技术特征:
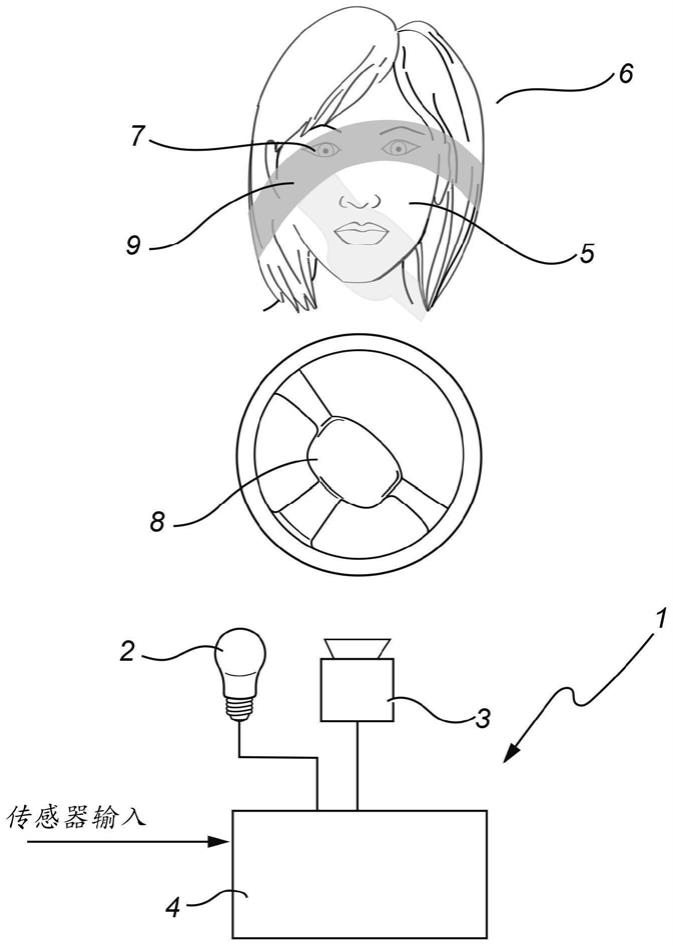
1.一种用于确定图像传感器与交通工具的驾驶员的目标区域之间的距离d
传感器
的方法,包括:以已知几何关系相对于所述图像传感器布置点光源,使得所述交通工具的方向盘至少偶尔在所述目标区域中投射阴影;基于包括所述阴影的所述目标区域的由所述图像传感器获取的图像以及所述点光源与所述方向盘之间的几何关系,确定所述点光源与所述目标区域之间的距离d
光源
;以及基于所述距离d
光源
以及在所述点光源与所述图像传感器之间的所述已知几何关系,确定所述距离d
传感器
,其中,所述距离d
光源
通过以下项确定:在所述图像中检测所述方向盘的特定部分的阴影的宽度(r),以及按照d
光源
=d
×
r/r计算距离d
光源
,其中,d是所述点光源与所述方向盘之间的已知距离,r是所述部分的已知宽度,以及r是所检测到的宽度,或者,所述距离d
光源
通过以下项确定:在所述图像中检测所述方向盘的一部分的特定轮廓的阴影的位置p,以及按照d
光源
=d
×
p/p计算所述距离d
光源
,其中,d是所述点光源与所述方向盘之间的已知距离,p是所述轮廓的已知位置,以及p是检测到的位置,其中,所述位置p和所述检测到的位置p都是相对于所述点光源的光轴确定的。2.根据权利要求1所述的方法,其中,所述部分是所述方向盘的轮辋或辐条。3.根据权利要求中的一项所述的方法,还包括:确定所述图像传感器与所述方向盘之间的距离,以及基于所述图像传感器与所述方向盘之间的所述距离以及所述点光源与所述图像传感器之间的所述已知关系,确定所述点光源与所述方向盘之间的距离d。4.根据权利要求3所述的方法,其中,所述图像传感器与所述方向盘之间的距离是基于在由所述图像传感器获取的图像中识别的几何参数的值和所述几何参数在已知距离处的预先识别值确定的。5.根据权利要求3所述的方法,其中,基于由所述图像传感器获取的图像中的一组标记的位置来确定所述图像传感器与所述方向盘之间的距离,所述标记被布置在所述结构上的预定位置处。6.根据前述权利要求中的一项所述的方法,其中,所述方法还包括根据由所述图像传感器获取的图像并基于所述图像传感器与所述结构之间的距离,确定所述方向盘的几何结构。7.根据前述权利要求中的一项所述的方法,其中,所述方法还包括检测所述方向盘的角位置。8.一种用于确定图像传感器与交通工具的驾驶员的目标区域之间的距离d
传感器
的装置,包括:点光源,所述点光源以已知几何关系相对于所述图像传感器进行布置,并且被布置成使得所述交通工具的方向盘至少偶尔在所述目标区域中投射阴影,处理电路,所述处理电路被配置为:基于包括所述阴影的所述目标区域的由所述图像传感器获取的图像以及所述光源与
所述方向盘之间的几何关系,确定所述点光源与所述目标区域之间的距离d
光源
,以及基于所述距离d
光源
以及在所述点光源与所述图像传感器之间的所述已知几何关系,确定所述距离d
传感器
,其中,所述距离d
光源
通过以下项确定:在所述图像中检测所述方向盘的特定部分的阴影的宽度(r),以及按照d
光源
=d
×
r/r计算所述距离d
光源
,其中d是所述点光源与所述方向盘之间的已知距离,r是所述部分的已知宽度,以及r是所检测到的宽度,或者,所述距离d
光源
通过以下项确定:在所述图像中检测所述方向盘的一部分的特定轮廓的阴影的位置p,以及按照d
光源
=d
×
p/p计算所述距离d
光源
,其中d是所述点光源与所述方向盘之间的已知距离,p是所述轮廓的已知位置,以及p是检测到的位置,其中,所述位置p和所述检测到的位置p都是相对于所述点光源的光轴确定的。9.根据权利要求8所述的装置,其中,所述系统还包括用于检测所述方向盘的角位置的角传感器。
技术总结
一种用于确定图像传感器与交通工具驾驶员的目标区域之间的距离D
技术研发人员:安德斯
受保护的技术使用者:斯玛特艾公司
技术研发日:2020.09.22
技术公布日:2022/5/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。