技术特征:
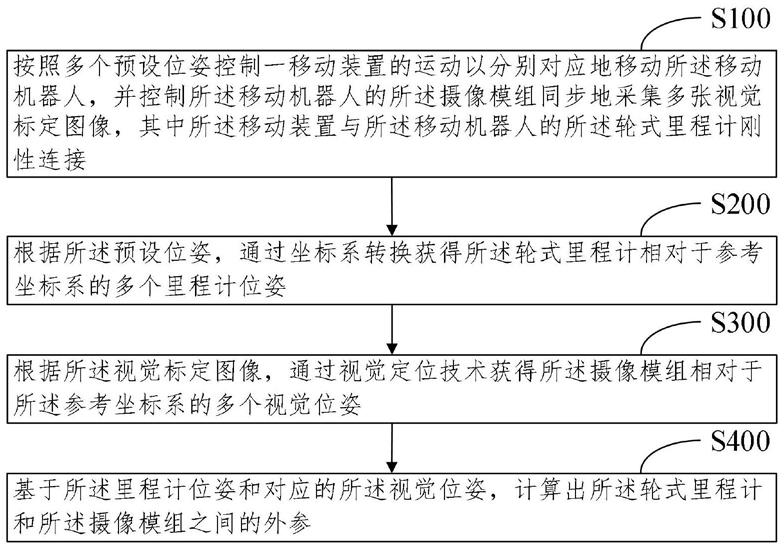
1.一外参标定方法,用于标定搭载在移动机器人上的轮式里程计和摄像模组之间的外参,其特征在于,其中所述外参标定方法包括步骤:按照多个预设位姿控制一移动装置的运动以分别对应地移动该移动机器人,并控制该移动机器人的该摄像模组同步地采集多张视觉标定图像,其中该移动装置与该移动机器人的该轮式里程计刚性连接;根据该多个预设位姿,通过坐标转换获得该轮式里程计相对于参考坐标系的多个里程计位姿;根据该多张视觉标定图像,通过视觉定位技术获得该摄像模组相对于该参考坐标系的多个视觉位姿;以及基于该里程计位姿和对应的所述视觉位姿,计算出该轮式里程计和该摄像模组之间的外参。2.如权利要求1所述的外参标定方法,其中,该移动装置被控制以在一运动平面内平移和旋转该移动机器人。3.如权利要求2所述的外参标定方法,其中,该移动装置为一机械臂系统,其中该机械臂系统包括一机械臂、一底座和一连接台,其中该机械臂的一端被安装于该底座,并且该机械臂的另一端连接于该连接台,其中该连接台适于安装该移动机器人以使该连接台与该轮式里程计刚性地连接。4.如权利要求3所述的外参标定方法,其中,该移动机器人的该轮式里程计的坐标系与该机械臂系统的该连接台的坐标系重合,使得该预设位姿为该轮式里程计相对于该底座的位姿。5.如权利要求2至4中任一所述的外参标定方法,其中,该摄像模组被控制以同步地拍摄具有视觉特征点的图案,用于获得具有角点特征的该视觉标定图像。6.如权利要求5所述的外参标定方法,其中,该具有视觉特征点的图案为标签图案或棋盘格图案。7.如权利要求6所述的外参标定方法,进一步包括步骤:提供一标定箱,其中该标定箱内设置有该具有视觉特征点的图案,以在该标定箱内移动该移动机器人时,该摄像模组能够拍摄该具有视觉特征点的图案以获得具有角点特征的该视觉标定图像。8.如权利要求7所述的外参标定方法,其中,该标定箱具有立方体形状,并且该标定箱的顶面和底面均平行于该运动平面。9.如权利要求8所述的外参标定方法,其中,该具有视觉特征点的图案被贴附于该标定箱的三个侧面内壁。10.一外参标定系统,用于标定搭载在移动机器人上的轮式里程计和摄像模组之间的外参,其特征在于,其中所述外参标定系统包括相互可通信地连接的:一控制模块,用于按照多个预设位姿控制一移动装置的运动以分别对应地移动该移动机器人,并控制该移动机器人的该摄像模组同步地采集多张视觉标定图像,其中该移动装置与该移动机器人的该轮式里程计刚性连接;一坐标转换模块,用于根据该多个预设位姿,通过坐标转换获得该轮式里程计相对于参考坐标系的多个里程计位姿;
一视觉定位模块,用于根据该多张视觉标定图像,通过视觉定位技术获得该摄像模组相对于该参考坐标系的多个视觉位姿;以及一外参计算模块,用于基于该里程计位姿和对应的所述视觉位姿,计算出该轮式里程计和该摄像模组之间的外参。11.一电子设备,其特征在于,包括:至少一处理器,用于执行指令;和与所述至少一处理器可通信地连接的存储器,其中,所述存储器具有至少一指令,其中,所述指令被所述至少一处理器执行,以使得所述至少一处理器执行外参标定方法中的部分或全部步骤,其中所述外参标定方法用于标定搭载在移动机器人上的轮式里程计和摄像模组之间的外参,并且所述外参标定方法包括步骤:按照多个预设位姿控制一移动装置的运动以分别对应地移动该移动机器人,并控制该移动机器人的该摄像模组同步地采集多张视觉标定图像,其中该移动装置与该移动机器人的该轮式里程计刚性连接;根据该多个预设位姿,通过坐标转换获得该轮式里程计相对于参考坐标系的多个里程计位姿;根据该多张视觉标定图像,通过视觉定位技术获得该摄像模组相对于该参考坐标系的多个视觉位姿;以及基于该里程计位姿和对应的所述视觉位姿,计算出该轮式里程计和该摄像模组之间的外参。12.一电子设备,用于标定搭载在移动机器人上的轮式里程计和摄像模组之间的外参,其特征在于,包括:一电子设备本体,其中所述电子设备本体包括一移动装置,其中所述移动装置适于与该移动机器人的该轮式里程计刚性连接;和至少一外参标定系统,其中所述外参标定系统被配置于所述电子设备本体,并且所述外参标定系统包括相互可通信地连接的:一控制模块,用于按照多个预设位姿控制所述移动装置的运动以分别对应地移动该移动机器人,并控制该移动机器人的该摄像模组同步地采集多张视觉标定图像;一坐标转换模块,用于根据该多个预设位姿,通过坐标转换获得该轮式里程计相对于参考坐标系的多个里程计位姿;一视觉定位模块,用于根据该多张视觉标定图像,通过视觉定位技术获得该摄像模组相对于该参考坐标系的多个视觉位姿;以及一外参计算模块,用于基于该里程计位姿和对应的所述视觉位姿,计算出该轮式里程计和该摄像模组之间的外参。13.如权利要求12所述的电子设备,其中,所述移动装置为一机械臂系统,其中所述机械臂系统包括一机械臂、一底座和一连接台,其中所述机械臂的一端被安装于所述底座,并且所述机械臂的另一端连接于所述连接台,其中所述连接台适于安装该移动机器人以使所述连接台与该轮式里程计刚性地连接。14.如权利要求12或13所述的电子设备,其中,所述电子设备本体进一步包括一标定箱,其中所述标定箱内设置有具有视觉特征点的图案,以在所述标定箱内移动该移动机器
人时,该摄像模组能够拍摄所述具有视觉特征点的图案以获得具有角点特征的该视觉标定图像。
技术总结
一种外参标定方法及其系统和电子设备,用于标定搭载在移动机器人上的轮式里程计和摄像模组之间的外参。该外参标定方法包括步骤:按照多个预设位姿控制一移动装置的运动以分别对应地移动该移动机器人,并控制该移动机器人的该摄像模组同步地采集多张视觉标定图像,其中该移动装置与该移动机器人的该轮式里程计刚性连接;根据该多个预设位姿,通过坐标转换获得该轮式里程计相对于参考坐标系的多个里程计位姿;根据该多张视觉标定图像,通过视觉定位技术获得该摄像模组相对于该参考坐标系的多个视觉位姿;以及基于该里程计位姿和对应的该视觉位姿,计算出该轮式里程计和该摄像模组之间的外参。模组之间的外参。
技术研发人员:郭云雷 王培建 李辉
受保护的技术使用者:浙江舜宇智能光学技术有限公司
技术研发日:2020.10.23
技术公布日:2022/5/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。