1.本发明属于轨道交通列车运行控制技术领域,特别涉及一种用于转辙机的控制装置及方法。
背景技术:
2.转辙机作为轨道交通道岔切换、锁闭的核心设备,其可靠性对铁路的行车安全和运输效率会产生重要影响,目前铁路信号控制系统大多采用集中控制方式对转辙机进行控制,集中控制方式存在信号缆敷设长度受限、不易维护、成本高昂等缺点。现有转辙机的驱动模块(控制装置)大部分采用继电器和安全与控制方式进行输出,而继电器易受环境影响,长时间工作会出现节点老化、粘连等故障,不宜在室外控制设备中使用,且传统安全与电路结构复杂。
3.因此,需要设计一种用于转辙机的控制装置及方法,从而在无需继电器和安全与的情况下,对转辙机进行驱动,以解决上述技术问题。
技术实现要素:
4.针对上述问题,本发明提供了一种用于转辙机的控制装置,所述控制装置包括:轨旁电源变换模块,用于将轨旁的交流电转换为第一直流电;逻辑控制模块,用于发出第一控制信号以及第二控制信号;第一级控制模块,用于根据第一控制信号,将第一直流电转换为脉冲信号;隔离升压模块,用于根据脉冲信号,输出母线电压;第二级控制模块,用于根据第二控制信号,将母线电压转换为转辙机的工作电压。
5.进一步地,所述轨旁电源变换模块包括:电源单元,用于将轨旁的交流电转换为第二直流电;强电转换单元,用于将第二直流电转换为第一直流电。
6.进一步地,所述逻辑控制模块还用于发出第三控制信号以及第四控制信号。
7.进一步地,所述控制装置还包括采集模块,所述采集模块包括:位置采集单元,用于根据第三控制信号或第四控制信号,采集转辙机的定位电流信号或反位电流信号;采集输入单元,用于将定位电流信号或反位电流信号传输给逻辑控制模块。
8.进一步地,所述采集输入单元还用于采集母线电压的信号、母线电流的信号以及转辙机的工作电压信号,并将母线电压信号、母线电流的信号以及转辙机的工作电压信号传输给逻辑控制模块。
9.进一步地,所述逻辑控制模块包括:第一安全cpu,用于发出第一控制信号和第三控制信号;第二安全cpu,用于发出第二控制信号和第四控制信号。
10.进一步地,
所述第一安全cpu还用于发出第五控制信号;所述第二安全cpu还用于发出第六控制信号。
11.进一步地,所述逻辑控制模块还包括安全电源转换电路,所述安全电源转换电路用于根据第五控制信号以及第六控制信号,为第一级控制模块提供驱动电压。
12.进一步地,所述采集输入单元包括第一ad采集电路、第二ad采集电路、第一隔离运放电路以及第二隔离运放电路,其中,所述第一隔离运放电路与第一ad采集电路连接,所述转辙机的定位电流信号或反位电流信号、母线电压的信号、母线电流的信号以及转辙机的工作电压信号在经过第一隔离运放电路后,通过第一ad采集电路传输给第一安全cpu;所述第二隔离运放电路与第二ad采集电路连接,所述转辙机的定位电流信号或反位电流信号、母线电压的信号、母线电流的信号以及转辙机的工作电压信号在经过第二隔离运放电路后,通过第二ad采集电路传输给第二安全cpu。
13.进一步地,所述电源单元包括电源转换电路以及整流电路,其中,轨旁的交流电在经过电源转换电路转换后,输出为第三直流电;轨旁的交流电在经过整流电路整流后,输出第二直流电。
14.进一步地,所述强电转换单元包括软启动电路以及pfc电压转换电路,其中,第二直流电在依次经过软启动电路以及pfc电压转换电路后,输出第一直流电。
15.进一步地,所述第一级控制模块包括第一光耦电路、第一级驱动电路以及高频逆变电路,其中,所述第一控制信号在通过第一光耦电路和第一级驱动电路后输出第一驱动信号至高频逆变电路;所述高频逆变电路根据第一驱动信号,将第一直流电转换为脉冲信号。
16.进一步地,所述第二级控制模块包括第二光耦电路、第二级驱动电路以及逆变电路,其中,所述第二控制信号在通过第二光耦电路和第二级驱动电路后输出第二驱动信号至逆变电路;所述逆变电路根据第二驱动信号,将母线电压转换为转辙机的工作电压。
17.进一步地,当第一级控制模块和隔离升压模块均正常输出时,第二级控制模块能根据第二控制信号,将母线电压转换为转辙机的工作电压。
18.进一步地,所述隔离升压模块包括高频变压器以及高频整流电路,所述高频变压器与高频整流电路连接,其中,所述脉冲信号在通过高频变压器进行电压变换后,经高频整流电路整流后输出母线电压。
19.一方面,本发明还提供一种用于转辙机的控制方法,所述控制方法包括:通过轨旁电源变换模块将轨旁的交流电转换为第一直流电;通过逻辑控制模块发出第一控制信号以及第二控制信号;根据第一控制信号,通过第一级控制模块将第一直流电转换为脉冲信号;根据脉冲信号,通过隔离升压模块输出母线电压;
根据第二控制信号,通过第二级控制模块将母线电压转换为转辙机的工作电压。
20.进一步地,所述第一级控制模块包括第一光耦电路、第一级驱动电路以及高频逆变电路,其中,所述第一控制信号在通过第一光耦电路和第一级驱动电路后输出第一驱动信号至高频逆变电路;所述高频逆变电路根据第一驱动信号,将第一直流电转换为脉冲信号。
21.进一步地,所述第二级控制模块包括第二光耦电路、第二级驱动电路以及逆变电路,其中,所述第二控制信号在通过第二光耦电路和第二级驱动电路后输出第二驱动信号至逆变电路;所述逆变电路根据第二驱动信号,将母线电压转换为转辙机的工作电压。
22.另一方面,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质存储有程序,所述程序可被处理器执行,以实现上述的一种用于转辙机的控制方法。
23.本发明提供了一种用于转辙机的控制装置及方法,所述控制装置位于室外轨道附近,采用就地取电(轨旁的交流电)并利用电力变换的方式进行输出,可实现对转辙机的状态采集(定位和反位)与控制(将母线电压转换为转辙机的工作电压)。
24.本发明的控制装置采用无继电器控制方式进行输出,通过电力电子器件搭建的第一级控制模块和第二级控制模块,可实现两级控制模块完全隔离,实现两级控制模块的高压类“安全与”控制。当任一级控制模块异常时,可保证导向安全侧、本控制装置无输出、转辙机无动作。
25.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所指出的结构来实现和获得。
附图说明
26.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一个简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
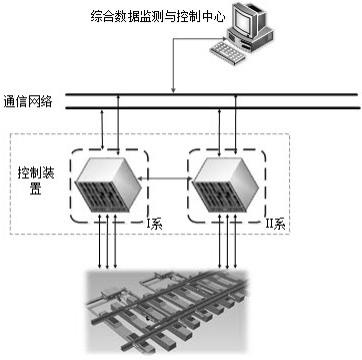
27.图1示出了根据本发明实施例控制装置采用通信网络的冗余通信方式与室内综合数据监测与控制中心进行信息传输的示意图。
28.图2示出了根据本发明实施例的控制装置的结构示意图。
29.图3示出了根据本发明实施例的第一控制模块以及第二级控制模块的结构示意图。
30.图4示出了根据本发明实施例的采集模块的结构示意图。
具体实施方式
31.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地说明,显然,所描述的实施例是
本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.如图1所示的,本发明提供了一种用于转辙机的控制装置,整个控制装置具备区域联锁控制功能(即通过综合数据检测与控制中心对指定区域内的轨旁的转辙机进行控制),如图1所示,采用通信网络的冗余通信方式与室内综合数据监测与控制中心进行信息传输。通过采用两个控制装置组成的主备系运行方式,实现驱动和采集硬件电路“二乘二”结构设计,且双系(即两个控制装置,其中一个控制装置作为i系,另一个控制装置作为ii系,其中,i系可作为主系,ii系可作为备系;也可以是i系作为备系,ii系作为主系)之间通过实时数据交互,可保证当主系工作异常时,切换到备系运行,同时将故障信息上传至室内综合数据监测与控制中心。
33.如图2所示,所述控制装置包括:轨旁电源变换模块,用于将轨旁的交流电转换为第一直流电;逻辑控制模块,用于发出第一控制信号以及第二控制信号;第一级控制模块,用于根据第一控制信号,将第一直流电转换为脉冲信号;隔离升压模块,用于根据脉冲信号,输出母线电压;第二级控制模块,用于根据第二控制信号,将母线电压转换为转辙机的工作电压。
34.另外,本发明中,所述控制装置还包括采集模块。
35.下面对于轨旁电源变换模块、逻辑控制模块、第一级控制模块、隔离升压模块、第二级控制模块以及采集模块进行一个详细地说明。
36.对于轨旁电源变换模块,具体的,轨旁电源变换模块包括:电源单元,用于将轨旁的交流电转换为第二直流电,不失一般性的,轨旁的交流电为220v;其中,电源单元包括电源转换电路以及整流电路,轨旁的交流电在经过电源转换电路转换后,输出为第三直流电。电源转换电路包括隔离电源电路以及多个隔离dc-dc电源转换电路,在通过隔离电源电路后,轨旁的交流电可被转换为24v的直流电输出,通过各种隔离dc-dc电源转换电路,可将24v的直流电转换成其他规格电压的第三直流电,例如,隔离dc-dc电源转换电路有三个,三个隔离dc-dc电源转换电路分别将24v的直流电转换为3.3v、5v、15v的第三直流电,从而为整个控制装置供所需的弱电。轨旁的交流电在经过整流电路整流后,还可以输出第二直流电。
37.强电转换单元,用于将第二直流电转换为第一直流电;其中,强电转换单元包括软启动电路以及pfc电压转换电路;第二直流电在依次经过软启动电路(软启动电路用于防止第二直流电冲击后续的电路)以及pfc电压转换电路(用于将第二直流电进行升压)后,输出第一直流电。
38.对于逻辑控制模块,具体的,逻辑控制模块包括第一安全cpu以及第二安全cpu(第一安全cpu以及第二安全cpu之间通过隔离芯片进行通信),其中,第一安全cpu用于发出第一控制信号、第三控制信号以及第五控制信号;第二安全cpu,用于发出第二控制信号、第四控制信号以及第六控制信号。第一安全cpu与第二安全cpu的配置相同,第一安全cpu包括电源转换、amr(advanced risc machines,高级精简指令集处理器)以及fpga(field programmable gate array,现场可编程逻辑门阵列),amr与fpga之间形成“amr fpga”的设计架构(即fpga和arm集成在一个soc上),即soc(system on chip,系统级芯片)作为第一安
全cpu。
39.对于整个的逻辑控制模块,采用标准的“二取二”结构,每个安全cpu实时获取综合数据监测与控制中心的控制命令,通过对控制命令的安全判断,并结合采集到的母线电压的信号以及母线电流的信号、输出电流(经过逆变电路输出的电流)信号以及定位或反位电流信号,第一安全cpu输出7路安全信号(4路pwm-io信号、1路pwm-io信号和2路io信号)和第二安全cpu2输出9路安全信号(6路pwm-io信号、1路pwm-io信号和2路io信号),通过对应的安全信号,可控制安全电源转换电路、第一级控制模块、第二级控制模块和采集模块的输入信号。
40.对于采集模块,具体的,采集模块包括:位置采集单元,用于根据第三控制信号采集转辙机的定位电流信号或根据第四控制信号采集转辙机的反位电流信号,其中,位置采集单元包括变压器以及定、反位检测电路(即定检测电路和反位检测电路);变压器t将220v的轨旁的交流电转换为低压(40~50v)交流电,将强电(轨旁的交流电)与采集模块隔离,低压交流电输入到定、反位检测电路(低压交流为定、反位检测电路提供交流电),通过定位检测电路可以采集转辙机的定位电流信号,通过反位检测电路可采集转辙机的反位电流信号。
41.本实施例中,变压器t包含一个第一初级线圈以及两个次级线圈(即第一次级线圈和第二次级线圈),变压器t的第一初级线圈接轨旁的交流电。
42.下面对定、反位检测电路具体工作原理进行说明(参考图4):定位检测电路包括电阻r1、电阻r3以及两个第一固态开关,电阻r1的一端接在其中一个第一固态开关的阳极,电阻r1的另一端接在第一次级线圈的一端,其中一个第一固态开关的阴极接电阻r3的一端;第一次级线圈的另一端接另一个第一固态开关的阳极,另一个第一固态开关的阴极接电阻r3的另一端;电阻r3的两端均接在转辙机上。
43.反位检测电路包括电阻r2、电阻r4以及两个第二固态开关,电阻r2的一端接在其中一个第二固态开关的阳极,电阻r2的另一端接在第二次级线圈的一端,其中一个第二固态开关的阴极接电阻r4的一端;第二次级线圈的另一端接另一个第二固态开关的阳极,另一个第二固态开关的阴极接电阻r4的另一端;电阻r4的两端均接在转辙机上。
44.当整个控制装置输出后,可通过第一安全cpu输出第三控制信号,第三控制信号包含2路io信号,2路io信号通过第三光耦电路(有两个)分别输送至其中一个第一固态开关的控制级以及另一个第一固态开关的控制级;第二安全cpu输出第四控制信号,第四控制信号也为2路io信号,这2路io信号通过第四光耦电路(有两个)分别输送至另一个第一固态开关的控制级以及其中一个第一固态开关的控制级。所有固态开关的导通或关断均可被控制,当转辙机到位后,此定位或反位检测电路构成回路。
45.采集输入单元,用于将定位电流信号或反位电流信号传输给逻辑控制模块,且在本实施例中,可通过采样电阻r1采集定位电流信号,通过r2,采集反位电流信号,具体的,所述采集输入单元包括第一ad采集电路、第二ad采集电路、第一隔离运放电路以及第二隔离运放电路,所有的隔离运放电路都是为了将对应的信号进行隔离放大,所有的ad采集电路都是为了将经过对应隔离运放电路隔离放大后的信号进行采集并传输给对应的安全cpu,其中,第一ad采集电路与第一隔离运放电路连接,其中,第一隔离运放电路有五个(为了
区别,五个第一隔离运放电路可分别命名为第一隔离运放电路a1、第一隔离运放电路a2、第一隔离运放电路a3、第一隔离运放电路a4以及第一隔离运放电路a5),五个第一隔离运放电路均与第一ad采集电路连接,第一ad采集电路与第一安全cpu连接;第二隔离运放电路也有五个(为了区别,五个第二隔离运放电路可分别命名为第二隔离运放电路b1、第二隔离运放电路b2、第二隔离运放电路b3、第二隔离运放电路b4以及第二隔离运放电路b5),五个第二隔离运放电路均与第二ad采集电路连接,第二ad采集电路与第二安全cpu连接。
46.电阻r1的两端连接在第一隔离运放电路a1上,电阻r1的两端还连接在第二隔离运放电路上b1;电阻r2的两端连接在第一隔离运放电路a2上,电阻r2的两端还连接在第二隔离运放电路b2上。
47.通过软件设计(两个安全cpu二取二逻辑处理),判断整个控制装置输出是否正常、转辙机的驱动是否到位等,如图4所示,两个安全cpu所对应ad采集和隔离运放电路之间采用硬件异构,保证转辙机位置信息安全采集。相对传统轨旁定位或反位采集电路,此位置整个采集模块的硬件电路结构简单、成本低。
48.在本实施例中,采集输入单元用于采集母线电压的信号、母线电流的信号以及转辙机的工作电压信息,并将母线电压的信号、母线电流的信号以及转辙机的工作电压信号传输给逻辑控制模块,具体的:母线电压的信号在经过第一隔离运放电路a3隔离放大后经第一ad采集电路传输给第一安全cpu,母线电流的信号在经过第一隔离运放电路a4隔离放大后经第一ad采集电路传输给第一安全cpu,转辙机的工作电压信号在经过第一隔离运放电路a5后通过第一ad采集电路传输给第一安全cpu;母线电压的信号在经过第二隔离运放电路b3隔离放大后经第二ad采集电路传输给第二安全cpu,母线电流的信号在经过第二隔离运放电路b4隔离放大后经第二ad采集电路传输给第二安全cpu,转辙机的工作电压信号在经过第二隔离运放电路b5后通过第二ad采集电路传输给第二安全cpu。
49.在本实施例中,逻辑控制模块还包括安全电源转换电路,安全电源转换电路用于根据第五控制信号(第五控制信号为1路pwm-io信号)以及第六控制信号(第六控制信号为1路pwm-io信号),为第一级控制模块(具体是为第一光耦电路)提供驱动电压。
50.在本实施例中,强电转换单元包括软启动电路以及pfc电压转换电路,其中,如图3所示的,pfc电压转换电路包括电感l1、电阻r11、二极管d1、mos管q11、电容c1和电容c2,电感l1的一端与软启动电路的第一输出端连接,电阻r11的一端与软启动电路的第二输出端连接,二极管d1的阳极与电感l1的另一端连接,二极管d1的阴极与电容c1的一端连接,电阻r11的另一端连接在电容c1的另一端,电容c2的一端连接电容c1的一端,电容c2的另一端连接在电容c1的另一端,mos管q11的源极连接在电阻r11的另一端,mos管q11的漏极连接在二极管d1的阳极。
51.采用硬件搭建的pfc电压转换电路,可通过检测输入端电流,控制输出开关管驱动信号。
52.具体的,pfc电压转换电路还包括pfc控制器,pfc控制器的电流检测端子连接在电阻r11的一端,用于检测第二直流电的电流;pfc控制器的电压检测端子连接在二极管d1的阴极,用于检测第二直流电的电压;pfc控制器的输出端与mos管q11的栅极连接(pfc控制器的输出端可输出mos管q11的驱动信号)。以此保证输入端电流与输入端电压同相位,从而提
升了整个pfc电压转换电路的功率因数,并输出稳定的第一直流电,此过程为纯硬件控制,可通过改变硬件元器件参数,实现不同的直流电输出。
53.在本实施例中,第一级控制模块包括第一光耦电路、第一级驱动电路以及高频逆变电路,其中,第一控制信号(第一控制信号为4路pwm-io信号)在依次通过第一光耦电路和第一级驱动电路后输出第一驱动信号(第一驱动信号有4路,如图3所示的驱动信号1-4)至高频逆变电路;高频逆变电路根据第一驱动信号,将第一直流电转换为脉冲信号。
54.其中,对于高频逆变电路,如图3所示的,高频逆变电路包括mos管q1、mos管q2、mos管q3以及mos管q4,其中,mos管q1的漏极连接在电容c2的一端,mos管q3的漏极连接在mos管q1的源极,mos管q3的源极连接在电容c2的另一端;mos管q2的漏极连接在mos管q1的漏极,mos管q2的源级与mos管q4的漏极连接,mos管q4的源级连接在mos管q3的源极;4路第一控制信号分别传输到mos管q1的栅极、mos管q2的栅极、mos管q3的栅极以及mos管q4的栅极。
55.高频逆变电路还包括电容c11,电容c11的一端连接在mos管q1的源极,电容c11的另一端与高频变压器连接。
56.在本实施例中,隔离升压模块包括高频变压器以及高频整流电路,高频变压器与高频整流电路连接,其中,脉冲信号在通过高频变压器进行电压变换后,经高频整流电路整流后输出母线电压,其中,高频变压器包含第二初级线圈以及第三次级线圈,电容c11的另一端连接在第二初级线圈的一端,第二初级线圈的另一端连接在mos管q4的源极;高频整流电路包括二极管d2、二极管d3、二极管d4以及二极管d5,二极管d2与二极管d3之间正向串联,二极管d2的阴极连接在第三次级线圈的一端,二极管d3的阳极连接在第三次级线圈的另一端;二极管d4以及二极管d5之间正向串联,二极管d4的阴极与二极管d2的阴极连接,二极管d5的阳极与二极管d3的阳极连接。
57.在本实施例中,第二级控制模块包括第二光耦电路、第二级驱动电路以及逆变电路,其中,第二控制信号(第二控制信号为6路pwm-io信号)在通过第二光耦电路和第二级驱动电路后输出第二驱动信号至逆变电路;逆变电路根据第二驱动信号(第二驱动信号有6路,如图3所示的驱动信号1-6),将母线电压转换为转辙机的工作电压,其中,逆变电路包括电感l2、电容c3、电容c4、mos管q5、mos管q6、mos管q7、mos管q8、mos管q9以及mos管q10,其中,电感l2的一端连接在二极管d2的阳极,电容c3的一端连接在电感l2的另一端,电容c3的另一端连接在二极管d5的阴极,电容c4的一端连接在电容c3的一端,电容c4的另一端连接在电容c3的另一端;mos管q5的漏级连接在电容c4的一端,mos管q8的漏级连接在mos管q5的源级,mos管q8的源级连接在电容c4的另一端;mos管q6的漏级连接在mos管q5的漏级,mos管q9的漏级连接在mos管q6的源级,mos管q9的源级连接在mos管q8的源级;mos管q7的漏级连接在mos管q6的漏级,mos管q10的漏级连接在mos管q7的源级,mos管q10的源级连接在mos管q9的源级;6路第二控制信号分别连接在mos管q5的栅极、mos管q6的栅极、mos管q7的栅极、mos管q8的栅极、mos管q9的栅极以及mos管q10的栅极,另外,从mos管q5的源级、mos管q6的源级以及mos管q7的源级各引出一输出端作为整个控制装置的输出(即可输出转辙机的工
作电压)。
58.本实施例中,整个逻辑控制模块控制的过程如下:控制第一级控制模块两个安全cpu通过硬件异构的ad采集电路实时检测输入第二级控制模块输入的母线电压和电流,以及整个控制装置输出电流,通过二取二逻辑判断,若判断一致(即安全cpu1采集的母线电压的信号和电流的信号、整个控制装置输出电流的信号以及定、反位电流的信号,在与安全cpu2采集的母线电压的信号和电流的信号、整个控制装置输出电流的信号以及定、反位电流的信号,一一对应一致,则判断为一致),则安全cpu1(第一安全cpu)输出4路pwm-io信号(第一控制信号),通过第一光耦电路和第一级驱动电路输出第一驱动信号,控制高频逆变电路将第一直流电转换为高频的脉冲信号输出;若不一致,则第一安全cpu停止输出4路pwm-io控制信号,整个的第一级控制模块无输出,同时安全cpu1可通过通信网络上传和保存故障信息至综合数据监测与控制中心。
59.采用安全cpu1输出1路pwm-io信号(第五控制信号),且与安全cpu2(第二安全cpu)输出1路pwm-io信号(第六控制信号)为互斥的信号时,经过安全电源转换电路输出控制电压,为第一级控制模块供电,若异常,则安全电源转换电路无输出电压,则第一级控制模块无输出。
60.第一级控制模块具备独立闭环控制,可为第二级控制模块提供稳定的电压输入。
61.控制第二级控制模块两个安全cpu通过硬件异构的ad采集电路实时检测输入第二级控制模块输入的母线电压和电流,以及整个控制装置驱动输出电流,通过二取二逻辑判断,若判断一致,则安全cpu2输出6路pwm-io信号(第二控制信号),通过第一光耦电路和第二级驱动电路输出驱动信号,控制逆变电路将母线电压转换为转辙机所需的工作电压;若不一致,则安全cpu2停止输出6路pwm-io控制信号,第二级控制模块无输出,并上传和保存故障信息。
62.两个安全cpu通过隔离芯片进行内部数据实时交互,可判断对机输出pwm-io信号是否正确,即安全cpu1可实时检测安全cpu2输出的6路pwm-io信号是否正确,同时安全cpu2可实时检测安全cpu1输出的4路pwm-io控制信号是否正确,构成相互校验机制,当任一安全cpu发现异常时,可立即停止输出相应的pwm-io信号,可保证转辙机的安全驱动输出。
63.在不改变硬件电路的基础上,可根据轨旁转辙机类型,通过修改安全cpu2控制程序输出不同的pwm-io控制信号,可实现多类型转辙机的安全驱动,具有良好的可拓展性和通用性。当且仅当第一级控制模块和隔离升压模块都正常输出时,第二级控制模块才能正常工作,并输出转辙机所需的工作电压,输出转辙机所需的工作电压可在经过tvs(transient voltage suppressor,瞬态二极管英文缩写),通过tvs,可有效地保护电子线路(即整个控制装置)中的精密元器件,免受各种浪涌脉冲的损坏。
64.由于高频变压器具有原副边隔离功能,因此即使原边第一级控制模块的器件发生器件故障时,副边第二级控制模块也不会误输出,实现两级控制模块硬件安全隔离,由于母线电压和电流被采集,因此,若发现第二级控制模块的器件异常,采用停止安全电源转换电路输出供电,停止两个cpu的两级驱动信号(第一控制信号和第二控制信号)输出,由此保证转辙机的安全驱动输出。
65.本实施例中,通过双安全cpu产生的安全信号来控制两级驱动(第一级驱动电路以
及第二级驱动电路)输出,可保证当任一安全cpu异常时,整个控制装置无输出;安全cpu1以及安全cpu2均可通过通信网络上传和保存故障信息至综合数据监测与控制中心。
66.另一方面,本发明还提供一种用于转辙机的控制方法,控制方法包括:通过轨旁电源变换模块将轨旁的交流电转换为第一直流电;通过逻辑控制模块发出第一控制信号以及第二控制信号;根据第一控制信号,通过第一级控制模块将第一直流电转换为脉冲信号;根据脉冲信号,通过隔离升压模块输出母线电压;根据第二控制信号,通过第二级控制模块将母线电压转换为转辙机的工作电压。
67.其中,第一级控制模块包括第一光耦电路、第一级驱动电路以及高频逆变电路,第一控制信号在通过第一光耦电路和第一级驱动电路后输出第一驱动信号至高频逆变电路;高频逆变电路根据第一驱动信号,将第一直流电转换为脉冲信号。
68.第二级控制模块包括第二光耦电路、第二级驱动电路以及逆变电路,第二控制信号在通过第二光耦电路和第二级驱动电路后输出第二驱动信号至逆变电路;逆变电路根据第二驱动信号,将母线电压转换为转辙机的工作电压。
69.本发明的一种用于转辙机的控制方法的各步骤实现的功能以及实现方式与本发明的一种用于转辙机的控制装置中各部件的功能以及实现方式对应一致,因此,此处不再赘述。
70.本发明还提供一种计算机可读存储介质,所述计算机可读存储介质存储有程序,所述程序可被处理器执行,以实现上述的一种用于转辙机的控制方法。
71.由于轨旁的转辙机控制装置为轨旁安全执行单元的重要组成部分,因此,本发明采用分布式轨旁安全执行单元产品,即将联锁的逻辑控制系统(综合数据监测与控制中心)位于室内,转辙机控制系统(本发明的整个控制装置)置于轨旁,通过光纤通信等冗余通信,实现分布式远程控制,通过设备的就近控制和闭环控制,可有效提高地面控制系统的可靠性和安全性,且整个强电(图3)与弱电之间不采用任何继电器节点)。
72.以上所述仅是本发明的较佳实施例而已,并非对本发明做任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案的范围内,当可利用上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。