中,第一弯折区261的一端固定连接电路板2221,另一端固定连接第一侧边2621。第二弯折区263的一端固定连接第二侧边2622,另一端用于固定于软硬结合板25。
267.在本技术实施例中,第一弯折区261与第二弯折区263分别位于第一平展区262的不同方向,软性电路板26具有不同方向的弯折余量,使得sma线223通电收缩带动活动部222沿不同方向移动时,软性电路板26能够吸收活动部222沿不同方向移动时对软性电路板26的作用力,有效地避免了软性电路板26牵扯活动部222而干扰摄像模组20的防抖。
268.请继续参阅图19,在一些实施例中,软硬结合板25包括第三弯折区253和第二平展区254。第三弯折区253的延伸方向包括至少两个方向。第三弯折区253的延伸方向为第三弯折区253中走线排布的方向。第三弯折区253的延伸路程大于,第三弯折区253延伸方向相背设置的两端之间的距离。当摄像模组20处于不工作状态时,第三弯折区253呈弯曲状态。第三弯折区253的一端固定连接底板2211,另一端连接第二平展区254。也即。第二平展区254连接于第三弯折区253远离底板2211的一端。软性电路板26能够固定于第二平展区254。
269.在本技术实施例中,软硬结合板25也设有第三弯折区253,使得软硬结合板25的长度能够发生变化,避免了摄像模组20在防抖过程中软硬结合板25牵扯活动部222,而干扰活动部222的移动,从而有利于摄像模组20的防抖。其中,第三弯折区253位于软硬结合板25中的软板部。第二平展区254可以位于软硬结合板25中的软板部,也可以位于软硬结合板25中的硬板部,本技术对此并不限定。
270.请参阅图20,图20是图17所示结构沿b-b线处的截面示意图。外壳24固定于底板2211。固定板2212安装于底板2211。活动部222悬空地位于固定板2212的上方。活动部222中的活动板2225面向固定部221。电路板2221及图像传感器2226固接于活动板2225d的上方。图像传感器2226位于镜头21的出光侧,且与电路板2221电性连接。支架2222固定于电路板2221的上方。基座2223固定于支架2222的上方。示例性的,基座2223与支架2222通过粘接层固定连接,此时基座2223与支架2222为不同的结构。在其他实施例中,基座2223与支架2222也能够一体成型,以节省摄像模组20的组装时间,本技术对此并不限定。
271.其中,镜头21位于基座2223的内侧,且与基座2223相连接。示例性的,承载镜头21的镜头载体与基座2223通过弹性连接件连接。可以理解的,电路板2221、图像传感器2226、基座2223及镜头21均位于活动板2225的上方,且随活动板2225一起相对固定部221移动。
272.在本技术实施例中,电路板2221、图像传感器2226和基座2223均相对活动板2225固定连接,且镜头21连接基座2223,sma线223响应电信号时带动图像传感器2226及镜头21一起,相对固定部221沿垂直于镜头21的光轴的平面移动,此时穿过镜头21的光线投射于图像传感器2226上的位置不变,有利于提高摄像模组20成像的解析度,从而提高摄像模组20成像的清晰度。与此同时,穿过镜头21的光线投射图像传感器2226上的位置固定,使得图像传感器2226设置较小的感光面即可满足成像需求,有利于减小图像传感器2226的体积。
273.如图20所示,在一些实施例中,电路板2221固定于活动板2225远离固定部221的一侧,图像传感器2226固定于电路板2221远离活动板2225的一侧,也即图像传感器2226、电路板2221及活动板2225依次堆叠设置。在此实施例中,图像传感器2226固定于电路板2221的表面,方便图像传感器2226与电路板2221的电性连接设计,有利于降低摄像模组20的成本。示例性的,电路板2221为硬性电路板2221,以保证图像传感器2226固定于电路板2221上的
稳定性。
274.在其他实施例中,图像传感器2226也能够至少部分结构嵌设于电路板2221,本技术对此并不限定。例如,电路板2221设有收容槽,图像传感器2226收容于收容槽,图像传感器2226与电路板2221的厚度空间上达到复用,有利于减小摄像模组20的厚度。
275.请继续参阅图20,滤光片2227固定于支架2222,与图像传感器2226相对设置且位于镜头21的出光侧。示例性的,支架2222设有用于固定滤光片2227的台阶结构,以稳固地固定滤光片2227。镜头21、滤光片2227、图像传感器2226及活动板2225沿镜头21的光轴方向依次堆叠设置。
276.在本技术实施例中,外界穿过镜头21的光线经过滤光片2227后照射于图像传感器2226上,滤光片2227能够过滤穿过镜头21光线中的杂光,使得摄像模组20拍摄的照片更加真实,从而提高摄像模组20的质量。
277.在一些实施例中,活动部222还包括调焦组件2228。示例性的,调焦组件2228位于基座2223的内侧。调焦组件2228用于驱动镜头21沿镜头21的光轴方向移动,改变镜头21与图像传感器2226之间的距离,从而实现摄像模组20的调焦。图20中调焦组件2228仅为示例,调焦组件2228的结构可参阅前述摄像模组20在实施例一中的相关描述,本技术在此不赘述。例如,调焦组件2228包括第一驱动件和第二驱动件,第一驱动件与第二驱动件通过磁力配合以驱动镜头21沿镜头21的光轴方向移动。在其他实施例中,活动部222也能够不包括调焦组件2228,本技术对此并不限定。
278.请一并参阅图18与图20,悬线224的一端固定于底板2211,另一端固定于上簧片2224。悬线224的延伸方向与镜头21的光轴方向相同。上簧片2224固定于基座2223远离底板2211的一侧。悬线224支撑在上簧片2224与底板2211之间,以将活动部222支撑于固定部221远离底板2211的一侧。示例性的,上簧片2224与外壳24间隔设置,为活动部222带动上簧片2224相对固定部221移动时提供避让空间,避免外壳24干扰活动部222的移动。
279.在本技术实施例中,多根悬线224支撑活动部222,避免多根sma线223承受活动部222的重量,而影响sma线223的性能。并且,具有弹性的上簧片2224连接在悬线224与基座2223之间,上簧片2224能够为活动部222的移动提供缓冲力,使得活动部222的移动更加平稳。与此同时,sma线223断电后对活动部222没有驱动力,上簧片2224能够带动活动部222与镜头21移回至初始位置,使得活动部222与镜头21复位,解决了活动部222晃动异常与姿势差的问题。
280.请继续参阅图21,图21是图20所示截面图的部分结构示意图。活动部222中的活动板2225面向固定板2212,且与固定板2212间隔设置。如图21所示,活动部222面向固定板2212的第一面2220,与固定板2212面向活动板2225的第二面2210之间不接触。可以理解的,悬线224的一端笔直地固定于固定板2212,另一端笔直地固定于活动部222,以将活动部222悬空地置于固定板2212的上方。
281.在本技术实施例中,多根悬线224悬空地将活动部222支撑于固定板2212的上方,固定板2212与活动板2225之间无需额外设置用于支撑活动部222的支撑件,使得活动部222相对固定部221沿垂直于镜头21的光轴的平面移动时,活动部222与固定部221之间不存在摩擦力,避免了电子设备处于不同位姿时对摄像模组20的驱动算法造成的难度。
282.请继续参阅图22,图22是图21所示摄像模组20的部分结构的俯视图。多根悬线224
在x轴方向上对称排布,且在y轴方向上对称排布。x轴方向与y轴方向垂直且相交。其中,x轴方向与y轴方向的交点经过镜头的光轴210方向。在本技术实施例中,多根悬线224对称地分布于活动部222的周缘,以平衡稳固地支撑活动部222。
283.示例性的,活动板2225大致呈矩形体,悬线224的数量为四根,四根悬线224分布于活动部222的四个对角处。如图22所示,多根悬线224包括第一悬线2241、第二悬线2242、第三悬线2243及第四悬线2244。第一悬线2241和第二悬线2242在x轴方向上对称排布,第三悬线2243和第四悬线2244在x轴方向上对称排布,第一悬线2241和第四悬线2244在y轴方向上对称排布,第二悬线2242和第三悬线2243在y轴方向上对称排布。在其他实施例中,四根悬线224也能够对称地分布于活动部222的其他位置,例如活动部222的四边,本技术对此并不限定。
284.在一些实施例中,sma线223的数量为四根。四根sma线223以镜头的光轴210旋转对称。sma线223与固定部221及活动板2225之间的连接关系可参阅前述实施例中对sma线的描写,在此不赘述。
285.在本技术实施例中,摄像模组20设置支撑活动部222的多根悬线224对称排布,摄像模组20处于不同位姿时,每根悬线224的弹性力相同,降低了驱动算法的控制难度。
286.请一并参阅图23和图24,图23是本技术实施例提供的摄像模组20在实施例三中的部分结构示意图;图24是图23所示结构的截面示意图。其中,图23所示摄像模组20不包括外壳。
287.本实施例三与实施例二相同的大部分内容不再赘述。例如,摄像模组20包括镜头21和sma马达22。sma马达22包括固定部221、活动部222、sma线223和多根悬线224。sma线223通电时产生收缩,带动活动部222相对固定部221平移。多根悬线224用于支撑活动部222,以将活动部222悬空地位于固定部221的上方,避免活动部222相对固定部221移动时产生滑动摩擦力。其中,活动部222包括电路板2221、图像传感器2226及固定镜头21的镜头载体。示例性的,每根悬线224的其中一端固定于活动部222中的上簧片2224。
288.如图23所示,在一些实施例中,摄像模组20还包括软硬结合板25。软硬结合板25自固定部221中的底板2211引出至外壳的外侧。软硬结合板25中的一端用于电性连接电子设备中的其他元器件,以传输摄像模组20内部的电信号。软硬结合板25不仅与sma线电性连接,也与活动部222中的线路电性连接,sma马达22内部的走线均通过软硬结合板与电子设备中的其他元器件电性连接。
289.在本技术实施例中,sma马达22中固定部221与活动部222中的线路均通过软硬结合板25引出至sma马达22(外壳)的外侧,减少了自sma马达22内部引出的电路板的数量,有利于摄像模组20的小型化。
290.如图24所示,活动部222还包括支架2222、基座2223、活动板2225、滤光片2227及调焦组件2228。活动板2225面向固定部221。电路板2221固定于活动板2225远离固定部221的一侧,图像传感器2226安装于电路板2221,并与电路板2221电性连接。支架2222安装于电路板2221,并用于固定于图像传感器2226相对设置的滤光片2227。基座2223固定于支架2222,并用于承载调焦组件2228。调焦组件2228响应电信号驱动镜头21沿镜头21的光轴方向移动,以实现调焦。
291.在本技术实施例三中,镜头21不仅能在sma线223的作用下沿垂直于镜头21的光轴
的平面移动,实现摄像模组20的防抖,而且能在调焦组件2228的作用下相对固定部221沿镜头21的光轴方向移动,实现摄像模组20的调焦,使得摄像模组20同时具备防抖与调焦,提高了摄像模组20的成像质量。在其他实施例中,sma马达22也能够仅驱动镜头21沿垂直于镜头21的光轴的平面移动,本技术对此并不限定。
292.请继续参阅图25和图26,图25是图24所示a部分的放大结构示意图;图26是图23所示摄像模组的部分结构示意图。
293.摄像模组20还包括软性电路板26。软性电路板26的一端固定于电路板2221的下方,另一端固定于底板2211。软性电路板26位于外壳的内侧,并电性连接电路板2221与软硬结合板25。软性电路板26用于将活动部222中的电信号与电子设备中的其他元器件电性连接。示例性的,调焦组件2228及图像传感器2226中的线路汇聚于电路板2221,并通过软性电路板26与软硬结合板25电性连接。
294.其中,电路板2221为硬性电路板,此硬性电路板可以通过各种方法与活动板2225固定连接。与此同时,电路板2221上安装有各种元器件,例如图像传感器2226,通过工艺与软性电路板26电性连接,以使图像传感器2226获取的信号通过软性电路板26及软硬结合板25传输至电子设备中的其他元器件。
295.在本技术实施例中,软性电路板26设有形变余量,能够吸收sma线223通电收缩时对软性电路板26的牵引力,避免了固定于软硬结合板25一端的软性电路板26牵扯电路板26,而干扰活动部222的移动,从而有利于摄像模组20的防抖。与此同时,软性电路板26位于sma马达22的内部,摄像模组20内部的电信号均通过硬性电路板与电子设备的其他元器件电性连接,避免外壳的外侧设用于传输活动部222中电信号的柔性电路板,使得电子设备内部无需设置供柔性电路板随活动部222移动时的形变空间,减小摄像模组20占用电子设备的内部空间,有利于电子设备的小型化。
296.在一些实施例中,sma马达22设有贯穿固定板2212与活动板2225的避让空间220。软性电路板26的一端固定连接底板2211,并通过避让空间220穿过固定板2212与活动板2225连接至电路板2221。其中,底板2211设有线路,通过工艺分别与软性电路板26及软硬结合板25电性连接。软性电路板26的一端固定连接电路板2221,另一端固定连接底板2211中的线路,以使软性电路板26电性连接电路板2221与软硬结合板25。
297.在本技术实施例中,sma马达22设有贯穿固定板2212与活动板2225的避让空间220,避让空间220不仅供柔性电路板穿过固定板2212与活动板2225,以实现电路板2221与软硬结合板25的电性连接,并且能够提供形变空间供软性电路板26在活动部221的作用下发生形变,使得柔性电路板的空间与sma马达22中内部的空间复用,从而有利于摄像模组20的小型化。
298.本领域技术人员能够根据实际需求对电路板2221、软硬结合板25及软性电路板26进行设计,本技术并不限制电路板2221、软硬结合板25及软性电路板26的具体结构及形成工艺等。
299.请参阅图27,图27是本技术实施例提供的摄像模组30在实施例四中的结构示意图。以下主要描述本实施例与前述实施例的不同,本实施例与前述实施例相同的大部分内容不再赘述。例如,sma马达包括固定部、活动部、sma线和多根悬线。sma线通电时产生收缩,带动活动部相对固定部平移。多根悬线用于将活动部悬空地置于固定部的上方,避免活动
部相对固定部移动时产生滑动摩擦力。其中,在本技术实施例四中,活动部包括图像传感器,且与镜头间隔设置。sma马达响应电信号时,驱动图像传感器相对镜头沿垂直于镜头的光轴的平面移动,以实现摄像模组的防抖。
300.如图27所示,摄像模组30包括底板3511、外壳32、镜头33和第二电路板34。底板3511用于固定连接电子设备内部的其他结构,以将摄像模组30稳固地固定于电子设备的内部。外壳32安装于底板3511,外壳32相对底板3511固定。外壳32用于保护位于外壳32内部的结构。示例性的,镜头33的主要部分收容于外壳32的内侧。第二电路板34的部分结构位于外壳32的外侧,用于与电子设备内部的其他元器件连接,以传输摄像模组30内部的电信号。
301.请参阅图28,图28是图27所示摄像模组30的部分结构示意图。摄像模组30还包括sma马达300。镜头33位于sma马达300的内侧。sma马达300可以用于实现摄像模组的防抖及调焦。示例性的,sma马达300包括sma组件35、调焦组件36、支架37和多根悬线38。sma组件35位于镜头33的出光侧。支架37位于sma组件35的上方,并与sma组件35间隔设置。镜头33位于支架37的内侧。调焦组件36安装于支架37。多根悬线38对称地位于支架37的周缘,且每根悬线38的一端笔直地固定于支架37,另一端笔直地固定于sma组件35。
302.在本技术实施例中,sma组件35用于实现摄像模组30的防抖,调焦组件36用于实现摄像模组30的调焦,也即摄像模组30中调焦功能与防抖功能由不同的结构驱动,有利于实现摄像模组30的大角度防抖。示例性的,调焦组件36与sma组件35的电信号最终通过第二电路板34,与电子设备的其他元器件进行传输。
303.请继续参阅图29,图29是图27所示摄像模组30的部分分解结构示意图。sma组件35包括固定部351、活动部352和sma线353。sma线353用于连接在固定部351与活动部352。sma线353的数量为多个。sma线353通电时产生收缩。其中,sma线353的材质可参阅前述实施例对sma线353的描述。示例性的,固定部351包括底板3511和固定板3512。活动部352包括活动板354、第一电路板355和图像传感器356。活动板354用于连接sma线353。图像传感器356是一种将光学图像转换成电信号的设备。其中,第一电路板355与图像传感器356电性连接,以传输图像传感器356的电信号。
304.示例性的,调焦组件36包括第一驱动件361、第二驱动件362、镜头载体363和簧片364。镜头载体363用于承载镜头33,簧片364用于连接镜头33与支架37。支架37包括支架本体371及顶板372。支架本体371能够用于承载第一驱动件361或第二驱动件362。顶板372能够固定于外壳32的内壁,以使支架37相对底板3511固定。
305.请一并参阅图30与图31,图30是图27所示摄像模组30的俯视图;图31是图30所示结构沿c-c线处的截面示意图。一些实施例中,支架37悬空地位于活动部352的上方,并相对固定部351固定连接。示例性的,支架37中的顶板372固接于外壳32的内壁,外壳32固定于底板3511的周缘,以使支架37相对固定部351固定。支架本体371固定于顶板372的下方,且支架本体371与活动部352间隔设置,以使支架37悬空地位于活动部352的上方。
306.其中,支架本体371面向活动部352中的第一电路板355,并与第一电路板355间隔设置。镜头载体363位于支架37的内侧。镜头33固定于镜头载体363的内侧。活动部352中的图像传感器356位于镜头33的出光侧。外界的光线穿过镜头33后落入到图像传感器356的感光面,在图像传感器356上成像。
307.在本技术实施例中,支架本体371与顶板372固定连接,且支架本体371与活动部
352间隔设置,sma线353响应电信号时,仅带动活动部352(活动板354、第一电路板355和图像传感器356)沿垂直于镜头33的光轴的平面移动来实现防抖,无需带动镜头33、镜头载体363和支架37移动,活动部352的负载较小,从而有利于摄像模组30的防抖功耗。与此同时,由于镜头33对光线的聚集作用,相较于传统的移动镜头33进行防抖的方案,本实施例的sma马达驱动图像传感器356进行光路补偿所需要的补偿平移距离(即行程)更短,进一步降低了摄像模组30的功耗。
308.在其他实施例中,支架本体371也能够与顶板372间隔设置,且支架本体371固定于活动部352,使得sma线353响应电信号时,带动图像传感器356与镜头33一起相对固定部351移动,来实现防抖。本技术并不限定,sma线353响应电信号时,带动图像传感器356移动,还是带动镜头33移动,或者带动图像传感器356与镜头33一起移动。
309.其中,在本技术实施例中,支架本体371与顶板372为不同的结构,方便调焦组件安装于支架本体371。示例性的,顶板372能够通过紧固件固定于支架本体371,也能够通过粘接层固定于支架本体371,本技术对此并不限定。在其他实施例中,顶板372与支架本体371也能够为一体结构,本技术对此并不限定。
310.如图31所示,在一些实施例中,第一电路板355固定于活动板354的上方。图像传感器356安装于第一电路板355。示例性的,图像传感器356固定于第一电路板355的上方。可以理解的,图像传感器356通过第一电路板355间接地固接于活动板354。
311.在本技术实施例中,图像传感器356通过第一电路板355固接于活动板354朝向镜头33的一侧,不仅使得图像传感器356相对活动板354固定,而且方便图像传感器356与第一电路板355的电性连接设计。在其他实施例中,图像传感器356的至少部分结构也能够嵌设于第一电路板355,以减小摄像模组30的厚度。本技术对图像传感器356与电路板的安装方式并不限定。
312.在一些实施例中,摄像模组30还包括位于镜头33与图像传感器356之间的滤光片39。滤光片39与图像传感器356相对设置。滤光片39能够过滤穿过镜头33光线中的杂光,使得摄像模组30拍摄的照片更加真实,从而提高摄像模组30的质量。示例性的,滤光片39固定于支架37的底部,无需增设额外固定滤光片39的底座,有利于摄像模组30的小型化。
313.请一并参阅图32与图33,图32是图31所示b部分的放大结构示意图;图33是图28所示摄像模组30的部分结构示意图。活动部352悬空地位于固定部351的上方。活动部352中的活动板354面向固定部351,且与固定部351间隔设置。每根悬线38的一端笔直地固定于活动部352,另一端笔直地固定于支架37。多根悬线38对称地设于支架37的周缘。示例性的,多根悬线38固定于顶板371的周缘,并位于支架本体371的周边。可以理解的,多根悬线38悬吊活动部352,使得活动部352与固定部351能够间隔设置。
314.在本技术实施例中,活动部352与固定部351间隔设置,固定板3512与活动板354之间无需额外设置用于支撑活动部352的支撑件,活动部352相对固定部351沿垂直于镜头33的光轴的平面移动时,活动部352与固定部351之间不存在摩擦力,避免了电子设备处于不同位姿时对摄像模组30的驱动算法造成的难度。
315.在一些实施例中,每根sma线353的一端固定于固定部351,另一端固定于活动板354。sma线353通电加热产生收缩,多根sma线353共同的作用力带动活动板354、第一电路板355及图像传感器356一起,相对固定部351沿垂直于镜头33的光轴的平面移动。第一电路板
355与图像传感器356均与支架37间隔设置。也即,活动部352与支架37间隔设置。
316.在本技术实施例中,活动部352与支架37间隔设置,sma线353通电加热产生收缩,多根sma线353共同的作用力仅需带动活动板354、第一电路板355及图像传感器356移动,无需带动较重的镜头33,有利于降低摄像模组30的防抖功耗。
317.请继续参阅图32与图33,活动部352悬空地位于固定部351的上方,且支架37悬空地位于活动部352的上方。多根悬线38悬吊活动部352,以使活动部352悬空地位于固定部351的上方。示例性的,每根悬线38的一端固定于第一电路板355,另一端固定于顶板372。顶板372设有固定多根悬线38的多个限位部3720。多个限位部3720与多根悬线38一一对应。
318.在本技术实施例中,sma线353断电后对活动部352没有作用力,多根悬线38支撑活动部352,sma线353断电后活动部352仍然能够与固定部351间隔设置,使得活动部352相对固定部351的初始位置相同。
319.其中,在本技术实施例中,活动部352仅包括活动板354、电路板及图像传感器356,活动部352的重量较小,当sma线353断电后,活动部352能够通过悬线38自身的作用力恢复到初始位置,无需额外设置用于复位的簧片364。在其他实施例中,悬线38靠近支架37的一端与能够与簧片连接,活动部352通过簧片364复位。本技术并不限定,活动部352复位的方式。
320.与此同时,每根悬线38的一端固定于活动部352,另一端固定于远离支架37中远离活动部352一侧的顶板372,每根悬线38均垂直于活动部352,每根悬线38的受力相同,使得多根悬线38稳固地支撑活动部352。
321.结合图28和图33,在一些实施例中,固定部351包括多条控制引线。多条控制引线一一对应地连接多条sma线353,用于控制通入各条sma线353的电流大小,以控制活动板354相对固定部351的偏移量。示例性的,多条控制引线固定于第二电路板34,避免第一电路板355的移动牵扯控制引线,从而保证了控制引线与第二电路板34电性连接的稳固性。
322.请继续参阅图33与图34,图34是图28所示摄像模组30的又一部分结构示意图。在一些实施例中,第二电路板34包括第一部分341及与第一部分341连接的第二部分342。第一部分341固定于固定部351,且与第一电路板355间隔设置。示例性的,第一部分341环绕在第一电路板355的四周,也即,第一电路板355位于第一部分341的内侧。第二部分342位于第一部分341远离第一电路板355的一侧,且延伸至底板3511的外部。结合图33与图34,第一部分341位于外壳32的内侧,第二部分342位于外壳32的外侧。示例性的,第一部分341位于外壳32的内部,方便与sma线电性连接。
323.在本技术实施例中,第二电路板34包括第一部分341及自第一部分341引出至外壳外侧的第二部分342,第一部分341能够用于电性连接调焦组件中的线路,第二部分342用于将摄像模组与电子设备中的其他元器件电性连接。
324.在一些实施例中,摄像模组30还包括柔性连接件310。柔性连接件310电性连接在第一电路板355与第一部分341之间。其中,柔性连接件310能够弯折。
325.在本技术实施例中,第一电路板355通过柔性连接件310与第二电路板34连接,以实现第一电路板355与电子设备外部的元器件的电连接。摄像模组30在防抖过程中,sma线353在相应电信号带动第一电路板355移动,柔性连接件310能够弯折,柔性连接件310能够吸收第一电路板355的移动,避免第二电路板34牵扯第一电路板355而影响摄像模组30的防
抖。
326.在一些实施例中,第二部分342的一端固接于底板3511,另一端用于固定连接电子设备中的其他元器件。示例性的,第二部分342为硬性电路板。多根sma线353的引出端固定于第二电路板34。在本技术实施例中,第二电路板34相对底板3511固定连接,使得多根sma线353的引出端能够稳固地固定于第二电路板34,避免第二电路板34在第一电路板355的带动下移动,而影响多根sma线353的引出端与第二电路板34的稳固性。
327.在本技术实施例中,柔性连接件310与第一电路板355及第二电路板34为不同的结构。在其他实施例中,柔性连接件310也能够与第一电路板355为一体结构,本技术对此并不限定。例如,第一电路板355包括基板及位于基板上的柔性电路板,此柔性电路板与柔性连接件310一体成型。
328.如图34所示,在一些实施例中,第一部分341为中空结构,第一电路板355位于第一部分341的内侧。柔性连接件310的数量为多个。每个柔性连接件310的一端固定于第一电路板355,另一端固定于第一部分341。第一电路板355中的多条走线通过多个柔性连接件310分别传输至第二电路板34。多个柔性连接件310分布于第一电路板355的周边,充分利用第一电路板355与第一部分341四周的间隙,有利于摄像模组30的小型化。
329.在本技术实施例中,第一电路板355中的走线通过多个柔性连接件310引出,每个柔性连接件310分担第一电路板355中的一部分走线,使得每个柔性连接件310的宽度较薄,减小了第一电路板355与第一部分341之间间隙的宽度,从而有利于摄像模组30的小型化。并且,在柔性连接件310长度一定的基础上,柔性连接件310的宽度较薄,有利于提高了柔性连接件310的弯折性能,从而避免了柔性连接件310干扰第一电路板355的移动。可以理解的,单个柔性连接件310分担第一电路板355中引出的走线时,柔性连接件310需要较宽的宽度才能将第一电路板355中的全部走线引出,此时第一电路板355与第一部分341需要较宽的间隙。
330.请继续参阅图35,图35是图34所示结构的俯视图。多个柔性连接件310对称地分布于第一电路板355。示例性的,第一电路板355大致呈矩形。多个柔性连接件310在x轴方向上对称排布,且在y轴方向上对称排布。x轴方向与y轴方向垂直且相交。其中,x轴方向与y轴方向的交点经过镜头的光轴330方向。多个柔性连接件310能够中心对称排布,也能够轴对称排布,本技术对此并不限定。如图35所示,柔性连接件310的数量为四个,四个柔性连接件310中心对称。在其他实施例中,柔性连接件310的数量也可以为2个、3个、6个或8个,本技术对此并不限定。第一电路板355的形状本技术也不限定。
331.在本技术实施例中,多个柔性连接件310对称排布,sma线353收缩带动第一电路板355移动时,每个柔性连接件310受力均衡,避免每个柔性连接件310受力不均衡而干扰活动部352的移动,从而提高了摄像模组30的防抖性能。
332.请继续参阅图36,图36是图28所示摄像模组30在另一角度的结构示意图。在一些实施例中,支架本体371设有固定于第一部分341的引出端子3710。引出端子3710用于将调焦组件36中的线路引出,并与第二电路板34电性连接。示例性的,调焦组件36中的引线嵌设于支架本体371,不仅避免引线排布混乱而影响摄像模组30的组装,也有利于摄像模组30的小型化。
333.在本技术实施例中,第一部分341相对底板3511固定,引出端子3710固定于第一部
分341,使得引出端子3710相对底板3511固定连接,避免了引出端子3710固定于第一电路板355时,第一电路板355的移动牵扯引出端子3710,从而提高了引出端子3710与第二电路板34电性连接的稳固性。在其他实施例中,调焦组件36中的引线也能够与第一电路板355实现电性连接,本技术对此并不限定。例如,支架本体371固定于第一电路板355,支架本体371相对第一电路板355固定。
334.请继续参阅图37,图37是图30所示结构沿d-d线处的截面示意图。在一些实施例中,第一驱动件361固定于支架本体371。第二驱动件362固定于镜头载体363的外侧,且与第一驱动件361相对设置。图像传感器356位于镜头33的出光侧。
335.在一些实施例中,第二驱动件362或第一驱动件361响应电信号时,第二驱动件362与第一驱动件361之间形成磁场效应,驱动镜头33沿镜头33的光轴方向移动。在本技术实施例中,第一驱动件361固定于支架37,第二驱动件362与第一驱动件361之间形成磁场效应时,第二驱动件362带动镜头载体363与镜头33一起沿镜头33的光轴方向移动,以改变镜头33与图像传感器356之间的距离,实现摄像模组30的调焦。
336.在一些实施例中,簧片364的一端固定于顶板372,另一端固定于镜头载体363。其中,簧片364具有弹性,不受外力时能够恢复形变。在本技术实施例中,簧片364连接在顶板372与镜头载体363之间,当第二驱动件1226与第一驱动件1225之间形成磁场效应,驱动镜头33与镜头载体363一起移动时,簧片364具有弹性能够为镜头33与镜头载体363的移动提供缓冲力,避免镜头33突然沿镜头的光轴330方向移动,使得镜头33的移动更加平稳。与此同时,第二驱动件362与第一驱动件361对镜头33与镜头载体363没有驱动力时,簧片364发生形变后具有恢复形变的能力,簧片364带动镜头33移回至初始位置,使得镜头33复位。
337.其中,第一驱动件361与第二驱动件362的相关描述能够参阅前述实施例中对第一驱动件361与第二驱动件362的描述。示例性的,第一驱动件361为磁性体,第二驱动件362为线圈。其中,磁性体与线圈的数量分别为两个,且分别位于镜头相对设置的两侧。结合图35与图37,图35所示截面中不包含磁性体,图37所示另一截面图中包含两个相对设置的磁性体。
338.请参阅图38和图39,图38是本技术实施例提供的摄像模组30在实施例五中的结构示意图;图39是图38所示摄像模组30的部分结构示意图。其中,图39所示摄像模组30不包括外壳32。
339.以下主要描述本实施例与前述实施例四的不同,本实施例与实施例四相同的大部分内容不再赘述。例如,sma马达包括固定部、活动部、sma线、支架和多根悬线。sma线通电时产生收缩,带动活动部相对固定部平移。多根悬线用于将活动部悬空地置于固定部的上方,避免活动部相对固定部移动时产生滑动摩擦力。活动部包括图像传感器,且与镜头间隔设置。sma马达响应电信号时,驱动图像传感器相对镜头沿垂直于镜头的光轴的平面移动,以实现摄像模组的防抖。
340.如图38所示,在一些实施例中,摄像模组30包括外壳32、镜头33、第一电路板355和第二电路板34。镜头33位于外壳32的内侧。第一电路板355和第二电路板34均用于引出摄像模组30内部的走线。第一电路板355为能够弯折的柔性电路板,也即第一电路板355具有弯折余量。第一电路板355自外壳32的导通槽320引出,并与第二电路板34连接。第二电路板34用于电性连接电子设备的其他元器件,例如图形处理器。第二电路板34是同时具备硬性电
路板(printed circuit boards,pcb)与柔性电路板(flexible printed circuit boards,fpc)特性的电路板。
341.在本技术实施例中,摄像模组30内部的走线一部分通过第一电路板355引出,另一部分通过第二电路板34引出,有利于摄像模组30内部走线的排布。
342.如图39所示,摄像模组30还包括sma组件35、调焦组件36、支架37和多根悬线38。sma组件35位于镜头33的下方,并用于实现摄像模组30的防抖。支架37位于sma组件35的上方。多根悬线38固定连接在sma组件35与支架37之间。调焦组件36安装于支架37,且位于镜头33的外侧。示例性的,第一电路板355自sma组件35引出至外壳32的外侧,以传输或输送sma组件35内部的线路至摄像模组30的外部。调焦组件36位于sma组件35的上方,并位于镜头33的周缘。调焦组件36用于驱动镜头33沿镜头33的光轴方向移动,以实现摄像模组30的调焦。
343.请一并参阅图39和图40,图40是图38所示摄像模组30的截面示意图。sma组件35包括固定部351和活动部352。固定部351包括底板3511和安装于底板3511的固定板3512。活动部352包括活动板354、第一电路板355和图像传感器356。支架37悬空地位于活动部352的上方,并相对固定部351固定连接。示例性的,支架37固接于外壳32的内壁,外壳32固定于固定部351的周缘,以使支架37相对固定部351固定。其中,支架37面向第一电路板355,并与第一电路板355间隔设置。图像传感器356安装于第一电路板355上,并位于镜头33的出光侧。外界的光线穿过镜头33后落入到图像传感器356的感光面,在图像传感器356上成像。
344.在本技术实施例中,支架37及镜头33悬空地位于活动部352的上方,sma线353响应电信号时,仅带动活动部352(活动板354、第一电路板355和图像传感器356)沿垂直于镜头33的光轴的平面移动来实现防抖,无需带动镜头33和支架37移动,活动部352的负载较小,从而有利于摄像模组30的防抖功耗。与此同时,由于镜头33对光线的聚集作用,相较于传统的移动镜头33进行防抖的方案,本实施例的sma组件35驱动图像传感器356进行光路补偿所需要的补偿平移距离(即行程)更短,进一步降低了摄像模组30的功耗。
345.在一些实施例中,第一电路板355包括硬板部3551及与硬板部连接的软板部3552。硬板部3551固定于活动板354的上方。图像传感器356及悬线38安装于硬板部3551,以保证摄像模组30结构的稳定性。软板部3552自硬板部3551引出至外壳32的外侧,并与第二电路板34电性连接。其中,软板部3552设有弯折余量,第一电路板355在sma组件35中sma线的作用下移动时,软板部3552弯折变形避免第二电路板34移动。
346.在本技术实施例中,sma组件35中的sma线通电时产生收缩,带动活动板354、硬板部3551和图像传感器356一起相对固定部351平移以实现摄像模组30的防抖。与此同时,软板部3552设有弯折余量,sma线对活动部352产生作用力时,弯折余量能够吸收sma线作用力对其产生的位移量,避免固定于第二电路板34一端的软板部3552牵扯硬板部3551的移动,从而有利于摄像模组30的防抖。
347.在本技术实施例中,第一电路板355包括用于安装图像传感器356的硬板部3551,及位于外壳32外侧的软板部3552,软板部3552能够弯折变形,避免第一电路板355在sma线的作用下移动时带动第二电路板34,从而保证了第二电路板34与电子设备中其他的元器件连接的稳固性。其中,硬板部3551与软板部3552能够一体成型,也能够为不同的结构通过工艺连接,本技术对此并不限定。本领域技术人员能够根据实际需设计硬板部3551与软板部
3552。
348.请继续参阅图39和图40,在一些实施例中,第二电路板34包括第一部分341及与第一部分341连接的第二部分342。第一部分341位于第一电路板355的周边,且与第一电路板355间隔设置。示例性的,第一部分341环绕在硬板部3551的四周,也即,硬板部3551位于第一部分341的内侧。第一部分341位于外壳32的内部,方便与sma线电性连接。第二部分342用于将摄像模组与电子设备中的其他元器件电性连接。
349.在本技术实施例中,第二电路板34包括第一部分341及自第一部分341引出至外壳外侧的第二部分342,第一部分341能够用于电性连接sma线及调焦组件中的线路,此时底板3511无需设计复杂的线路,有利于简化摄像模组30中电路设计。
350.请继续参阅图41和图42,图41是本技术实施例提供的摄像模组30在实施例六中的结构示意图;图42是图41所示摄像模组30的部分截面示意图。其中,图41所示摄像模组30不包括外壳。
351.以下主要描述本实施例与前述实施例五的不同,本实施例与实施例五相同的大部分内容不再赘述。例如,sma马达包括固定部351、活动部352、sma线353、支架37和多根悬线38。sma线353通电时产生收缩,带动活动部352相对固定部351平移。多根悬线38固定连接支架37,用于将活动部352悬空地置于固定部351的上方,避免活动部352相对固定部351移动时产生滑动摩擦力。活动部352包括图像传感器,且与镜头间隔设置。sma马达响应电信号时,驱动图像传感器相对镜头沿垂直于镜头的光轴的平面移动,以实现摄像模组的防抖。
352.如图41所示,固定部351包括底板3511及安装于底板3511的固定板3512。sma线353的一端固定于固定板3512,另一端固定于活动部352。第二电路板34自底板3511引出至外壳的外侧。第一电路板355包括硬板部3551及与硬板部连接的软板部3552。硬板部3551固定于活动板354的上方。图像传感器356及悬线38安装于硬板部3551,以保证摄像模组30结构的稳定性。软板部3552自硬板部3551引出至外壳32的外侧,并与第二电路板34电性连接。其中,软板部3552设有弯折余量,第一电路板355在sma组件35中sma线的作用下移动时,软板部3552弯折变形避免第二电路板34移动。
353.在本技术实施例中,摄像模组30内部的走线一部分通过第一电路板355引出至外壳的外侧,另一部分通过第二电路板34引出至外壳的外侧,有利于摄像模组30内部走线的排布。
354.请继续参阅图41和图43,图43是图41所示摄像模组30的部分结构示意图。在此实施例中,底板3511设有走线3510。走线3510与sma线353电性连接。图43所示走线3510仅为示例,本技术并不限定走线3510的排布。本领域技术人员能够根据实际需求设计走线3510的排布。
355.示例性的,位于底板3511上的走线3510通过刻蚀、半导体沉积工艺,嵌设于底板3511。走线3510也能够形成为柔性电路板,通过粘接的方式固定于底板3511,本技术并不限定走线3510设于底板3511的方式。其中,第二电路板34与走线3510连接,且第二电路板34自底板引出,并延伸至外壳的外侧。第二电路板34用于与电子设备内部的其他元器件电性连接。
356.在本技术实施例中,通过工艺在底板3511上形成与sma线353电性连接的走线3510,走线3510集成于底板3511上,减小了摄像模组中电路板的设计。
357.其中,活动部352中的第一电路板355的结构能够参阅前述实施例五中对第一电路板355的描述,本技术在此不再赘述。例如,第一电路板355包括硬板部3551及与硬板部连接的软板部3552。软板部设有弯折余量,第一电路板355在sma组件35中sma线353的作用下移动时,软板部弯折变形避免第二电路板34移动。
358.以上,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
