技术特征:
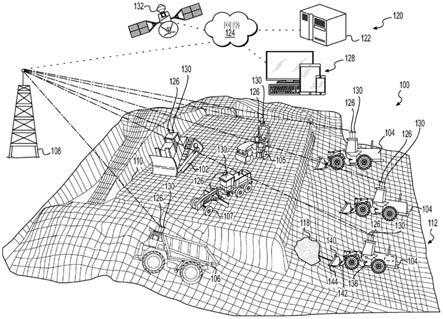
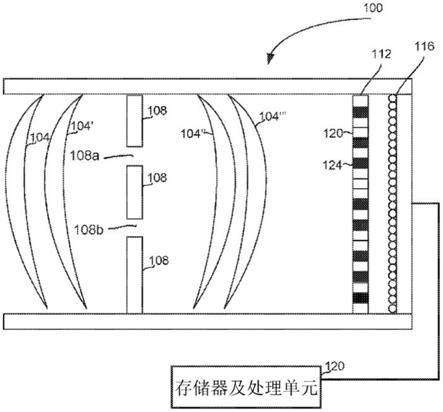
1.一种估计工作现场(112)处的生产率的方法(200、300、400),包括:使用控制器(122)接收(302)待由所述工作现场(112)处的拖运机(106)、摊铺机(106)和压实机(105)执行的工作现场计划;使用所述控制器(122)基于所述拖运机(106)、所述摊铺机(107)和所述压实机(105)的各自能力分配(304)所述拖运机(106)、所述摊铺机(107)和所述压实机(105)执行所述工作现场计划内的任务;使用所述控制器(122)从所述拖运机(106)、所述摊铺机(107)和所述压实机(105)接收(306)定义所述任务完成的指示的机器远程信息处理数据;以及使用所述控制器(122)基于所述机器远程信息处理数据来计算(308)提升数。2.根据权利要求1所述的方法(200、300、400),还包括使用所述控制器(122)并且在用户界面上呈现基于所述提升数的所述工作现场计划完成百分比的指示。3.根据权利要求1所述的方法(200),其中所述机器远程信息处理数据包括定义在执行所述任务期间所述拖运机(106)、所述摊铺机(107)和所述压实机(105)的位置的位置数据。4.根据权利要求3所述的方法(200、300、400),其中计算所述提升数包括:将所述工作现场(112)分成区段;基于所述位置数据跟踪所述拖运机(106)、所述摊铺机(107)和所述压实机(105)的移动;以及基于所述位置数据识别所述任务的完成。5.根据权利要求4所述的方法(200、300、400),其中所述提升数包括由在所述工作现场(112)的所述区段内沉积并且压实的材料(118)的深度限定的提升高度的测量。6.根据权利要求1所述的方法(200、300、400),其中计算所述提升数包括:确定是否已经从所述拖运机(106)、所述摊铺机(107)和所述压实机(105)接收到指示所述任务完成的所述机器远程信息处理数据;以及响应于确定已经接收到所述机器远程信息处理数据,对所述提升数进行计数。7.根据权利要求6所述的方法(200、300、400),还包括在随后确定所述机器远程信息处理数据已被接收的情况下对多个提升数进行计数,其中所述多个提升数定义所述工作现场计划的完成百分比。8.一种用于测量不同类型机器的生产率的系统(100),包括:控制器(122);可在工作现场(112)处操作以执行工作现场计划内的第一任务的第一类型的第一机器(102、104、105、106、107);可在所述工作现场(112)处操作以执行所述工作现场计划内的第二任务的第二类型的至少第二机器(102、104、105、106、107);以及通信网络(124),所述通信网络被配置成在所述控制器(122)与所述第一机器(102、104、105、106、107)和所述第二机器(102、104、105、106、107)之间传输信号;所述控制器(122)被配置成:从与所述第一机器(102、104、105、106、107)相关联的第一传感器(130)接收第一机器远程信息处理数据,所述第一机器远程信息处理数据定义所述第一机器(102、104、105、106、107)完成所述第一任务的指示;
从与所述第二机器(102、104、105、106、107)相关联的第二传感器(130)接收第二机器远程信息处理数据,所述第二机器远程信息处理数据定义所述第二机器(102、104、105、106、107)完成所述第二任务的指示;以及基于所述第一机器远程信息处理数据和所述第二机器远程信息处理数据计算提升数,所述提升数定义所述工作现场计划的完成百分比。9.根据权利要求8所述的系统(100),其中所述工作现场计划包括多个提升数,所述多个提升数的数目定义所述工作现场计划的完成百分比。10.根据权利要求9所述的系统(100),其中所述控制器(122)还被配置成在用户界面上呈现基于所述多个提升数的所述工作现场计划的完成百分比的指示。11.根据权利要求8所述的系统(100),其中所述第一机器(102、104、105、106、107)和所述第二机器(102、104、105、106、107)包括:执行所述工作现场计划内的所述第一任务的所述第一类型的第一机器(102、104、105、106、107);执行所述工作现场计划内的所述第二任务的所述第二类型的第二机器(102、104、105、106、107);以及执行所述工作现场计划内的第三任务的第三类型的第三机器(102、104、105、106、107),其中计算所述提升数包括:接收所述第一机器远程信息处理数据、所述第二机器远程信息处理数据和从与所述第三机器(102、104、105、106、107)相关联的第三传感器(130)接收的定义所述第三机器(102、104、105、106、107)完成第三任务的指示的第三机器远程信息处理数据;以及基于所述第一机器远程信息处理数据、所述第二机器远程信息处理数据以及所述第三机器远程信息处理数据计算所述提升数。12.根据权利要求11所述的系统(100),其中:所述第一机器(102、104、105、106、107)包括拖运机(106)以向所述工作现场(112)拖运材料(118)以及在所述工作现场内拖运材料,所述第一任务包括拖运实例;所述第二机器(102、104、105、106、107)包括在所述工作现场(112)内扩散所述材料(118)的摊铺机(107),所述第二任务包括扩散实例;以及所述第三机器(102、104、105、106、107)包括在所述工作现场(112)内压实所述材料(118)的压实机(105),所述第三任务包括压实实例。13.根据权利要求11所述的系统(100),其中所述第一机器(102、104、105、106、107),所述第二机器(102、104、105、106、107)和所述第三机器(102、104、105、106、107)包括远程信息处理通信装置(126),以将所述第一机器远程信息处理数据、所述第二机器远程信息处理数据以及所述第三机器远程信息处理数据传输到所述控制器(122)。14.根据权利要求12所述的系统(100),其中:所述第一机器(102、104、105、106、107)的所述第一传感器(130)包括第一位置传感器(130),以在执行所述第一任务期间跟踪所述第一机器(102、104、105、106、107)的位置;并且所述第二机器(102、104、105、106、107)的所述第二传感器(130)包括第二位置传感器
(130),以在执行所述第二任务期间跟踪至少第二机器(102、104、105、106、107)的位置,并且所述控制器(122)至少部分地基于从所述第一位置传感器(130)和所述第二位置传感器(130)获得的位置数据计算所述提升数。15.根据权利要求14所述的系统(100),其中使用所述控制器(122),计算所述提升数包括:将所述工作现场分成(406)区段;基于所述位置数据跟踪(408)所述拖运机(106)、所述摊铺机(107)和所述压实机(105)的移动;以及基于所述位置数据识别(410)所述第一任务和所述第二任务的完成。
技术总结
一种估计工作现场处的生产率的方法,包括:使用控制器接收待由所述工作现场处的拖运机、摊铺机和压实机执行的工作现场计划;使用所述控制器基于所述拖运机、所述摊铺机和所述压实机的各自能力分配所述拖运机、所述摊铺机和所述压实机执行所述工作现场计划内的任务;使用所述控制器从所述拖运机、所述摊铺机和所述压实机接收定义所述任务完成的指示的机器数据;以及使用所述控制器基于所述机器数据来计算提升数。计算提升数。计算提升数。
技术研发人员:C
受保护的技术使用者:卡特彼勒公司
技术研发日:2020.09.30
技术公布日:2022/5/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。