技术特征:
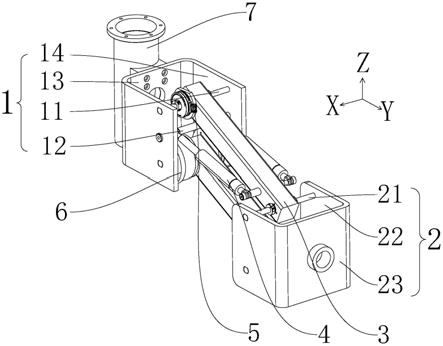
1.一种摆臂升降机构,其特征在于,包括固定座(1)、升降座(2)、连杆(3)和重力平衡器件(4),所述连杆(3)沿上下方向平行分布,所述连杆(3)分别与所述固定座(1)和所述升降座(2)铰接;所述重力平衡器件(4)分别设置于所述连杆(3)的两侧,所述重力平衡器件(4)的一端均与所述固定座(1)铰接,另一端与所述连杆(3)铰接。2.根据权利要求1所述的摆臂升降机构,其特征在于,所述重力平衡器件(4)为气弹簧,所述气弹簧相对设置于所述连杆(3)的两侧,所述气弹簧与位于最上方的所述连杆(3)铰接,沿上下方向,所述气弹簧与所述固定座(1)的铰接位置,低于最上方所述连杆(3)与所述固定座(1)的铰接位置,且高于最下方的所述连杆(3)与所述固定座(1)的铰接位置。3.根据权利要求1或2所述的摆臂升降机构,其特征在于,所述固定座(1)包括固定座本体、第一连接轴(11)和第二连接轴(12),所述固定座本体包括第一底板(13)和相对设置于所述第一底板(13)的第一侧板(14),所述第一侧板(14)均位于所述第一底板(13)朝向所述升降座(2)的一侧,所述连杆(3)通过所述第一连接轴(11)与两个所述第一侧板(14)连接,所述重力平衡器件(4)均通过第二连接轴(12)与所述第一侧板(14)连接。4.根据权利要求3所述的摆臂升降机构,其特征在于,所述第二连接轴(12)到最上方和最下方的所述第一连接轴(11)的距离相等。5.根据权利要求1所述的摆臂升降机构,其特征在于,所述升降座(2)包括升降座本体和第三连接轴(21),所述升降座本体包括第二底板(23)和相对设置于所述第二底板(23)的第二侧板(22),所述第二侧板(22)均位于所述第二底板(23)朝向所述固定座(1)的一侧,所述连杆(3)通过所述第三连接轴(21)与所述第二侧板(22)连接。6.根据权利要求1所述的摆臂升降机构,其特征在于,还包括编码器(5)和制动器(6),所述编码器(5)和所述制动器(6)均分别与所述固定座(1)和所述连杆(3)连接。7.根据权利要求6所述的摆臂升降机构,其特征在于,所述编码器(5)和制动器(6)分别设置于不同所述连杆(3)处。8.一种机械臂,其特征在于,包括权利要求1至7任意一项所述的摆臂升降机构。9.根据权利要求8所述的机械臂,其特征在于,还包括被动式升降立臂和前端关节组件,所述被动式升降立臂包括立臂本体(7),所述摆臂升降机构的固定座(1)与所述立臂本体(7)连接,所述摆臂升降机构的升降座(2)与所述前端关节组件连接。10.一种主从手术机器人,其特征在于,包括权利要求1至7任意一项所述的摆臂升降机构,或者,包括权利要求8或9所述的机械臂。
技术总结
本实用新型提供一种摆臂升降机构、机械臂及主从手术机器人。本实用新型所述摆臂升降机构,包括固定座、升降座、连杆和重力平衡器件,所述连杆沿上下方向平行分布,所述连杆分别与所述固定座和所述升降座铰接;所述重力平衡器件分别设置于所述连杆的两侧,所述重力平衡器件的一端均与所述固定座铰接,另一端与所述连杆铰接。本实用新型所述摆臂升降机构,能够在一定程度上平衡摆臂升降机构的重力,提高升降座升降的稳定性及灵活性;可以在一定程度上增强摆臂升降机构的整体受力稳定性,可以避免重力平衡器件对连杆的摆动范围造成干扰或者降低对固定座和升降座在上下方向的尺寸需求,可靠性和稳定性高。靠性和稳定性高。靠性和稳定性高。
技术研发人员:李鑫 王建国
受保护的技术使用者:哈尔滨思哲睿智能医疗设备有限公司
技术研发日:2021.11.09
技术公布日:2022/5/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。