1.本公开涉及计算用于使用图像对表示对象物的运动的位移的实际尺寸值即实际尺寸位移量进行计测的校正参数的校正参数计算方法、位移量计算方法、校正参数计算装置及位移量计算装置。
背景技术:
2.以往,公开了一种摄像装置,使用由相机对对象物进行摄像而得到的图像数据、以及由激光距离计等距离计测装置计测的距对象物的距离测定值,以非接触方式测定对象物周围的状态(参照专利文献1)。例如在对象物是桥梁的情况下,状态是桥梁的挠曲量等。
3.在先技术文献
4.专利文献
5.专利文献1:日本特许第5281610号公报
技术实现要素:
6.发明所要解决的课题
7.但是,在专利文献1的摄像装置中,为了高精度地测定对象物的状态,需要以相机的光轴与距离计测装置的光轴平行的方式设置相机和距离计测装置。因此,在专利文献1中公开了使用安装器材,该安装器材用于以相机的光轴与距离计测装置的光轴平行的方式安装相机和距离计测装置。像这样,在专利文献1的摄像装置中,为了高精度地计测物体的状态需要准备安装器材,难以高精度而且容易地计测位移的实际尺寸值。
8.于是,本公开涉及在使用图像计测位移时能够高精度而且容易地将位移量换算为实际尺寸值的校正参数计算方法等。
9.用于解决课题的手段
10.本公开的一个方式所涉及的校正参数计算方法计算用于使用图像对实际尺寸位移量进行计测的校正参数,该实际尺寸位移量是表示对象物的运动的位移的实际尺寸值,所述校正参数计算方法包括:第1取得步骤,从第1摄像装置取得通过对所述对象物进行摄像而得到的第1图像数据;第2取得步骤,从所述第2摄像装置,取得从被配置在与所述第1摄像装置不同的位置的第2摄像装置到所述对象物的第2距离数据、以及通过对所述对象物进行摄像而得到的第2图像数据;建立对应步骤,将所述第1图像数据中的所述对象物的位置与所述第2图像数据中的所述对象物的位置建立对应;估计步骤,基于建立对应结果以及所述第2距离数据,估计所述第1摄像装置相对于所述第2摄像装置的位置;距离计算步骤,基于所述第1摄像装置的位置以及所述第2距离数据,计算从所述第1摄像装置到所述对象物的第1距离数据;以及参数计算步骤,使用所述第1距离数据,计算用于将所述对象物的计测点的像素位移量换算为实际尺寸位移量的所述校正参数,所述对象物的计测点的像素位移量基于由所述第1摄像装置在相互不同的定时摄像的2个以上的第3图像数据。
11.本公开的一个方式所涉及的校正参数计算方法计算用于使用图像对实际尺寸位移量进行计测的校正参数,该实际尺寸位移量是表示对象物的运动的位移的实际尺寸值,所述校正参数计算方法包括:第1取得步骤,从第1摄像装置取得通过对所述对象物进行摄像而得到的第1图像数据;第2取得步骤,从所述第2摄像装置,取得从被配置在与所述第1摄像装置不同的位置的第2摄像装置到所述对象物的第2距离数据、以及通过对所述对象物和所述第1摄像装置进行摄像而得到的第2图像数据;对所述第2图像数据中的第1摄像装置的形状进行检测的步骤;估计步骤,基于检测结果,估计所述第1摄像装置的位置;距离计算步骤,基于所述第1摄像装置的位置以及所述第2距离数据,计算从所述第1摄像装置到所述对象物的第1距离数据;以及参数计算步骤,使用所述第1距离数据,计算用于将所述对象物的计测点的像素位移量换算为实际尺寸位移量的所述校正参数,所述对象物的计测点的像素位移量基于由所述第1摄像装置在相互不同的定时摄像的2个以上的第3图像数据。
12.另外,本公开的一个方式所涉及的校正参数计算方法计算用于使用图像对实际尺寸物理量进行计测的校正参数,该实际尺寸物理量是对象物在实际空间中的物理量的实际尺寸值,所述校正参数计算方法包括:第1取得步骤,从第1摄像装置取得通过对所述对象物进行摄像而得到的第1图像数据;第2取得步骤,从所述第2摄像装置,取得从被配置在与所述第1摄像装置不同的位置的第2摄像装置到所述对象物的第2距离数据、以及通过对所述对象物进行摄像而得到的第2图像数据;建立对应步骤,将所述第1图像数据中的所述对象物的位置与所述第2图像数据中的所述对象物的位置建立对应;估计步骤,基于建立对应结果以及所述第2距离数据,估计所述第1摄像装置相对于所述第2摄像装置的位置;距离计算步骤,基于所述第1摄像装置的位置以及所述第2距离数据,计算从所述第1摄像装置到所述对象物的第1距离数据;以及参数计算步骤,使用所述第1距离数据,计算用于将所述对象物的计测点在像素上的物理量换算为所述实际空间上的物理量的所述校正参数,所述对象物的计测点在像素上的物理量基于由所述第1摄像装置摄像的第3图像数据。
13.另外,本公开的一个方式所涉及的校正参数计算方法计算用于使用图像对对象物在实际空间中的物理量进行计测的校正参数,包括:第1取得步骤,从第1摄像装置取得通过对所述对象物进行摄像而得到的第1图像数据;第2取得步骤,从所述第2摄像装置,取得从被配置在与所述第1摄像装置不同的位置的第2摄像装置到所述对象物的第2距离数据、以及通过对所述对象物和所述第1摄像装置进行摄像而得到的第2图像数据;对所述第2图像数据中的第1摄像装置的形状进行检测的步骤;估计步骤,基于检测结果,估计所述第1摄像装置的位置;距离计算步骤,基于所述第1摄像装置的位置以及所述第2距离数据,计算从所述第1摄像装置到所述对象物的第1距离数据;以及参数计算步骤,使用所述第1距离数据,计算用于将所述对象物的计测点的像素物理量换算为所述实际空间上的实际尺寸物理量的所述校正参数,该对象物的计测点的像素物理量基于由所述第1摄像装置摄像的第3图像数据。
14.本公开的一个方式所涉及的位移量计算方法包括:第4取得步骤,取得通过使用上述校正参数计算方法计算的所述校正参数;第5取得步骤,取得所述2个以上的第3图像数据;以及换算步骤,基于所述校正参数,将所述2个以上的第3图像数据中的所述像素位移量换算为所述实际尺寸位移量。
15.本公开的一个方式所涉及的校正参数计算装置计算用于使用图像对实际尺寸位
移量进行计测的校正参数,该实际尺寸位移量是表示对象物的运动的位移的实际尺寸值,所述校正参数计算装置具备:第1取得部,从第1摄像装置取得通过对所述对象物进行摄像而得到的第1图像数据;第2取得部,从所述第2摄像装置,取得从被配置在与所述第1摄像装置不同的位置的第2摄像装置到所述对象物的第2距离数据、以及通过对所述对象物进行摄像而得到的第2图像数据;匹配部,将所述第1图像数据中的所述对象物的位置与所述第2图像数据中的所述对象物的位置建立对应;位置估计部,基于建立对应结果以及所述第2距离数据,估计所述第1摄像装置相对于所述第2摄像装置的位置;距离计算部,基于所述第1摄像装置的位置以及所述第2距离数据,计算从所述第1摄像装置到所述对象物的第1距离数据;以及参数计算部,使用所述第1距离数据,计算用于将所述对象物的计测点的像素位移量换算为实际尺寸位移量的所述校正参数,所述对象物的计测点的像素位移量基于由所述第1摄像装置在相互不同的定时摄像的2个以上的第3图像数据。
16.另外,本公开的一个方式所涉及的校正参数计算装置计算用于使用图像对实际尺寸位移量进行计测的校正参数,该实际尺寸位移量是表示对象物的运动的位移的实际尺寸值,所述校正参数计算装置具备:第1取得部,从第1摄像装置取得通过对所述对象物进行摄像而得到的第1图像数据;第2取得部,从所述第2摄像装置,取得从被配置在与所述第1摄像装置不同的位置的第2摄像装置到所述对象物的第2距离数据、以及通过对所述对象物和所述第1摄像装置进行摄像而得到的第2图像数据;位置估计部,对所述第2图像数据中的第1摄像装置的形状进行检测,基于检测出的检测结果,估计所述第1摄像装置的位置;距离计算部,基于所述第1摄像装置的位置以及所述第2距离数据,计算从所述第1摄像装置到所述对象物的第1距离数据;以及参数计算部,使用所述第1距离数据,计算用于将所述对象物的计测点的像素位移量换算为实际尺寸位移量的所述校正参数,所述对象物的计测点的像素位移量基于由所述第1摄像装置在相互不同的定时摄像的2个以上的第3图像数据。
17.另外,本公开的一个方式所涉及的校正参数计算装置计算用于使用图像对实际尺寸物理量进行计测的校正参数,该实际尺寸物理量是对象物在实际空间中的物理量的实际尺寸值,所述校正参数计算装置具备:第1取得部,从第1摄像装置取得通过对所述对象物进行摄像而得到的第1图像数据;第2取得部,从所述第2摄像装置,取得从被配置在与所述第1摄像装置不同的位置的第2摄像装置到所述对象物的第2距离数据、以及通过对所述对象物进行摄像而得到的第2图像数据;建立对应匹配部,将所述第1图像数据中的所述对象物的位置与所述第2图像数据中的所述对象物的位置建立对应;位置估计部,基于建立对应结果以及所述第2距离数据,估计所述第1摄像装置相对于所述第2摄像装置的位置;距离计算部,基于所述第1摄像装置的位置以及所述第2距离数据,计算从所述第1摄像装置到所述对象物的第1距离数据;以及参数计算部,使用所述第1距离数据,计算用于将所述对象物的计测点在像素上的物理量换算为所述实际空间上的物理量的所述校正参数,所述对象物的计测点在像素上的物理量基于由所述第1摄像装置摄像的第3图像数据。
18.另外,本公开的一个方式所涉及的校正参数计算装置计算用于使用图像对对象物在实际空间中的物理量进行计测的校正参数,具备:第1取得部,从第1摄像装置取得通过对所述对象物进行摄像而得到的第1图像数据;第2取得部,从所述第2摄像装置,取得从被配置在与所述第1摄像装置不同的位置的第2摄像装置到所述对象物的第2距离数据、以及通过对所述对象物和所述第1摄像装置进行摄像而得到的第2图像数据;位置估计部,对所述
第2图像数据中的第1摄像装置的形状进行检测,基于检测出的检测结果,估计所述第1摄像装置的位置;距离计算部,基于所述第1摄像装置的位置以及所述第2距离数据,计算从所述第1摄像装置到所述对象物的第1距离数据;以及参数计算部,使用所述第1距离数据,计算将所述对象物的计测点的像素物理量换算为所述实际空间上的实际尺寸物理量的所述校正参数,该对象物的计测点的像素物理量基于由所述第1摄像装置摄像的第3图像数据。
19.本公开的一个方式所涉及的位移量计算装置具备:第3取得部,取得通过使用上述的校正参数计算装置计算的所述校正参数;第4取得部,取得所述2个以上的第3图像数据;以及换算部,基于所述校正参数,将所述2个以上的第3图像数据中的所述像素位移量换算为所述实际尺寸位移量。
20.发明效果
21.根据本公开的一个方式所涉及的校正参数计算方法等,能够高精度而且容易地将位移量换算为实际尺寸值。
附图说明
22.图1是表示实施方式1所涉及的位移计测系统的概略构成的图。
23.图2是表示实施方式1所涉及的位移计测系统的功能构成的框图。
24.图3是表示实施方式1所涉及的位移计测系统的动作的流程图。
25.图4是用于说明实施方式1所涉及的匹配部中的特征点匹配的图。
26.图5是用于说明实施方式1所涉及的位移的实际尺寸换算方法的图。
27.图6是表示实施方式1的变形例所涉及的位移计测系统的动作的流程图。
28.图7a是用于说明实施方式1的变形例所涉及的考虑了位移方向的位移校正的第1图。
29.图7b是用于说明实施方式1的变形例所涉及的考虑了位移方向的位移校正的第2图。
30.图8是用于说明实施方式1的变形例所涉及的位移的实际尺寸换算方法的图。
31.图9是表示实施方式2所涉及的位移计测系统的概略构成的图。
32.图10是表示实施方式2所涉及的位移计测系统的功能构成的框图。
33.图11是表示实施方式2所涉及的第1摄像装置上粘贴的标记的一例的图。
34.图12是表示实施方式2所涉及的位移计测系统的动作的流程图。
具体实施方式
35.(达成本公开的经过)
36.在专利文献1所记载的摄像装置中,如上述也说明的那样,为了高精度地计测对象物的状态,需要以相机的光轴与距离计测装置的光轴平行的方式设置相机和距离计测装置。在专利文献1中,使用专用的安装器材以使相机的光轴与距离计测装置的光轴平行。
37.但是,在使用图像计测位移时,期望能够高精度而且容易地计测位移量等物理量的实际尺寸值。例如,希望即使相机的光轴与距离计测装置的光轴不平行,也能够像专利文献1那样高精度地计测位移。另外,期望例如不用准备专用的安装器材等就能够容易地计测位移的实际尺寸值。
38.另外,作为用于计测位移的实际尺寸值的其他方法,有如下方法:摄像包含要计测位移的对象物中长度已知的特定部分的图像,基于与该特定部分对应的图像上的部分的像素数、以及已知的长度,计算用于将1个像素换算为实际尺寸值的校正值。但是,在该方法中,该特定部分优选是平面。也就是说,该方法关于对象物的该特定部分的形状存在制约,难以对形状复杂的对象物的计测点的位移的实际尺寸值进行计测。
39.另外,在该方法中,虽然能够高精度地计测该特定部分处的位移的实际尺寸值,但难以高精度地计测该特定部分以外的部分处的位移的实际尺寸值。这是因为,在从摄像装置到特定部分的距离与从摄像装置到该特定部分以外的部分的距离不同的情况下,对各个部分而言的恰当的校正值不同。另外,在该方法中,如果特定部分的长度不是已知的,则无法对位移的实际尺寸值进行计测。
40.于是,发明人们针对设置相机和距离计测装置时的制约以及由于对象物的形状引起的制约较少的、也就是说用于容易而且高精度地对位移的实际尺寸值进行计测的校正参数计算方法等进行了努力探讨,提出了以下说明的校正参数计算方法等。
41.本公开的一个方式所涉及的校正参数计算方法计算用于使用图像对实际尺寸位移量进行计测的校正参数,该实际尺寸位移量是表示对象物的运动的位移的实际尺寸值,所述校正参数计算方法包括:第1取得步骤,从第1摄像装置取得通过对所述对象物进行摄像而得到的第1图像数据;第2取得步骤,从所述第2摄像装置,取得从被配置在与所述第1摄像装置不同的位置的第2摄像装置到所述对象物的第2距离数据、以及通过对所述对象物进行摄像而得到的第2图像数据;建立对应步骤,将所述第1图像数据中的所述对象物的位置与所述第2图像数据中的所述对象物的位置建立对应;估计步骤,基于建立对应结果以及所述第2距离数据,估计所述第1摄像装置相对于所述第2摄像装置的位置;距离计算步骤,基于所述第1摄像装置的位置以及所述第2距离数据,计算从所述第1摄像装置到所述对象物的第1距离数据;以及参数计算步骤,使用所述第1距离数据,计算用于将所述对象物的计测点的像素位移量换算为实际尺寸位移量的所述校正参数,所述对象物的计测点的像素位移量基于由所述第1摄像装置在相互不同的定时摄像的2个以上的第3图像数据。
42.由此,根据校正参数计算方法,能够基于估计的第1摄像装置的位置计算从第1摄像装置到对象物的第1距离,因此无需以第1摄像装置的光轴与第2摄像装置的光轴平行的方式设置第1摄像装置和第2摄像装置。另外,根据校正参数计算方法,能够基于第1距离计算校正参数,因此即使对象物的特定部分的长度未知,也能够计算用于将像素位移量换算为实际尺寸位移量的校正参数。
43.另外,根据校正参数计算方法,通过估计第1距离,能够准确地取得从第1摄像装置到对象物的距离。因此,根据校正参数计算方法,通过使用该第1距离计算校正参数,能够取得能够计算更准确的实际尺寸位移量的校正参数。例如,与使用第2距离的情况相比,能够取得用于计算精度更高的实际尺寸位移量的校正参数。由此,根据本公开所涉及的校正参数计算方法,通过使用利用该校正参数计算方法计算的校正参数来计算位移量,能够在使用图像计测位移时高精度而且容易地将位移量换算为实际尺寸值。
44.本公开的一个方式所涉及的校正参数计算方法计算用于使用图像对实际尺寸位移量进行计测的校正参数,该实际尺寸位移量是表示对象物的运动的位移的实际尺寸值,所述校正参数计算方法包括:第1取得步骤,从第1摄像装置取得通过对所述对象物进行摄
像而得到的第1图像数据;第2取得步骤,从所述第2摄像装置,取得从被配置在与所述第1摄像装置不同的位置的第2摄像装置到所述对象物的第2距离数据、以及通过对所述对象物和所述第1摄像装置进行摄像而得到的第2图像数据;对所述第2图像数据中的第1摄像装置的形状进行检测的步骤;估计步骤,基于检测结果,估计所述第1摄像装置的位置;距离计算步骤,基于所述第1摄像装置的位置以及所述第2距离数据,计算从所述第1摄像装置到所述对象物的第1距离数据;参数计算步骤,使用所述第1距离数据,计算用于将所述对象物的计测点的像素位移量换算为实际尺寸位移量的所述校正参数,所述对象物的计测点的像素位移量基于由所述第1摄像装置在相互不同的定时摄像的2个以上的第3图像数据。
45.由此,能够仅使用第2图像数据及距离数据来估计第1摄像装置的位置信息,因此不受从图像中得到的特征点的位置或数量影响,而能够估计第1摄像装置的位置信息。也就是说,能够容易地估计第1摄像装置的位置信息。
46.另外,根据校正参数计算方法,通过估计第1距离,能够准确地取得从第1摄像装置到对象物的距离。因此,根据校正参数计算方法,通过使用该第1距离计算校正参数,能够取得能够计算更准确的实际尺寸位移量的校正参数。例如,与使用第2距离的情况相比,能够取得用于计算精度更高的实际尺寸位移量的校正参数。由此,根据本公开所涉及的校正参数计算方法,通过使用利用该校正参数计算方法计算的校正参数来计算位移量,能够在使用图像计测位移时高精度而且容易地将位移量换算为实际尺寸值。
47.另外,例如,所述对象物中的要计测所述位移的计测点有2个以上,在所述距离计算步骤中,计算从2个以上的计测点各自到所述第1摄像装置的2个以上的所述第1距离数据,在所述参数计算步骤中,基于2个以上的所述第1距离数据,按所述2个以上的计测点中的每个计测点计算与该计测点对应的校正值作为所述校正参数。
48.由此,根据校正参数计算方法,针对多个计测点各自计算校正值,因此能够高精度地计算多个计测点各自的实际尺寸位移量。
49.另外,例如,在所述距离计算步骤中,计算从包括所述2个以上的计测点在内的所述对象物的多个表面点各自到所述第1摄像装置的多个所述第1距离数据,在所述参数计算步骤中,基于多个所述第1距离数据,按所述多个表面点中的每个表面点计算与该表面点对应的校正值,基于计算出的多个校正值生成校正值映射作为所述校正参数。
50.由此,根据校正参数计算方法,在希望计测除了计测点以外的位置处的实际尺寸位移量的情况下,通过使用校正值映射,能够容易地计测该实际尺寸位移量。因此,校正参数计算方法的便利性得到提高。
51.另外,例如还包括:第3取得步骤,取得表示所述对象物的位移的方向的位移方向信息,在所述参数计算步骤中,还使用所述位移方向信息计算所述校正参数。
52.由此,根据校正参数计算方法,在从上方观察对象物时,对象物在与第1摄像装置的摄像面交叉的方向上位移的情况下,能够使用位移方向信息计算校正值,因此能够精度更高地计测该位移的实际尺寸值。
53.另外,例如,所述第1摄像装置具有第1相机,所述第2摄像装置具有摄像所述第2图像数据的第2相机、以及计测所述第2距离数据的深度传感器,所述第1相机比所述第2相机分辨率高或者帧率高。
54.由此,基于由黑白相机摄像的黑白图像数据,能够取得对象物在黑白图像数据上
的像素位移量。一般而言,黑白相机与彩色相机相比能够摄像更精细的图像。因此,通过基于由黑白相机摄像的黑白图像对位移进行计测,能够高精度地计测该位移。另外,深度传感器容易获得,因此能够提供通用性优异的校正参数计算方法。
55.本公开的一个方式所涉及的位移量计算方法包括:第4取得步骤,取得通过使用上述校正参数计算方法计算的所述校正参数;第5取得步骤,取得所述2个以上的第3图像数据;以及换算步骤,基于所述校正参数,将所述2个以上的第3图像数据中的所述像素位移量换算为所述实际尺寸位移量。
56.由此,能够使用利用上述校正参数计算方法计算的校正参数来计测实际尺寸位移量,因此能够高精度而且容易地计测对象物的实际尺寸位移量。
57.本公开的一个方式所涉及的校正参数计算装置计算用于使用图像对实际尺寸位移量进行计测的校正参数,该实际尺寸位移量是表示对象物的运动的位移的实际尺寸值,所述校正参数计算装置具备:第1取得部,从第1摄像装置取得通过对所述对象物进行摄像而得到的第1图像数据;第2取得部,从所述第2摄像装置,取得从被配置在与所述第1摄像装置不同的位置的第2摄像装置到所述对象物的第2距离数据、以及通过对所述对象物进行摄像而得到的第2图像数据;匹配部,将所述第1图像数据中的所述对象物的位置与所述第2图像数据中的所述对象物的位置建立对应;位置估计部,基于建立对应结果以及所述第2距离数据,估计所述第1摄像装置相对于所述第2摄像装置的位置;距离计算部,基于所述第1摄像装置的位置以及所述第2距离数据,计算从所述第1摄像装置到所述对象物的第1距离数据;以及参数计算部,使用所述第1距离数据,计算用于将所述对象物的计测点的像素位移量换算为实际尺寸位移量的所述校正参数,所述对象物的计测点的像素位移量基于由所述第1摄像装置在相互不同的定时摄像的2个以上的第3图像数据。
58.由此,能够获得与上述的校正参数计算方法同样的效果。具体而言,根据校正参数计算装置,能够基于估计的第1摄像装置的位置计算从第1摄像装置到对象物的第1距离,因此无需以第1摄像装置的光轴与第2摄像装置的光轴平行的方式设置第1摄像装置和第2摄像装置。另外,根据校正参数计算装置,能够基于第1距离计算校正参数,因此即使对象物的特定部分的长度未知,也能够计算用于将像素位移量换算为实际尺寸位移量的校正参数。
59.另外,根据校正参数计算装置,通过估计第1距离,能够准确地取得从第1摄像装置到对象物的距离。因此,根据校正参数计算装置,通过使用该第1距离计算校正参数,能够取得能够计算更准确的实际尺寸位移量的校正参数。例如,与使用第2距离的情况相比,能够取得用于计算精度更高的实际尺寸位移量的校正参数。由此,根据上述的校正参数计算装置,通过使用由该校正参数计算装置计算的校正参数来计算位移量,能够在使用图像计测位移时高精度而且容易地将位移量换算为实际尺寸值。
60.本公开的一个方式所涉及的校正参数计算装置计算用于使用图像对实际尺寸位移量进行计测的校正参数,该实际尺寸位移量是表示对象物的运动的位移的实际尺寸值,所述校正参数计算装置具备:第1取得部,从第1摄像装置取得通过对所述对象物进行摄像而得到的第1图像数据;第2取得部,从所述第2摄像装置,取得从被配置在与所述第1摄像装置不同的位置的第2摄像装置到所述对象物的第2距离数据、以及通过对所述对象物和所述第1摄像装置进行摄像而得到的第2图像数据;位置估计部,对所述第2图像数据中的第1摄像装置的形状进行检测,基于检测出的检测结果,估计所述第1摄像装置的位置;距离计算
部,基于所述第1摄像装置的位置以及所述第2距离数据,计算从所述第1摄像装置到所述对象物的第1距离数据;以及参数计算部,使用所述第1距离数据,计算用于将所述对象物的计测点的像素位移量换算为实际尺寸位移量的所述校正参数,所述对象物的计测点的像素位移量基于由所述第1摄像装置在相互不同的定时摄像的2个以上的第3图像数据。
61.由此,能够获得与上述的校正参数计算方法同样的效果。具体而言,校正参数计算装置能够仅使用第2图像数据及距离数据来估计第1摄像装置的位置信息,因此能够容易地估计第1摄像装置的位置信息。
62.另外,根据校正参数计算装置,通过估计第1距离,能够准确地取得从第1摄像装置到对象物的距离。因此,根据校正参数计算装置,通过使用该第1距离计算校正参数,能够取得能够计算更准确的实际尺寸位移量的校正参数。例如,与使用第2距离的情况相比,能够取得用于计算精度更高的实际尺寸位移量的校正参数。由此,根据上述的校正参数计算装置,通过使用由该校正参数计算装置计算的校正参数来计算位移量,能够在使用图像计测位移时高精度而且容易地将位移量换算为实际尺寸值。
63.本公开的一个方式所涉及的位移量计算装置具备:第3取得部,取得通过使用上述的校正参数计算装置计算的所述校正参数;第4取得部,取得所述2个以上的第3图像数据;以及换算部,基于所述校正参数,将所述2个以上的第3图像数据中的所述像素位移量换算为所述实际尺寸位移量。
64.由此,能够获得与上述的位移量计算方法同样的效果。
65.此外,这些整体性或者具体性的方式也可以通过系统、方法、集成电路、计算机程序或者计算机能够读取的cd-rom等非易失性记录介质实现,也可以通过系统、方法、集成电路、计算机程序或者记录介质的任意组合实现。程序既可以被预先存储于记录介质,也可以经由包含互联网等在内的广域通信网络向记录介质供给。
66.以下,关于实施方式,参照附图具体进行说明。
67.此外,以下说明的实施方式及变形例均表示概括性或者具体性的例子。以下的实施方式及变形例中示出的数值、形状、材料、构成要素、构成要素的配置位置及连接方式、步骤、步骤的顺序等为一例,其意图不在于限定本公开。此外,关于以下实施方式中的构成要素之中独立权利要求中未记载的构成要素,作为任意的构成要素而被说明。
68.此外,各图是示意图,不一定必须被严密地图示。另外,各图中,针对实质上相同的构成附加相同的标记,并有时省略或者简化重复的说明。
69.另外,在本说明书中,正交、相等等表示要素间的关系性的用语以及数值不是仅表示严密的含义的表现,而是意味着也包含实质上等同的范围、例如几%程度的差异在内的表现。
70.另外,在以下的说明书中,图像是静止图像,但也可以是动态图像。
71.(实施方式1)
72.以下,参照图1~图5说明实施方式1所涉及的校正参数计算方法等。
73.[1-1.位移计测系统的构成]
[0074]
首先,参照图1及图2说明具备用于执行实施方式1所涉及的校正参数计算方法的校正参数计算部110的位移计测系统1。图1是表示实施方式1所涉及的位移计测系统1的概略构成的图。图2是表示实施方式1所涉及的位移计测系统1的功能构成的框图。
[0075]
如图1所示,实施方式1所涉及的位移计测系统1是使用被配置在相互不同的位置的2个摄像装置对对象物60的位移的实际尺寸值进行计测的信息处理系统。第1摄像装置10及第2摄像装置20从相互不同的视点对对象物60进行摄像。对象物60是计测位移的对象,例如是在马达等动作时进行位移(振动等)的设备,但不限定于此,例如也可以是基础设施构造物等由于来自外部的应力而位移(变形等)的构造物。基础设施构造物例如是供汽车或者铁路车辆等车辆行驶的桥梁。此外,本说明书中的位移不仅包含对象物60的振动,也包含对象物60的变形及位置的变化。位移也可以认为表示对象物的运动。
[0076]
如图1及图2所示,位移计测系统1具备第1摄像装置10、第2摄像装置20、位移计测装置30、输出装置40和输入装置50。
[0077]
第1摄像装置10摄像用于计测对象物60的位移的图像。第1摄像装置10所摄像的图像被用于检测与对象物60的位移对应的图像上的位移量(像素数)。此外,以下将第1摄像装置10所摄像的图像也记作第1图像,将与对象物60的位移对应的图像上的位移量也记作像素位移量。像素位移量是像素上的物理量(例如像素数)的一例。另外,第1图像也可以被用于计算后述的校正值。
[0078]
第1摄像装置10例如是黑白相机。换言之,第1图像例如是黑白图像。此外,第1摄像装置10不限定于黑白相机,也可以是彩色相机。第1摄像装置10例如是具有图像传感器的数字摄像机或者数字照相机。此外,第1摄像装置10是摄像装置的一例。第1摄像装置10所具有的黑白相机或者彩色相机是第1相机的一例。第1相机比后述的第2相机分辨率高或者帧率高。第1相机例如是能够摄像比第2相机高的分辨率的图像、或者能够以比第2相机高的帧率摄像图像的相机。
[0079]
第2摄像装置20摄像用于计测对象物60的位移的实际尺寸值的图像。第2摄像装置20具有如下构成:能够取得通过对对象物60进行摄像而得到的图像、以及从第2摄像装置20到对象物60的距离。第2摄像装置20所摄像的图像以及第2摄像装置20所计测的距离被用于估计第1摄像装置10的位置。此外,以下将第2摄像装置20所摄像的图像也记作第2图像,将对象物60的位移的实际尺寸值也记作实际尺寸位移量。实际尺寸位移量是实际空间中的物理量(例如与像素数对应的距离)的一例。另外,从第2摄像装置20到对象物60的距离是第2距离的一例。
[0080]
第2摄像装置20具有用于摄像第2图像的摄像部、以及用于计测距离的距离计测部。摄像部例如是彩色相机,但也可以是黑白相机。摄像部能够取得对象物60的灰度图像即可。距离测定部例如具有深度传感器。深度传感器能够计测距对象物60的1点或者多点的距离,例如基于激光抵达对象物60并返回为止的时间,取得第2摄像装置20与对象物60的距离(例如位置关系)。深度传感器例如也可以是激光雷达。此外,距离测定部不限定于具有深度传感器,例如也可以具有tof方式的传感器。第2摄像装置20例如既可以是摄像部与距离计测部一体构成,也可以是摄像部与距离计测部以能够拆卸的方式构成。此外,第2摄像装置20是计测装置的一例。第2摄像装置20所具有的黑白相机或者彩色相机是第2相机的一例。
[0081]
在对象物60的位移为规定值以下的情况下,第1摄像装置10与第2摄像装置20例如也可以在相互不同的定时对同一对象物60进行摄像。另外,在对象物60的位移比规定值大的情况下,第1摄像装置10与第2摄像装置20例如也可以进行同步并对对象物60进行摄像。规定值基于位移的误差的允许值等设定为佳。
[0082]
另外,第2摄像装置20在被设置之后进行至少1次摄像及计测即可。关于第2摄像装置20的摄像部所进行的摄像以及距离计测部所进行的计测,在对象物60的位移为规定值以下的情况下也可以在相互不同的定时进行,在对象物60的位移比规定值大的情况下同步进行为佳。
[0083]
第1摄像装置10及第2摄像装置20各自也可以被固定以在摄像时位置不变动。另外,第2摄像装置20被配置在第1摄像装置10附近为佳。第1摄像装置10及第2摄像装置20各自被配置在能够取得包含对象物60的各个计测点的图像的位置为佳。
[0084]
第1图像既可以是分辨率比第2图像高的图像,也可以是以帧率比第2图像高的摄像条件摄像的图像。此外,在实施方式1中,第1图像是黑白图像,第2图像是彩色图像,但不限定于此。
[0085]
位移计测装置30是基于从第1摄像装置10及第2摄像装置20取得的图像数据及距离数据计算用于将像素位移量换算为实际尺寸位移量的校正值、并使用计算出的校正值输出对象物60的实际尺寸位移量的信息处理装置。位移计测装置30例如也可以是服务器装置。位移计测装置30具有校正参数计算部110、位移检测部120和位移量计算部130。
[0086]
校正参数计算部110基于从第1摄像装置10及第2摄像装置20取得的图像数据及距离数据,计算用于将像素位移量换算为实际尺寸位移量的校正值。校正参数计算部110具有第1取得部111、第2取得部112、匹配部113、位置估计部114、距离计算部115和校正值计算部116。
[0087]
第1取得部111从第1摄像装置10取得表示第1图像的第1图像数据。
[0088]
第2取得部112从第2摄像装置20取得距离图像数据。第2取得部112例如取得表示第2图像的第2图像数据、以及距离数据。
[0089]
第1取得部111及第2取得部112是与第1摄像装置10及第2摄像装置20分别经由无线通信或者有线通信以能够进行通信的方式连接的通信接口(通信电路)。
[0090]
匹配部113通过第1图像数据及第2图像数据的特征点匹配,将第1图像数据中的对象物60的位置与第2图像数据中的对象物60的位置建立对应。匹配部113例如将第1图像数据及第2图像数据中的对象物60的位置(例如像素位置)建立对应。由此,匹配部113取得表示第1图像数据中的对象物60的位置及第2图像数据中的对象物60的位置的对应关系的对应信息。特征点检测方式可以使用sift(scale invariant feature transform:尺度不变特征变换)等任意的现有技术。
[0091]
位置估计部114基于对应信息、距离数据及第1摄像装置10的内部参数,估计第1摄像装置10的位置。具体而言,位置估计部114估计第2摄像装置20的坐标系中的第1摄像装置10的位置。此外,第1摄像装置10的内部参数设为已知。另外,内部参数例如是3行
×
3列的参数矩阵(cameramatrix)、透镜的失真系数(distcoeffs)、焦距等中的至少1个。
[0092]
距离计算部115基于表示第1摄像装置10的位置的位置信息、以及距离数据,计算表示从第1摄像装置10到对象物60的距离的距离信息。距离计算部115例如计算从第1摄像装置10到对象物60的1个以上的计测点各自的距离。距离计算部115例如也可以计算距对象物60中的包含要计测位移的计测点在内的多个表面点的距离。然后,距离计算部115也可以生成将从第1摄像装置10到对象物60的距离排列而成的距离映射(map)。此外,对象物60的计测点的数量不特别限定,也可以是2个以上。
[0093]
校正值计算部116基于第1摄像装置10的位置、从第1摄像装置10到对象物60的距离、以及第1摄像装置10的内部参数,计算用于将像素位移量换算为实际尺寸位移量的校正值。关于校正值计算部116计算校正值在后文叙述。另外,校正值计算部116例如也可以针对多个表面点中的各个表面点计算校正值,并生成将计算出的校正值排列而成的校正值映射。此外,校正值及校正值映射是校正参数的一例。另外,校正值计算部116是参数计算部的一例。
[0094]
此外,说明了校正参数计算部110被内置于位移计测装置30的例子,但不限定于此。校正参数计算部110也可以作为单独的装置实现。在该情况下,校正参数计算部110作为校正参数计算装置发挥功能。
[0095]
此外,位移计测装置30是位移量计算装置的一例。
[0096]
位移检测部120基于第1摄像装置10所摄像的2个以上的第1图像数据,检测与对象物60的位移对应的图像上的像素位移量(像素数)。位移检测部120例如按每个计测点检测像素位移量。
[0097]
位移量计算部130基于像素位移量、以及表示校正参数的校正信息,将像素位移量换算为实际尺寸位移量,从而计算对象物60的实际尺寸位移量。位移量计算部130例如基于对象物60的多个计测点各自的校正值、以及该多个计测点各自的像素位移量,计算该多个计测点各自的实际尺寸位移量。
[0098]
输出装置40是从位移计测装置30取得包括实际尺寸位移量的提示信息、并输出所取得的提示信息的装置。输出装置40例如是将提示信息作为图像显示的显示装置。输出装置40例如是液晶显示器等。输出装置40所输出的图像供作业员视觉辨认。
[0099]
输出装置40既可以是固定型的装置,也可以是作业员所持的便携终端所具有的装置。只要便携终端具有输出装置40而且能够与位移计测装置30进行通信,则不特别限定,例如也可以是智能电话、平板电脑等。在便携终端具有输出装置40的情况下,作业员通过在对象物60的周边处确认便携终端的输出装置40,能够知晓实际尺寸位移量。此外,作业员是用户的一例。
[0100]
位移计测系统1也可以不仅具备显示装置而且还具备输出声音的装置作为输出装置40,或者也可以具备输出声音的装置替代显示装置作为输出装置40。另外,位移计测系统1也可以具备投影机等在对象物(例如屏幕)上显示提示信息的装置作为输出装置40。另外,在位移计测装置30被配置在远程地点的情况下,位移计测装置30与输出装置40也可以经由网络连接。
[0101]
输入装置50是从作业员受理计测位移时的规定信息的用户界面。输入装置50例如既可以从作业员受理用于计算校正值的信息,也可以受理与对象物60的位移方向相关的信息,还可以受理与第1摄像装置10的大致位置相关的信息。另外,输入装置50也可以通过语音受理规定的信息的输入。此外,大致位置是第1摄像装置10的设置位置的估计值。
[0102]
输入装置50由硬件按键(硬件按钮)、滑动开关、触摸面板等实现。输入装置50既可以是固定型的装置,也可以是作业员所持的便携终端所具有的装置。
[0103]
[1-2.位移计测系统的动作]
[0104]
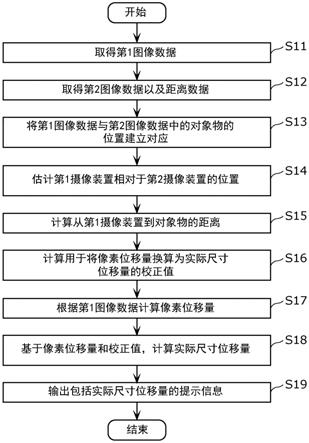
接下来,参照图3~图5说明位移计测系统1的动作。图3是表示实施方式1所涉及的位移计测系统1的动作的流程图。具体而言,图3是表示位移计测装置30的动作的流程图。另
外,图3所示的步骤s11~步骤s16表示校正参数计算部110的动作。另外,图4是用于说明实施方式1所涉及的匹配部113中的特征点匹配的图。此外,在图4中,表示了对象物60a为家具的例子。另外,为了使特征点的说明易懂,在特征点的一部分上粘贴了qr(快速响应(quick response))码。各个qr码也可以与对象物60a的计测点对应设置。
[0105]
如图3所示,第1取得部111从第1摄像装置10取得表示第1图像的第1图像数据(s11)。第1取得部111例如取得如图4的(a)所示的第1图像数据i1。在图4的(a)中,“〇”所示的位置(x,y)例如表示第1图像数据i1上的特征点的像素位置。在图4的(a)中,图示了5个特征点的位置。另外,在第1图像数据i1中映现出qr码。
[0106]
此外,第1取得部111为了计算校正值,在步骤s11中取得至少1张第1图像数据即可。另外,第1取得部111为了计测位移,在步骤s11中取得在相互不同的定时摄像的2个以上的第1图像数据即可。
[0107]
第1取得部111在取得了多个第1图像数据的情况下,将至少1张第1图像数据向匹配部113输出,而且将2个以上的第1图像数据向位移检测部120输出。第1取得部111既可以向匹配部113及位移检测部120输出相互不同的第1图像数据,也可以向匹配部113及位移检测部120输出至少一部分相同的第1图像数据。向位移检测部120输出的2个以上的第1图像数据是在相互不同的定时摄像的图像数据,是第3图像数据的一例。另外,步骤s11是第1取得步骤的一例。另外,步骤s11也可以是后述的位移量计算方法中的第5取得步骤的一例。另外,第1取得部111也可以作为取得2个以上的第3图像数据的第4取得部发挥功能。
[0108]
接下来,第2取得部112从第2摄像装置20取得表示第2图像的第2图像数据以及表示距离的距离数据(s12)。第2取得部112例如取得如图4的(b)所示的表示第2图像数据以及距离数据的距离图像数据i2。距离图像数据i2包括:表示相对于第2摄像装置20而言的对象物60的位置(例如在图4的(b)中由“〇”表示)的坐标(x,y,z)、以及表示该位置处的颜色的像素值(r,g,b)。坐标(x,y,z)是以第2摄像装置20的位置为基准(例如坐标(0,0,0))的坐标。距离数据是第2距离数据的一例。
[0109]
此外,距离图像数据i2也可以不包括颜色的信息。距离图像数据i2只要是能够与第1图像数据i1进行特征点匹配的图像,而且是包括表示相对于第2摄像装置20而言的对象物60的位置的坐标(x,y,z)的图像即可。距离图像数据i2例如也可以是对象物60的灰度已知的图像,而且是包括表示相对于第2摄像装置20而言的对象物60的位置的坐标(x,y,z)的数据。距离图像数据i2也可以包括通过对对象物60进行摄像而得到的黑白图像或者灰度图像。
[0110]
第2取得部112将距离图像数据i2向匹配部113及位置估计部114输出。此外,第2图像数据是包括表示颜色的像素值(r,g,b)的数据,距离数据是包括表示相对于第2摄像装置20而言的对象物60的位置的坐标(x,y,z)的数据。另外,步骤s12是第2取得步骤的一例。
[0111]
接下来,匹配部113将第1图像数据i1与距离图像数据i2的第2图像数据中的对象物60的位置建立对应(s13)。使用图4所示的第1图像数据i1及距离图像数据i2进行说明,例如提取5个位置的特征点匹配候选(例如在图4的(a)及(b)中为“〇”),将第1图像数据i1与距离图像数据i2的位置建立对应。匹配部113将第1图像数据i1中的像素位置(x,y)与距离图像数据i2中的坐标(x,y,z)建立对应。匹配部113例如通过确定第1图像数据i1上的像素位置(x,y)处的对象物60的部分处于距离图像数据i2上的哪个位置,由此进行关联。
[0112]
然后,匹配部113例如根据第1图像数据i1中的像素位置(x,y)与第2图像数据中的像素位置(x1,y1)的对应,将第1图像数据i1中的像素位置(x,y)与距离数据中的与该像素位置(x,y)对应的坐标(x,y,z)建立对应。匹配部113将与该像素位置对应的距离数据,与第1图像数据i1上的像素位置(x,y)建立关系。
[0113]
匹配部113例如决定5组特征点的组,但特征点的组不限定于5组,而根据对应关系的取得方法等适宜决定。匹配部113例如也可以决定4组特征点的组,也可以决定6组特征点的组。此外,对应关系的计算方法及特征点的数量等是一例,不限定于上述情况。以下将特征点的组的数量记作n组。
[0114]
匹配部113将表示第1图像数据i1与第2图像数据的位置的对应关系的对应信息向位置估计部114输出。匹配部113例如输出表示上述决定的5组的特征点的对应信息。此外,步骤s13是建立对应步骤的一例。
[0115]
接下来,位置估计部114基于对应信息、距离数据及第1摄像装置10的内部参数,估计第1摄像装置10相对于第2摄像装置20的位置(s14)。如果第1图像数据i1与距离图像数据i2的n组的特定点的对应关系已知,则位置估计部114通过求解pnp问题(n点透视问题(perspective-n-point problem)),能够估计第2摄像装置20的坐标系中的第1摄像装置10的位置。此外,第1摄像装置10的内部参数设为已知。
[0116]
位置估计部114例如使用重投影误差为基准值以下的特征点的各个组,计算r(旋转)及t(位置),从而估计第1摄像装置10相对于第2摄像装置20的位置及姿态。位置估计部114例如计算使重投影误差最小的r(旋转矩阵)及t(平移矢量)。r(旋转矩阵)是表示第1摄像装置10的姿态的外部参数。t(平移矢量)是表示第1摄像装置10的位置的外部参数。此外,位置估计部114至少估计位置即可。
[0117]
匹配部113及位置估计部114例如也可以利用为了去除特征点的错误对应而减小偏离值的影响的健壮估计,执行估计第1摄像装置10的位置的处理。匹配部113及位置估计部114例如也可以通过作为健壮估计的一例的ransac(随机抽样一致(random sample consensus))估计、中值估计、m估计等,估计第1摄像装置10的位置。ransac估计例如也可以是基于重投影误差的估计方法。重投影误差通过如下的方差表现:通过使用对2个坐标系进行换算的函数而得到的将距离数据上的第1位置(xi,yi,zi)投影到的第2图像数据上的第2位置(xi,yi)、和与该第2位置对应的第1图像数据上的第3位置(xi0,yi0)的方差。对2个坐标系进行换算的函数例如是projectpoints函数等。
[0118]
匹配部113例如随机选择n组特征点的组,计算第1摄像装置10的位置。然后,匹配部113计算n组之中的重投影误差为基准值以下的特定点的组的数量。匹配部113在图像中的全部特征点中,反复进行上述的处理,决定重投影误差为基准值以下的特定点的组的数量最大的n组特征点。然后,位置估计部114例如也可以使用该n组特征点,估计第1摄像装置10的位置。此外,n组例如也可以是6组。也就是说,位置估计部114也可以通过求解p6p问题,估计第1摄像装置10的位置。
[0119]
像这样,由匹配部113及位置估计部114取得第1图像数据i1与第2图像数据中的对象物60的特征点的对应关系,而且,使用该对应关系估计第1摄像装置10的位置。也就是说,实施方式1所涉及的位移计测装置30即使第1摄像装置10及第2摄像装置20的设置位置及设置姿态不同,也能够估计第1摄像装置10的位置。
[0120]
位置估计部114将表示估计的第1摄像装置10的位置的位置信息向距离计算部115输出。此外,步骤s14是估计步骤的一例。
[0121]
距离计算部115基于位置信息及距离数据,计算从第1摄像装置10到对象物60的距离(s15)。距离计算部115基于位置信息中包含的第1摄像装置10的位置(坐标)、以及基于距离数据的对象物60的坐标(x,y,z),计算从第1摄像装置10到对象物60的距离。也可以说,距离计算部115将第2摄像装置20的距离计测部所计测的距对象物60的距离,换算为从第1摄像装置10观察的距对象物60的距离。由此,取得从第1摄像装置10观察时的对象物60的位置。例如,确定从第1摄像装置10观察时的距对象物60的各计测点的距离。包括距离计算部115所计算的距离(从第1摄像装置10到对象物60的距离)的数据是第1距离数据的一例。另外,距离计算部115所计算的距离是第1距离的一例。距离计算部115将表示第1摄像装置10与对象物60的距离的距离信息向校正值计算部116输出。此外,步骤s15是距离计算步骤的一例。
[0122]
校正值计算部116计算用于基于第1摄像装置10的位置、距离信息及第1摄像装置10的内部参数将像素位移量换算为实际尺寸位移量的校正值(s16)。校正值计算部116例如按对象物60的多个计测点中的每个计测点计算校正值。校正值例如包括表示该计测点处的与1个像素对应的实际尺寸值的信息。步骤s16是参数计算步骤的一例。另外,步骤s16也可以是第4取得步骤的一例。
[0123]
在此,参照图5说明校正值计算部116的处理。图5是用于说明实施方式1所涉及的位移的实际尺寸换算方法的图。此外,在图5中,表示了对象物60在与第1摄像装置10的摄像面(投影面)平行的方向上位移的例子。图5所示的光学中心o表示第1摄像装置10的透镜11的中心,位置p1(x,y)表示与对象物60在第1时刻的计测点的位置m1(x,y,z)对应的摄像面上的位置,图像上的位移(δx1,δy1)表示与在不同于第1时刻的第2时刻的该计测点的位置m2对应的摄像面上的位置p2与位置p1之差。位移(δx1,δy1)是图像上的像素数。
[0124]
如图5所示,三角形
△
op1p2与三角形
△
om1m2处于相似的关系,校正值计算部116例如使用该相似的关系,计算用于将像素位移量换算为实际尺寸位移量的校正值。如果将第1摄像装置10的摄像面中的图像中心(cx,cy)与光学中心o的距离设为焦距f,则光学中心o到位置p1的距离l1如下计算:
[0125][0126]
第1时刻例如是对象物60未位移的初始的时刻。
[0127]
另外,如果将实际尺寸位移量设为位移(dx1,dy1),则由于三角形
△
op1p2与三角形
△
om1m2处于相似的关系,关于光学中心o与位置m1的距离l2,下式成立:
[0128]
l2:l1=dy1:δy1=dx1:δx1
ꢀꢀꢀꢀ
(式2)
[0129]
根据(式2)可知,如果距离l2即从光学中心o到位置m1的距离已知,则能够计算作为实际尺寸位移量的位移(dx1,dy1)。距离l2按每个计测点可能不同,因此距离计算部115按每个计测点计算距离l2。
[0130]
校正值计算部116基于上述的(式2),计算校正值。用于计算位移dx1的校正值是基于(式2)的校正值,为l2/l1。另外,用于计算位移dy1的校正值也是基于(式2)的校正值,为l2/l1。
[0131]
此外,图像中心(cx,cy)及焦距f作为第1摄像装置10的内部参数被取得。校正值计
算部116也可以使用图表图像来计算第1摄像装置10的内部参数。
[0132]
校正值计算部116将表示计算出的校正值的校正信息向位移量计算部130输出。位移量计算部130从校正值计算部116取得校正信息。位移量计算部130作为取得校正参数的第3取得部发挥功能。
[0133]
接下来,位移检测部120根据第1图像数据i1,计算对象物60的位移在该第1图像数据i1上的像素位移量(s17)。位移检测部120例如根据被投影在第1摄像装置10的摄像面上的对象物60的位移,计算像素位移量。位移检测部120例如按对象物60的多个计测点中的每个计测点,计算该计测点的位移为图像上的几个像素。位移检测部120将计算出的像素位移量向位移量计算部130输出。
[0134]
位移量计算部130基于像素位移量和校正值,计算实际尺寸位移量(s18)。位移量计算部130按对象物60的多个计测点中的每个计测点,对该计测点的像素位移量以及该计测点的校正值进行运算,从而计算该计测点的实际尺寸位移量。像这样,位移量计算部130作为基于校正信息将2个以上的第3图像数据中的像素位移量换算为实际尺寸位移量的换算部发挥功能。
[0135]
位移量计算部130将包括计算出的实际尺寸位移量的提示信息向输出装置40输出(s19)。然后,输出装置40将从位移量计算部130取得的提示信息作为图像显示。此外,步骤s19是换算步骤的一例。
[0136]
此外,图3所示的直到步骤s11~步骤s16的动作,既可以在每次执行用于计算对象物60的实际尺寸位移量的处理时进行,也可以在第1摄像装置10及第2摄像装置20中的至少一方的设置位置、姿态及相机参数(包括内部参数)中的至少1个每次变更时进行。另外,校正值计算部116也可以将计算出的校正值存储至存储部(未图示)。然后,校正值计算部116也可以在计算对象物60的实际尺寸位移量的情况下,从存储部读出校正值,并将读出的校正值向位移量计算部130输出。也就是说,校正值计算部116也可以将过去计算的校正值,用作用于计算当前的实际尺寸位移量的校正值。由此,能够减小校正参数计算部110的处理量。
[0137]
上述的步骤s11~步骤s16是在用于计算校正参数的校正参数计算方法中执行的处理。另外,上述的步骤s17~步骤s19是在用于计算实际尺寸位移量的位移量计算方法中执行的处理。此外,位移量计算方法也可以包括步骤s11~步骤s16的处理。
[0138]
如上述那样,实施方式1所涉及的位移计测系统1具备:被配置在相互不同的位置的第1摄像装置10及第2摄像装置20、以及具有校正参数计算部110的位移计测装置30。校正参数计算部110基于从第1摄像装置10取得的第1图像数据i1、以及从第2摄像装置20取得的距离图像数据i2,估计第1摄像装置10的位置。位移计测装置30由校正参数计算部110估计第1摄像装置10的位置,因此即使在初始状态下第1摄像装置10及第2摄像装置20的位置及姿态不同,也能够高精度地计算位移的实际尺寸值。
[0139]
像这样,根据位移计测系统1,对于第1摄像装置10及第2摄像装置20的位置及姿态的制约较少,因此无需精细地调整第1摄像装置10及第2摄像装置20的位置及姿态。因此,能够缩短计测现场中的设置时间。另外,与通过多视点方式计测对象物60的实际尺寸位移量的情况相比,要设置的摄像装置的数量较少,因此能够容易地在计测现场进行摄像装置的设置及回收。
[0140]
另外,如上述那样,校正参数计算部110例如使用估计的第1摄像装置10的位置,计算用于将像素位移量换算为实际尺寸位移量的校正值。由此,即使对于未粘贴刻度标记的对象物60、或者特定部分的实际尺寸长度未知的对象物60,校正参数计算部110也能够计测该对象物60的实际尺寸位移量。
[0141]
另外,如上述那样,校正参数计算部110例如按对象物60的多个计测点中的每个计测点计算校正值。由此,作业者无需在意第1摄像装置10与多个计测点各自的距离之差,而能够选择计测点。也就是说,根据校正参数计算部110,选择计测点的自由度增大。
[0142]
另外,位移计测装置30使用第1摄像装置10所摄像的2个以上的第1图像数据,计测对象物60的位移的实际尺寸位移量。由此,即使对象物60的位移基于使用激光位移计等无法计测的程度的周期的振动,位移计测装置30也能够计测实际尺寸位移量。
[0143]
此外,在本实施方式中,说明了实际空间中的物理量是实际尺寸位移量的例子,但不限定于此。实际空间中的物理量只要是能够根据图像数据取得的物理量则不特别限定,例如也可以是长度、面积等。另外,实际空间中的物理量也可以是基于多个帧的实际尺寸位移量的、位移的速度等。在该情况下,在参数计算步骤(相当于s16)中,使用第1距离数据,计算用于将对象物60的计测点在像素上的物理量换算为实际空间上的物理量的校正参数,该对象物60的计测点在像素上的物理量基于由第1摄像装置10在相互不同的定时摄像的2个以上的第3图像数据。另外,在该情况下,本实施方式中说明的位移计测装置30也可以说是物理量计测装置。
[0144]
计算用于计算这样的实际空间中的物理量的校正参数的校正参数计算方法如下所示。例如也可以是一种校正参数计算方法,计算用于使用图像对实际尺寸物理量进行计测的校正参数,该实际尺寸物理量是对象物60在实际空间中的物理量的实际尺寸值,校正参数计算方法包括:第1取得步骤(相当于s11),从第1摄像装置10取得通过对对象物60进行摄像而得到的第1图像数据i1;第2取得步骤(相当于s12),从第2摄像装置20取得从被配置在与第1摄像装置10不同的位置的第2摄像装置20到对象物60的第2距离数据、以及通过对对象物60进行摄像而得到的第2图像数据;建立对应步骤(相当于s13),将第1图像数据i1中的对象物60的位置与第2图像数据中的对象物60的位置建立对应;估计步骤(s14),基于建立对应结果和第2距离数据,估计第1摄像装置10相对于第2摄像装置20的位置;距离计算步骤(s15),基于第1摄像装置10的位置和第2距离数据,计算从第1摄像装置10到对象物60的距离数据;以及参数计算步骤(相当于s16),使用第1距离数据,计算用于将对象物60的计测点在像素上的物理量换算为实际空间上的物理量的校正值(校正参数的一例),该对象物60的计测点在像素上的物理量基于第1摄像装置10所摄像的第3图像数据。
[0145]
另外,例如也可以作为校正参数计算装置110实现,校正参数计算装置110计算用于使用图像对实际尺寸物理量进行计测的校正参数,该实际尺寸物理量是对象物60在实际空间中的物理量的实际尺寸值。例如,校正参数计算装置110也可以具备:第1取得部111,从第1摄像装置10取得通过对对象物60进行摄像而得到的第1图像数据;第2取得部112,从第2摄像装置20取得从被配置在与第1摄像装置10不同的位置的第2摄像装置20到对象物60的第2距离数据、以及通过对对象物60进行摄像而得到的第2图像数据;建立对应匹配部113,将第1图像数据中的对象物60的位置与第2图像数据中的对象物60的位置建立对应;位置估计部114,基于建立对应结果和第2距离数据,估计第1摄像装置10相对于第2摄像装置20的
位置;距离计算部115,基于第1摄像装置10的位置和第2距离数据,计算从第1摄像装置10到对象物60的第1距离数据;以及校正值计算部116,使用第1距离数据,计算用于将对象物60的计测点在像素上的物理量换算为实际空间上的物理量的校正参数,该对象物60的计测点在像素上的物理量基于第1摄像装置10所摄像的第3图像数据。
[0146]
(实施方式1的变形例)
[0147]
以下,参照图6~图8说明本变形例所涉及的校正参数计算方法等。此外,在以下的说明中,以与实施方式1的区别点为中心进行说明,关于与实施方式1同样的构成赋予相同的标记,并有时省略或者简化说明。本变形例所涉及的位移计测系统的构成与实施方式1所涉及的位移计测系统1同样,省略说明。
[0148]
本变形例所涉及的位移计测系统1在如下方面具有特征:即使在对象物60的位移方向与相对于第1摄像装置10的摄像面(投影面)水平的方向不同的情况下,也能够高精度地计算实际尺寸位移量。图6是表示本变形例所涉及的位移计测系统1的动作的流程图。
[0149]
如图6所示,校正值计算部116取得对象物60的位移方向信息(s21)。校正值计算部116例如也可以经由输入装置50取得位移方向信息。例如在对象物60为马达的情况下,位移方向信息也可以是表示基于马达的驱动部的驱动方向的位移方向的信息。另外,例如在对象物60的位移方向在设计上能够预测的情况下,位移方向信息也可以是表示预测的位移方向的信息。另外,例如在对象物60是桥梁等且从车辆等受到应力的情况下,位移方向信息也可以是表示受到该应力的方向(例如铅直方向)的信息。另外,位移方向信息例如也可以是表示相对于第1摄像装置10的摄像面的方向的信息。另外,位移方向信息所表示的位移方向不限定于1个,也可以是2个以上。步骤s21是第3取得步骤的一例。
[0150]
此外,位移方向信息不限定于经由输入装置50取得。位移方向信息例如也可以基于2个以上的距离图像数据i2(例如第2图像数据)被决定。在该情况下,第2取得部112从第2摄像装置20取得在相互不同的定时摄像的2个以上的距离图像数据i2,并将取得的至少2个以上的距离图像数据i2向校正值计算部116输出(未图示)。校正值计算部116也可以基于2个以上的距离图像数据i2各自中包含的规定的计测点的位置(x,y,z)确定位移方向,从而取得位移方向信息。通过使用2个以上的距离图像数据i2,在位移是周期短的振动等的情况下,虽然难以准确地计测实际尺寸位移量,但能够取得位移方向。
[0151]
另外,也可以根据距离图像数据i2取得对象物60上的位移计测点的面的朝向,并以该面的朝向为基准(基于面的法线方向或与面平行的方向等)定义位移方向。
[0152]
此外,位移方向信息也可以基于第1图像数据i1取得。对象物60例如也可以如图4的(a)所示被粘贴有qr码。另外,针对该qr码也可以存储有与对象物60的位移方向相关的信息。校正值计算部116也可以基于第1图像数据i1中包含的qr码,取得对象物60的位移方向。在该情况下,位移方向例如是以粘贴有qr码的对象物60的面为基准的方向。
[0153]
此外,只要能够基于第1图像数据i1取得位移方向信息,则并不限定于在对象物60上粘贴有qr码。例如,也可以在对象物60上粘贴有ar标记。另外,校正值计算部116例如也可以基于第1图像数据i1中包含的ar标记,取得作为与该ar标记建立了对应的信息的位移方向信息。该位移方向信息例如也可以被重叠在第1图像数据i1上显示。
[0154]
然后,校正值计算部116基于第1摄像装置10的位置、距离信息、第1摄像装置10的内部参数、以及位移方向信息,计算用于将像素位移量换算为实际尺寸位移量的校正值
(s22)。也就是说,校正值计算部116在实施方式1的基础上,还使用位移方向信息来计算校正值。此外,步骤s22是参数计算步骤的一例。
[0155]
在此,参照图7a及图7b说明使用位移方向信息进行位移校正。图7a是用于说明本变形例所涉及的考虑了位移方向的位移校正的第1图。另外,图7b是用于说明本变形例所涉及的考虑了位移方向的位移校正的第2图。
[0156]
图7a及图7b是从上方观察的对象物60b的俯瞰图。另外,对象物60b的形状为了方便而设为正方形。
[0157]
如图7a及图7b所示,在从上方观察对象物60b的情况下,对象物60b的位移方向相对于第1摄像装置10的摄像面不平行时,在摄像面上,仅投影出对象物60b的位移之中的在与该摄像面平行的方向上的位移。在图7a中,位移方向是将纸面的左上与右下连结的方向。在该情况下,例如,如果对象物60b的计测点的位移设为a1,则被投影至摄像面上的对象物60b的计测点的位移成为a2。位移a2是位移a1中的与摄像面平行的方向上的分量。
[0158]
另外,在图7b中,位移方向是将纸面的左下与右上连结的方向。在该情况下,例如,如果对象物60b的计测点的位移设为b1,则被投影至摄像面上的对象物60b的计测点的位移成为b2。位移b2是位移b1中的与摄像面平行的方向上的分量。例如,在位移a1的方向与位移b1的方向是相互正交的方向而且位移量相等的情况下,摄像面上的位移a2及b2的方向及大小相等。此外,位移a1及b1是实际尺寸位移量,例如是实际尺寸值。另外,位移a2及b2是像素位移量,例如是像素数。
[0159]
像这样,实际的位移方向不同的位移a1及b1在摄像面上有时被检测为方向相同的位移。这虽然能够计测与摄像面水平的方向上的位移,却无法计测与摄像面垂直的方向上的位移。
[0160]
于是,在本变形例中,校正值计算部116如上述也说明的那样,在步骤s21取得对象物60的位移方向信息,在步骤s22中使用该位移方向信息,计算用于将第1图像数据i1上的对象物60的像素位移量换算为实际尺寸位移量的校正值。在此,校正值包括与1个像素对应的实际尺寸值、以及表示位移方向的信息。校正值例如也可以包括表示与1个像素对应的实际尺寸值(xa,yb,zc)的信息。实际尺寸值xa表示在摄像面上偏离1个像素时的在实际空间的3维正交坐标系中向x轴方向的位移的实际尺寸值。实际尺寸值xb表示在摄像面上偏离1个像素时的在实际空间的3维正交坐标系中向y轴方向的位移的实际尺寸值。xc表示在摄像面上偏离1个像素时的在实际空间的3维正交坐标系中向z轴方向的位移的实际尺寸值。实际尺寸值(xa,yb,zc)是校正参数的一例。此外,校正值的计算方法不限定于上述情况。
[0161]
在此,参照图8说明校正值计算部116的处理。图8是用于说明本变形例所涉及的位移的实际尺寸换算方法的图。
[0162]
如图8所示,如果将与对象物60在第1时刻的计测点的位置m1(x,y,z)对应的摄像面上的位置p1设为(x,y),则从光学中心o到位置p1的距离l1能够通过(式1)计算。第1时刻例如是对象物60未位移的初始的时刻。另外,如果将与不同于第1时刻的第2时刻的计测点的位置m3对应的摄像面上的位置p3与位置p1之差(位移)设为(δx2,δy2),则第1校正值能够通过(式2)计算。在此,第1校正值是能够计算与第1摄像装置10的摄像面平行的方向上的位移的实际尺寸位移量的值。第1校正值例如是能够根据图像上的位移(δx2,δy2)计算实际尺寸值的位移(dx2,dy2,dz2)之中的位移(dx2,dy2)的值。
[0163]
校正值计算部116基于计算出的第1校正值、以及位移方向信息,将该第1校正值换算为作为3维信息的第2校正值。校正值计算部116计算用于将作为表示摄像面上的位移的2维信息的像素位移量换算为作为3维信息的实际尺寸位移量的第2校正值。校正值计算部116也可以基于第1校正值、以及第1摄像装置10的摄像面与位移方向所成的角度,计算第2校正值。第2校正值例如是能够根据图像上的位移(δx2,δy2)计算实际尺寸值的位移(dx2,dy2,dz2)的值。此外,校正值计算部116计算第2校正值的方法不限定于上述情况。
[0164]
如上述那样,本变形例所涉及的位移计测系统1的校正参数计算部110还使用表示对象物60的位移方向的位移方向信息,计算用于将像素位移量转换为实际尺寸位移量的校正值。
[0165]
由此,在从上方观察对象物60时,对象物60在与第1摄像装置10的摄像面交叉的方向上位移的情况下,位移计测系统1能够使用位移方向信息计算校正值,因此能够高精度地计测该位移的实际尺寸值。
[0166]
(实施方式2)
[0167]
[2-1.位移计测系统的构成]
[0168]
参照图9~图11说明实施方式2所涉及的位移计测系统1a的构成。图9是表示实施方式2所涉及的位移计测系统1a的概略构成的图。图10是表示实施方式2所涉及的位移计测系统1a的功能构成的框图。实施方式2所涉及的位移计测装置30a与实施方式1所涉及的位移计测装置30主要的不同点在于,第2取得部112从第2摄像装置20取得包括第1摄像装置10的第2图像数据及距离数据,而且,位置估计部114仅使用第2图像数据及距离数据来估计第1摄像装置10的位置信息。此外,在以下的说明中,以与实施方式1的区别点为中心进行说明,关于与实施方式1同样的构成赋予相同的标记,并有时省略或者简化说明。
[0169]
如图9所示,实施方式2所涉及的位移计测系统1a是使用被配置在相互不同的位置的2个摄像装置对对象物60的位移的实际尺寸值进行计测的信息处理系统。第1摄像装置10及第2摄像装置20从相互不同的视点对对象物60进行摄像。
[0170]
如图9及图10所示,位移计测系统1a具备第1摄像装置10、第2摄像装置20、位移计测装置30a、输出装置40和输入装置50。
[0171]
第2摄像装置20摄像包括第1摄像装置10及对象物60的图像。第2摄像装置20既可以摄像以能够检测第1摄像装置10的形状的程度包括该第1摄像装置10的图像,在第1摄像装置10的壳体上被附加了标记的情况下,也可以以映现出该标记的方式进行摄像。第2摄像装置20例如摄像包括构成第1摄像装置10的多个面之中的至少1个面的图像。
[0172]
另外,第2摄像装置20以第1摄像装置10与对象物60不重叠的位置或者姿态进行摄像为佳。第2摄像装置20例如也可以被配置在第1摄像装置10的后方。
[0173]
位移计测装置30a与实施方式1的位移计测装置30的不同点在于,不具备匹配部113。
[0174]
第1取得部111从第1摄像装置10取得表示包括对象物60的第1图像的第1图像数据。然后,第1取得部111将取得的第1图像数据向位移检测部120输出。
[0175]
第2取得部112从第2摄像装置20取得表示包括第1摄像装置10及对象物60的第2图像的第2图像数据、以及距离数据。
[0176]
位置估计部114根据距离数据或者第2图像数据,对第1摄像装置10进行检测。第1
摄像装置10的外观、大小及形状中的至少1个预先已知,因此位置估计部114也可以通过2维或者3维的模式匹配来检测第1摄像装置10。另外,位置估计部114也可以利用第1摄像装置10的壳体或透镜、或者如图11所示的被附加在第1摄像装置10的壳体上的标记等,对第1摄像装置10进行检测。
[0177]
图11是表示实施方式2所涉及的第1摄像装置10被粘贴的标记200的一例的图。图11的(a)表示标记200被粘贴在第1摄像装置10的上表面的状态。图11(b)表示标记200被粘贴在第1摄像装置10的侧面的状态。在第1摄像装置10上至少粘贴有1个标记。
[0178]
另外,位置估计部114基于检测出的第1摄像装置10的位置,决定光学中心的3维位置坐标。相对于第1摄像装置10的壳体等的光学中心位置,能够针对第2相机及透镜的组合根据设计值决定,或者事先通过光学校准来求出。位置估计部114向距离计算部115输出包括以求出的光学中心为基准(原点)的情况下的第1摄像装置10的位置坐标在内的位置信息。此外,位移计测系统1a所具备的其他构成以及动作与实施方式1同样。在实施方式2中,由于位置估计部114仅使用第2图像数据及距离数据来估计第1摄像装置10的位置信息,因此具有如下优点:不受从图像中得到的特征点的位置或者数量影响,而能够估计第1摄像装置10的位置信息。
[0179]
[2-2.位移计测系统的动作]
[0180]
接下来,参照图12说明位移计测系统1a的动作。图12是表示实施方式2所涉及的位移计测系统1a的动作的流程图。具体而言,图12是表示位移计测装置30a的动作的流程图。
[0181]
如图12所示,第1取得部111从第1摄像装置10取得表示第1图像的第1图像数据(s11)。第1取得部111例如取得如图4的(a)所示的第1图像数据i1。步骤s11是第1取得步骤的一例。
[0182]
接下来,第2取得部112从第2摄像装置20取得表示第2图像的第2图像数据以及表示距离的距离数据(s31)。第2取得部112从第2摄像装置20取得表示包括对象物60及第1摄像装置10这双方在内的第2图像数据、以及表示距离的距离数据。第2取得部112将取得的第2图像数据及距离数据向位置估计部114输出。步骤s31是第2取得步骤的一例。
[0183]
位置估计部114根据距离数据或者第2图像数据,对第1摄像装置10进行检测。位置估计部114例如根据距离数据或者第2图像数据,检测第2图像数据中的第1摄像装置10(s32)。位置估计部114例如通过上述的方法检测第2图像数据中的第1摄像装置10的形状。
[0184]
然后,位置估计部114基于检测出的第1摄像装置10的位置,估计光学中心的3维位置坐标。位置估计部114也可以说是基于检测出的第1摄像装置10的位置,估计第1摄像装置10相对于第2摄像装置20的位置(s33)。换言之,位置估计部114不使用2个图像的对应信息,而估计第1摄像装置10的位置。位置估计部114向距离计算部115输出包括以求出的光学中心为基准(原点)的第1摄像装置10的位置坐标在内的位置信息。此外,位置信息也包括由第2取得部112取得的距离数据。
[0185]
步骤s15以后的处理与实施方式1同样,因此省略说明。
[0186]
像这样,根据位移计测系统1a,位置估计部114使用包括第1摄像装置10的第2图像数据、以及距离数据,估计第1摄像装置10的位置信息,因此不受2个图像的特征点的位置或者数量影响,而能够估计第1摄像装置10的位置信息。
[0187]
此外,在本实施方式中,说明了实际空间中的物理量是实际尺寸位移量的例子,但
不限定于此。实际空间中的物理量只要是能够根据图像数据取得的物理量则不特别限定,例如也可以是长度、面积等。另外,实际空间中的物理量也可以是基于多个帧的实际尺寸位移量的、位移的速度等。在该情况下,在参数计算步骤(相当于s16)中,使用第1距离数据,计算用于将对象物60的计测点在像素上的物理量换算为实际空间上的物理量的校正参数,该对象物60的计测点在像素上的物理量基于由第1摄像装置10在相互不同的定时摄像的2个以上的第3图像数据。另外,在该情况下,本实施方式中说明的位移计测装置30a也可以说是物理量计测装置。
[0188]
另外,例如也可以是一种校正参数计算方法,计算用于使用图像对对象物在实际空间中的物理量进行计测的校正参数,包括:第1取得步骤(相当于s11),从第1摄像装置10取得通过对对象物60进行摄像而得到的第1图像数据i1;第2取得步骤(相当于s31),从第2摄像装置20取得从被配置在与第1摄像装置10不同的位置的第2摄像装置20到对象物的第2距离数据、以及通过对对象物60和第1摄像装置10进行摄像而得到的第2图像数据;对第2图像数据中的第1摄像装置10的形状进行检测的步骤(相当于s32);估计步骤(相当于s33),基于检测结果,估计第1摄像装置10的位置;距离计算步骤(相当于s15),基于第1摄像装置10的位置和第2距离数据,计算从第1摄像装置10到对象物60的第1距离数据;以及参数计算步骤(相当于s16),使用第1距离数据,计算用于将对象物60的计测点的像素物理量换算为实际空间上的实际尺寸物理量的校正值(校正参数的一例),该对象物60的计测点的像素物理量基于由第1摄像装置10摄像的第3图像数据。
[0189]
另外,例如也可以作为计算用于使用图像对对象物在实际空间中的物理量进行计测的校正参数的校正参数计算装置110实现。例如,校正参数计算装置110也可以具备:第1取得部111,从第1摄像装置10取得通过对对象物60进行摄像而得到的第1图像数据;第2取得部112,从第2摄像装置20取得从被配置在与第1摄像装置10不同的位置的第2摄像装置20到对象物60的第2距离数据、以及通过对对象物60和第1摄像装置10进行摄像而得到的第2图像数据;位置估计部114,对第2图像数据中的第1摄像装置10的形状进行检测,基于检测出的检测结果,估计第1摄像装置10的位置;距离计算部115,基于第1摄像装置10的位置和第2距离数据,计算从第1摄像装置10到对象物60的第1距离数据;以及校正值计算部116,使用第1距离数据,计算用于将对象物60的计测点的像素物理量换算为实际空间上的实际尺寸物理量的校正参数,该对象物60的计测点的像素物理量基于由第1摄像装置10摄像的第3图像数据。
[0190]
(其他实施方式)
[0191]
以上,基于实施方式1、实施方式2及变形例(以后也记作实施方式等)说明了本公开的1个或者多个方式所涉及的校正参数计算方法等,但本公开不限定于该实施方式等。只要不脱离本公开的主旨,对实施方式等施加了本领域技术人员所想到的各种变形而得到的方式、将不同的实施方式中的构成要素组合而构筑的方式,也可以都包含在本公开的1个或者多个方式的范围内。
[0192]
例如,在上述实施方式等中,说明了第1摄像装置及第2摄像装置是被固定于地面的摄像装置的例子,但不限定于此。第1摄像装置及第2摄像装置中的至少1个例如也可以是被设置在无人机等飞行体上的摄像装置。
[0193]
另外,在上述实施方式等中,说明了第1取得部及第2取得部是通信部的例子,但不
限定于此。第1取得部及第2取得部中的至少1个例如也可以是供记录介质连接的连接部。连接部例如也可以是供usb(通用串行总线(universal serial bus))连接的usb端子、供sd卡插入的sd卡插槽、供光盘插入的光驱等。
[0194]
另外,流程图中的各步骤执行的顺序是为了具体说明本公开而例示的顺序,也可以是上述以外的顺序。另外,上述步骤的一部分也可以与其他步骤同时(并行)地执行。
[0195]
另外,框图中的功能模块的分割是一例,也可以将多个功能模块作为一个功能模块实现,或者将一个功能模块分割为多个,或者将一部分功能转移至其他功能模块。另外,也可以将具有相似的功能的多个功能模块的功能,由单一的硬件或者软件并列或者分时地处理。
[0196]
另外,上述实施方式等中的校正参数计算装置既可以由单一的装置实现,也可以由相互连接的多个装置实现。在校正参数计算装置由多个装置实现的情况下,校正参数计算装置所具备的构成要素无论怎样向多个装置分配皆可。
[0197]
另外,在上述实施方式等中,说明了位移计测装置不具有输出装置,也就是说位移计测装置与输出装置分体的例子,但位移计测装置也可以具有输出装置。在该情况下,输出装置作为位移计测装置的一部分即输出部(例如显示部)发挥功能。
[0198]
另外,关于上述实施方式等中的位移计测系统所具备的装置间的通信方法,不特别限定。在装置间,既可以进行无线通信,也可以进行有线通信。另外,在装置间,也可以将无线通信及有线通信组合。
[0199]
另外,上述实施方式等中的计算装置所具备的构成要素的一部分或者全部也可以由1个系统lsi(大规模集成电路(large scale integration))构成。
[0200]
系统lsi是将多个处理部集成在1个芯片上制造的超多功能lsi,具体而言,是包含微处理器、rom(只读存储器(read only memory))、ram(随机存取存储器(random access memory))等而构成的计算机系统。在rom中,存储有计算机程序。通过微处理器依照计算机程序进行动作,系统lsi达成其功能。
[0201]
此外,在此设为系统lsi,但根据集成度的差别,也有时称为ic、lsi、超级lsi、特级lsi。另外,集成电路化的方法不限于lsi,也可以由专用电路或者通用处理器实现。也可以利用在制造lsi后能够编程的fpga(field programmable gate array:现场可编程逻辑门阵列),或者可重构lsi内部的电路单元的连接及设定的可重构处理器。
[0202]
进而,如果随着半导体技术的进步或者衍生的其他技术而出现了置换lsi的形成集成电路的技术,当然也可以使用该技术来进行功能模块的集成。有适用生物技术等的可能性。
[0203]
另外,上述各种处理的全部或者一部分既可以由电子电路等硬件实现,也可以使用软件来实现。此外,基于软件的处理通过位移计测装置中包含的处理器执行存储器中存储的程序来实现。
[0204]
另外,本公开的一个方式也可以是用于使计算机执行校正参数计算方法中包含的特征性的各步骤的计算机程序。另外,本公开的一个方式也可以是记录有这样的程序的计算机能够读取的非易失性的记录介质。例如,也可以将这样的程序记录在记录介质上使其分发或者流通。例如,通过将被分发的程序安装至其他具有处理器的装置,并使该处理器执行该程序,能够使该装置进行上述各处理。
[0205]
工业实用性
[0206]
本公开能够广泛利用于在使用图像计测对象物的位移时对位移的实际尺寸值进行计测的装置等。
[0207]
附图标记说明:
[0208]
1、1a位移计测系统
[0209]
10 第1摄像装置
[0210]
11 透镜
[0211]
20 第2摄像装置
[0212]
30、30a位移计测装置
[0213]
40
ꢀꢀ
输出装置
[0214]
50 输入装置
[0215]
60、60a、60b对象物
[0216]
110 校正参数计算部(校正参数计算装置)
[0217]
111 第1取得部
[0218]
112 第2取得部
[0219]
113 匹配部
[0220]
114 位置估计部
[0221]
115 距离计算部
[0222]
116 校正值计算部(参数计算部)
[0223]
120 位移检测部
[0224]
130 位移量计算部
[0225]
200 标记
[0226]
a1、a2、b1、b2 位移
[0227]
f 焦距
[0228]
i1 第1图像数据
[0229]
i2 距离图像数据
[0230]
l1、l2 距离
[0231]
m1~m3、p1~p3、t 位置
[0232]
o 光学中心
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。