1.本实用新型涉及液态油运输技术领域,尤其涉及带有定位功能的智能装油机械臂。
背景技术:
2.汽油、柴油等液态油是运输业重要的消耗品,罐车从油气分离站灌装液态油后运输到各地的加油站处供车辆使用。目前的分离站给罐车加油有两种方式,一种是人工爬到罐车上通过油枪进行加油,操作麻烦,工人频繁爬上爬下负担较重;另一种是自动加油,分离站设置有可水平单向移动的加油口,罐车需要先对正位置,使加油口移动到罐车的进油漏斗上侧,然后打开加油口进行加油,这种加油方式效率较高,但是罐车对正的过程不易把握,浪费加油时间,并且不同的罐车高度不同,加油口距离罐车的进油漏斗的高度也不同,加油口的高度无法调节,对于距离加油口较远的罐车进行加油时准度不易控制,容易使油洒出,造成浪费。
技术实现要素:
3.本实用新型的目的在于避免现有技术的不足之处,提供带有定位功能的智能装油机械臂,从而有效解决现有技术中存在的不足之处。为实现上述目的,本实用新型采取的技术方案为:带有定位功能的智能装油机械臂,包括支撑架,支撑架上设置有进油管、第一油管、第二油管和加油管,所述第一油管通过第一弯头和第二弯头与进油管连接,第一弯头可转动的设置在进油管上,第二弯头可转动的设置在第一弯头上,所述支撑架上设置有可驱动第一弯头绕进油管转动的第一驱动装置,所述第一弯头上设置有可驱动第二弯头绕第一弯头转动的第二驱动装置;所述第二油管通过第三弯头和第四弯头与第一油管连接,第三弯头固定设置在第一油管上,第四弯头可转动的设置在第三弯头上,所述第三弯头上设置有可驱动第四弯头绕第三弯头转动的第三驱动装置;所述加油管通过第五弯头和第六弯头与第二油管连接,第五弯头固定设置在第二油管上,第六弯头可转动的设置在第五弯头上。
4.进一步,所述第一驱动装置包括同轴固定在第一弯头上的转杆和驱动转杆转动的电机,所述支撑架上配合转杆设置有支撑轴承。
5.进一步,所述第一弯头上设置有第一支架,所述第二驱动装置包括铰接设置在第一支架上的气缸,所述第一油管上设置有与气缸的输出端铰接的第一连杆。
6.进一步,所述第二弯头上设置有第二支架,所述第三驱动装置包括铰接设置在第二支架上的气缸,所述第二油管上设置有与气缸的输出端铰接的第二连杆。
7.进一步,所述支撑架于进油管的对侧开设有截面为t形的滑槽,滑槽中可上下移动的设置有固定背板。
8.本实用新型的上述技术方案具有以下有益效果:本实用新型通过第一油管和第二油管在进油管上水平和竖直转动,实现对加油管的水平位置和竖直高度的调节,从而提高加油口与罐车进油口的对准度,避免油洒出,减少自动加油的浪费,也减少罐车对正位置的
时间,提高加油效率。
附图说明
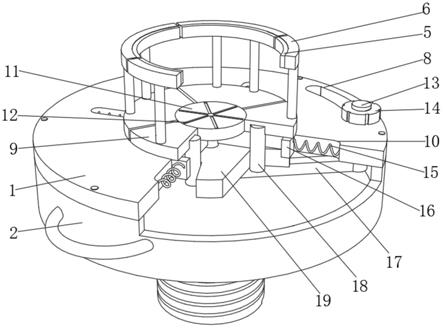
9.图1为本实用新型实施例的主视图;
10.图2为本实用新型实施例的俯视图。
具体实施方式
11.下面结合附图和实施例对本实用新型的实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不能用来限制本实用新型的范围。
12.在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
13.如图1-2所示,本实施例所述的带有定位功能的智能装油机械臂,包括支撑架1,支撑架1上设置有进油管2、第一油管3、第二油管4 和加油管5,第一油管3通过第一弯头6和第二弯头7与进油管2连接,第一弯头6可转动的设置在进油管2上,第二弯头7可转动的设置在第一弯头6上,支撑架1上设置有可驱动第一弯头6绕进油管2转动的第一驱动装置10,第一弯头6上设置有可驱动第二弯头7绕第一弯头6转动的第二驱动装置11;第二油管4通过第三弯头8和第四弯头 9与第一油管3连接,第三弯头8固定设置在第一油管3上,第四弯头 9可转动的设置在第三弯头8上,第三弯头8上设置有可驱动第四弯头 9绕第三弯头8转动的第三驱动装置12;加油管5通过第五弯头13和第六弯头14与第二油管4连接,第五弯头13固定设置在第二油管4 上,第六弯头14可转动的设置在第五弯头13上;
14.进油管2连接分离站的出油口,第一驱动装置10驱动第一弯头6 绕进油管2水平转动,使第一油管3、第二油管4和加油管5随第一弯头6在水平面转动,水平调整角度,在竖向与罐车的加油漏斗对正角度,然后第二驱动装置11驱动第二弯头7绕第一弯头6转动,同时第三驱动装置12驱动第四弯头9绕第三弯头8转动,使第一油管3和第二油管4向罐车的加油漏斗方向伸展开,使加油管5移动到加油漏斗上方,在第一油管3和第二油管4伸展过程中,第六弯头14可在第五弯头13上转动,加油管5通过自重保持竖直,加油管5移动到加油漏斗上方后即可给罐车进行加油;
15.优选的,第一驱动装置10包括同轴固定在第一弯头6上的转杆15 和驱动转杆15转动的电机,支撑架1上配合转杆15设置有支撑轴承 16;电机可通过减速机驱动转杆15转动,带动第一弯头6慢速转动角度;
16.优选的,第一弯头6上设置有第一支架17,第二驱动装置11包括铰接设置在第一支架17上的气缸,第一油管3上设置有与气缸的输出端铰接的第一连杆18,气缸伸缩带动第一
连杆18靠近或远离第一支架 17,从而实现第二弯头7绕第一弯头6转动,第一油管3进行摆动;
17.优选的,第二弯头7上设置有第二支架19,第三驱动装置12包括铰接设置在第二支架19上的气缸,第二油管4上设置有与气缸的输出端铰接的第二连杆20,气缸伸缩带动第二连杆20靠近或远离第二支架 19,从而实现第四弯头9绕第三弯头8转动,第二油管4进行摆动;
18.优选的,支撑架1于进油管2的对侧开设有截面为t形的滑槽21,滑槽21中可上下移动的设置有固定背板22,支撑架1的底部可通过螺栓进行固定,固定背板22可通过螺栓固定在竖直面上,避免第一油管 3、第二油管4和加油管5的重力对进油管2处产生扭矩。
19.本实用新型的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本实用新型限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本实用新型的原理和实际应用,并且使本领域的普通技术人员能够理解本实用新型从而设计适于特定用途的带有各种修改的各种实施例。
技术特征:
1.带有定位功能的智能装油机械臂,其特征在于:包括支撑架,支撑架上设置有进油管、第一油管、第二油管和加油管,所述第一油管通过第一弯头和第二弯头与进油管连接,第一弯头可转动的设置在进油管上,第二弯头可转动的设置在第一弯头上,所述支撑架上设置有可驱动第一弯头绕进油管转动的第一驱动装置,所述第一弯头上设置有可驱动第二弯头绕第一弯头转动的第二驱动装置;所述第二油管通过第三弯头和第四弯头与第一油管连接,第三弯头固定设置在第一油管上,第四弯头可转动的设置在第三弯头上,所述第三弯头上设置有可驱动第四弯头绕第三弯头转动的第三驱动装置;所述加油管通过第五弯头和第六弯头与第二油管连接,第五弯头固定设置在第二油管上,第六弯头可转动的设置在第五弯头上。2.根据权利要求1所述的带有定位功能的智能装油机械臂,其特征在于:所述第一驱动装置包括同轴固定在第一弯头上的转杆和驱动转杆转动的电机,所述支撑架上配合转杆设置有支撑轴承。3.根据权利要求1所述的带有定位功能的智能装油机械臂,其特征在于:所述第一弯头上设置有第一支架,所述第二驱动装置包括铰接设置在第一支架上的气缸,所述第一油管上设置有与气缸的输出端铰接的第一连杆。4.根据权利要求1所述的带有定位功能的智能装油机械臂,其特征在于:所述第二弯头上设置有第二支架,所述第三驱动装置包括铰接设置在第二支架上的气缸,所述第二油管上设置有与气缸的输出端铰接的第二连杆。5.根据权利要求1所述的带有定位功能的智能装油机械臂,其特征在于:所述支撑架于进油管的对侧开设有截面为t形的滑槽,滑槽中可上下移动的设置有固定背板。
技术总结
本实用新型公开的带有定位功能的智能装油机械臂,包括支撑架,支撑架上设置有进油管、第一油管、第二油管和加油管,所述第一油管通过第一弯头和第二弯头与进油管连接;所述第二油管通过第三弯头和第四弯头与第一油管连接;所述加油管通过第五弯头和第六弯头与第二油管连接;本实用新型通过第一油管和第二油管在进油管上水平和竖直转动,实现对加油管的水平位置和竖直高度的调节,从而提高加油口与罐车进油口的对准度,避免油洒出,减少自动加油的浪费,也减少罐车对正位置的时间,提高加油效率。率。率。
技术研发人员:尹浩霖
受保护的技术使用者:尹浩霖
技术研发日:2021.11.23
技术公布日:2022/5/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。