1.本发明属于海洋环境监测技术领域,具体的说,是涉及一种极地拖曳式海洋剖面测量仪定标方法。
背景技术:
2.全球气候显著变暖已经成为世界各国气候科学家共识。2000-2009年全球平均气温比1951-1980年升高了0.6℃,在此期间,北极的平均温度升高了近2℃,是全球平均温升的2倍以上,气候变暖在北极地区被明显放大,导致北极海冰储量快速减少。北极气候变化剧烈,海冰减少及其导致的天气气候效应是目前国际上最为关注的热点前沿研究领域。世界海洋科学家们也越来越关注北极和北冰洋海洋环境的特征和北极冰雪融化过程对于气候的影响等方面的研究。研究北极海冰变化和海-冰-气相互作用机理研究需要海-冰-气界面多参数如海洋环境的温度、盐度和深度的数据作为支撑。现今世界各国在夏季普遍利用破冰船组织北极科学考察,定点观测海洋和海冰的相关数据,考察集中在非常有限的夏季时间,导致对春季海冰融化以及秋季冻结等关键过程缺乏了解,而这些过程对于了解海冰过程极为关键。因此,单纯依靠船只获取北极海洋环境观测数据远不能满足各类需求。
3.通过传感器获取长期的北极海洋环境数据是解决这一问题的有效手段。在北冰洋中心区布放海-冰-气无人冰站观测系统,可获取长周期的气-冰界面、海冰内部和冰-水界面关键环境参数数据,为北冰洋海冰变化等关键科学问题提供关键现场观测数据。
4.冰基拖曳式海洋环境监测系统是此类观测系统的典型代表,该系统能以最少代价有效地将观测时间扩展至全年。系统可实现北冰洋气象及水文要素的自动、连续测量,记录海冰漂移轨迹,进行实时数据采集并通过铱星通信卫星将数据传回地面用户。系统包括冰基气象浮标和水下剖面浮标两部分构成,两部分之间由高强度拖曳电缆相连。冰基气象浮标布放在北极浮冰上随海浮冰漂移,水下剖面浮标定时做剖面运动,并在上升期间将剖面测量数据通过高强度拖曳电缆传输到冰基气象浮标,冰基气象浮标将数据处理后,采集的气象和水文数据汇同gps定位数据由铱星通信卫星传回地面用户。
5.水下剖面浮标的主要工作原理是靠水下控制单元控制电机驱动柱塞泵向可变体积的油囊排油和收油实现其鼓胀和缩小,从而改变水下剖面浮标的重力-浮力平衡,达到上升和下降的目的。可见,水下剖面浮标在海水中做剖面测量是在浮标重量恒定的情况下通过改变浮标在海水中的浮力来实现的,而浮力变化的大小取决于水下剖面浮标中油囊的体积变化量。
6.然而,海水流速对力的平衡有着重要影响,会改变水下剖面浮标升降的最高点与最低点的深度。浮体的压缩是影响浮力平衡的重要因素,需要按照弹性伸缩来考虑。而电缆的压缩是塑性的,会在布放一段时间内改变浮力。拖曳过程是变质量运动,在不同深度和不同流速条件下参与受力的电缆长度不同,受力也很不一样。水下浮体的姿态的拖曳阻力不同,对升降的垂直位置有决定性影响。此外,同样的浮力或净重力条件下,初速度不同,上升和下降的速度及深度和高度也会有所不同。可见,水下剖面浮标的运动姿态受到受力平衡、
力矩平衡、变质量运动、姿态控制多个因素的制约,其力学分析和仿真计算过程较复杂,数据模型建立困难。此外,在海洋观测领域中所使用的观测仪器和设备一般体积较大,外形复杂且不规则,对其体积难以测定,尤其是做水下剖面浮标需要时刻关注其运动中的浮力变化,测量精度要求较高,传统测量方法的测量精度已经不能满足实际工作需要。
技术实现要素:
7.本发明针对如何有效控制水下剖面浮标剖面运动的技术问题,提供了一种极地拖曳式海洋剖面测量仪定标方法,该方法能够对测量仪中的水下剖面浮标重心位置进行定量调整,从而有效调整浮力矩和重力矩,实现该水下剖面浮标可靠的上升到冰底和下沉至预定深度。
8.为了解决上述技术问题,本发明通过以下的技术方案予以实现:
9.本发明提供了一种极地拖曳式海洋剖面测量仪定标方法,该方法对水下剖面浮标的重心位置进行调整;按照如下步骤进行:
10.(1)水下剖面浮标组装完成后,将液压油全部吸入油缸内,使油囊缩至体积最小,并对水下剖面浮标抽真空;
11.(2)对水下剖面浮标称重,记录其在空气中的称重值fg;
12.(3)通过吊挂法测量水下剖面浮标的预测重心距离hg;
13.(4)将水下剖面浮标放入盛有淡水的标定水槽中,并通过上拉砝码或下拉砝码使水下剖面浮标在水中呈稳定的水平悬浮平衡状态,记录第一上拉砝码重量f
上1
以及第一上拉砝码距离标量h
上1
,或者第一下拉砝码重量f
下1
以及第一下拉砝码距离标量h
下1
;
14.(5)通过式(5)计算得到油囊缩至体积最小时水下剖面浮标的体积v1:
15.v1=(fg f
空
f
下1-f
上1
)(5)
16.式(5)中:v
1-油囊缩至体积最小时水下剖面浮标的体积;f
下1-第一下拉砝码重量;f
上1-第一上拉砝码重量;f
g-水下剖面浮标在空气中的称重值;f
空-水下剖面浮标在空气的浮力,标准值。
17.(6)通过式(7)计算得到油囊缩至体积最小时水下剖面浮标的浮心距离h
浮
:
[0018][0019]
式(7)中:h
浮-油囊缩至体积最小时水下剖面浮标的浮心距离;f
水-水下剖面浮标在水中的重量;h
g-水下剖面浮标的预测重心距离;f
下1-第一下拉砝码重量;h
下1-第一下拉砝码距离标量;f
上1-第一上拉砝码重量;h
上1-第一上拉砝码距离标量;v
1-油囊缩至体积最小时水下剖面浮标的体积;
[0020]
(7)将液压油全部排入油囊内,使油囊扩至体积最大;
[0021]
(8)将水下剖面浮标放入盛有淡水的标定水槽中,并通过上拉砝码或下拉砝码使水下剖面浮标在水中呈稳定的水平悬浮平衡状态,记录第二上拉砝码重量f
上2
或者第二下拉砝码重量f
下2
;
[0022]
(9)通过式(9)计算得到油囊扩至体积最大时水下剖面浮标的体积v2:
[0023]
v2=(fg f
空
f
下2-f
上2
)(9)
[0024]
式(9)中:v
2-油囊扩至体积最大时水下剖面浮标的体积;f
g-水下剖面浮标在空气
中的称重值;f
空-水下剖面浮标在空气的浮力;f
下2-第二下拉砝码重量;f
上2-第二上拉砝码重量;
[0025]
(10)通过式(10)计算得到油囊缩至体积最小时和油囊扩至体积最大时之间的体积变化量δv:
[0026]
δv=v
2-v1(10)
[0027]
式(10)中:δv-油囊缩至体积最小时和油囊扩至体积最大时之间的体积变化量;v
2-油囊扩至体积最大时水下剖面浮标的体积;v
1-油囊缩至体积最小时水下剖面浮标的体积;
[0028]
(11)通过式(11)计算得到油囊在海水中的最大浮力为:
[0029]f油
=δv*ρ
海水
(11)
[0030]
式(11)中:f
油-油囊在海水中的最大浮力;ρ
海水-海水密度;δv-油囊缩至体积最小时和油囊扩至体积最大时之间的体积变化量;
[0031]
(12)通过式(12)计算得到油囊缩至体积最小时水下剖面浮标在海水中的浮力f
浮收
:
[0032]f浮收
=ρ
海水
*v1(12)
[0033]
式(11)中:f
浮收-油囊缩至体积最小时水下剖面浮标在海水中的浮力;ρ
海水-海水密度;v
1-油囊缩至体积最小时水下剖面浮标的体积;
[0034]
(13)计算得到拖缆系统在海水中的净重力f
t
;
[0035]
(14)通过式(13)计算得到水下剖面浮标在海水中的重量fz:
[0036]fz
=f
浮收
0.5(f
油-f
t
)-g(13)
[0037]
式中:f
z-水下剖面浮标在海水中的重量;f
浮收-油囊缩至体积最小时水下剖面浮标在海水中的浮力;f
油-油囊在海水中的最大浮力;f
t-拖缆系统在海水中的净重力;g-水下剖面浮标的配重点与投放点由重力加速度引起的重力差,为固定值;
[0038]
(15)通过式(15)计算水下剖面浮标的海水重心距离h:
[0039][0040]
式(15)中:h-水下剖面浮标的海水重心距离;f
浮收-油囊缩至体积最小时水下剖面浮标在海水中的浮力;h
浮-油囊缩至体积最小时水下剖面浮标的浮心距离;f
油-油囊在海水中的最大浮力;h
油-油囊中心与原点距离,为固定值;f
z-水下剖面浮标在海水中的重量;
[0041]
(16)根据水下剖面浮标的海水重心距离h,配置水下剖面浮标的重心位置;
[0042]
(17)验证与精调配置结果。
[0043]
进一步地,步骤(3)中,所述吊挂法为将挂绳兜绕水下剖面浮标后吊起,调节挂绳位置使水下剖面浮标在水平方向上平衡,记录挂绳所在位置与原点之间的距离,即为水下剖面浮标的预测重心距离hg;所述原点为水下剖面浮标的吊挂点。
[0044]
进一步地,步骤(4)的具体操作如下:
[0045]
水下剖面浮标放入盛有淡水的标定水槽中,标定水槽上方安装有定滑轮;
[0046]
如果水下剖面浮标下沉,则将绳索一端与水下剖面浮标上部连接,另一端绕过定滑轮后与上拉砝码连接;通过调整上拉砝码的重量和绳索在水下剖面浮标的位置,使水下剖面浮标在水中呈稳定的水平悬浮平衡状态;记录第一上拉砝码重量f
上1
以及第一上拉砝
码距离标量h
上1
;
[0047]
如果水下剖面浮标上浮,则将绳索一端与水下剖面浮标下部连接,另一端与下拉砝码连接;通过调整下拉砝码的重量和绳索在水下剖面浮标的位置,使水下剖面浮标在水中呈稳定的水平悬浮平衡状态;记录第一下拉砝码重量f
下1
以及第一下拉砝码距离标量h
下1
;
[0048]
如果水下剖面浮标在水中呈稳定的水平悬浮平衡状态,则f
上1
和f
下1
均记为0。
[0049]
进一步地,步骤(8)的具体操作如下:
[0050]
水下剖面浮标放入盛有淡水的标定水槽中,标定水槽上方安装有定滑轮;
[0051]
如果水下剖面浮标下沉,则将绳索一端与水下剖面浮标上部连接,另一端绕过定滑轮后与上拉砝码连接;通过调整上拉砝码的重量和绳索在水下剖面浮标的位置,使水下剖面浮标在水中呈稳定的水平悬浮平衡状态;记录第二上拉砝码重量f
上2
;
[0052]
如果水下剖面浮标上浮,则将绳索一端与水下剖面浮标下部连接,另一端与下拉砝码连接;通过调整下拉砝码的重量和绳索在水下剖面浮标的位置,使水下剖面浮标在水中呈稳定的水平悬浮平衡状态;记录第二下拉砝码重量f
下2
;
[0053]
如果水下剖面浮标在水中呈稳定的水平悬浮平衡状态,则f
上2
和f
下2
均记为0。
[0054]
进一步地,步骤(13)中,拖缆系统在海水中的净重力f
t
等于1/2长度的压缩后拖曳电缆在海水中的净重量与其它附件在海水中的净重量之和。
[0055]
进一步地,步骤(16)中,配置水下剖面浮标的重心位置包括:
[0056]
调整电池组件在水下剖面浮标中的位置后,对水下剖面浮标抽真空;将水下剖面浮标放入盛放海水的标定水槽中,将挂绳按照h所在位置兜绕水下剖面浮标并将水下剖面浮标吊起;通过上述操作反复调整电池组件的位置,直至水下剖面浮标在海水中呈稳定的水平悬浮平衡状态。
[0057]
进一步地,步骤(16)的具体操作包括:多次重复验证一和验证二,直至两者均满足条件;
[0058]
验证一:
[0059]
操作控制单元使油囊缩至体积最小,将水下剖面浮标放入盛放海水的标定水槽中,测量水下剖面浮标在海水中的重量在0.2-0.25kg,则代表配重合适;如果测量结果小于0.2kg,则增加小配重;如果测量结果大于0.25kg,则减少小配重;
[0060]
验证二:
[0061]
操作控制单元使油囊扩至体积最大,将水下剖面浮标放入盛放海水的标定水槽中,水下剖面浮标完全浸没在海水表面,且呈稳定保持水平的悬浮平衡状态,则代表配重合适;如果水下剖面浮标有露出海水表面的部分,则增加小配重;如果水下剖面浮标相对于海水表面下沉,则减少小配重
[0062]
本发明的有益效果是:
[0063]
本发明提供的一种极地拖曳式海洋剖面测量仪定标方法,能够确保每台水下剖面浮标具有最佳浮重力配比和最佳上浮姿态,从而实现水下剖面仪可靠上升到冰底和下沉到预定深度,保证其可以有效获取完整剖面测量数据。同时,本发明采用的力平衡体积测定法,对较大型的和外形不规则的浮标体积测定提供了简便快速的解决方案,能够更好地满足海洋工程中实际工作的需要。
附图说明
[0064]
图1为极地拖曳式海洋剖面测量仪的使用状态示意图;
[0065]
图2为极地拖曳式海洋剖面测量仪中水下剖面浮标的结构示意图;
[0066]
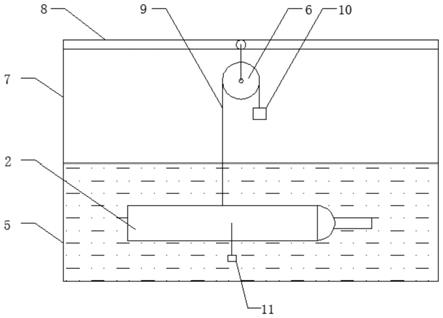
图3为水下剖面浮标在标定水槽中的状态示意图;
[0067]
图4为水下剖面浮标的在海水中的受力情况示意图。
[0068]
上述图中:1,冰基气象浮标;2,水下剖面浮标;3,拖曳电缆;4,海浮冰;
[0069]
20,测量传感器;21,传感器保护罩;22,控制单元23,电机;24,浮力舱筒;25,柱塞泵;26,油缸;27,电池组件;28,油囊保护罩;29,油囊;30,吊挂点;
[0070]
5-标定水槽;6-定滑轮;7-滑轮支架;8-滑轨;9-绳索;10-上拉砝码;11-下拉砝码。
具体实施方式
[0071]
为能进一步了解本发明的发明内容、特点及效果,以下将结合实施例与附图来详细说明。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互结合。
[0072]
如图1所示,极地拖曳式海洋剖面测量仪包括冰基气象浮标1和水下剖面浮标2,冰基气象浮标1和水下剖面浮标2由高强度的拖曳电缆3相连。冰基气象浮标1安放于海浮冰4上并随海浮冰4漂移,水下剖面浮标2在海水中定时做剖面运动,并在上升期间将剖面测量数据通过拖曳电缆3传输到冰基气象浮标1,冰基气象浮标1将数据处理后,采集的气象和水文数据汇同gps定位数据由铱星通信卫星传回地面用户。
[0073]
如图2所示,水下剖面浮标2为现有技术的成熟装置,包括测量传感器20、传感器保护罩21、控制单元22、电机23、浮力舱筒24、柱塞泵25、油缸26、电池组件27、油囊保护罩28、油囊29、吊挂点30。其中,吊挂点30为水下剖面浮标2与拖曳电缆3的连接点。
[0074]
正常情况下,油囊29处于收紧状态,液压油全部在油缸26内,水下剖面浮标2停留在水下120m深处等待时钟定时唤醒,此时水下剖面浮标2重力大于浮力。
[0075]
唤醒后电机23驱动单冲程柱塞泵25工作,将油缸26内液压油排入油囊29内,油囊29鼓涨使水下剖面浮标2浮力增大。当浮力大于其自身重量后水下剖面浮标2上升,同时进行水文和生态参数的剖面测量,每间隔固定深度进行一次采样,将测量数据通过拖曳电缆3发送给冰基气象浮标1。测量结束后,柱塞泵25活塞反向运动,将油囊29内的液压油逐渐抽回油缸26,使得油囊29体积减小,水下剖面浮标2浮力减小。当浮力小于其自身重量后水下剖面浮标2下沉,最大可下沉到120m拖曳电缆3的长度,进入休眠等待下一次唤醒,如此往复做剖面测量。
[0076]
由此可见,水下剖面浮标2在海水中做剖面测量的原理是在其重量恒定的情况下通过改变浮力来实现的。浮力变化的大小取决于油囊29的体积变化量,即柱塞泵25的排量。如果柱塞泵25的排量设计过小,不能提供足够的浮力,浮标就不可能完成剖面运动;如果柱塞泵25的排量设计过大,将引起重量体积加大,不利于水下剖面浮标2整体结构布局,加大电力消耗,减少工作寿命等问题。
[0077]
本发明能够在柱塞泵25排量设计一定的情况下,精确调节水下剖面浮标2的配重,使其可靠、稳定上升到冰底和下沉到120m的预定深度。
[0078]
具体地,本实施例提供了一种极地拖曳式海洋剖面测量仪定标方法,包括如下步骤:
[0079]
步骤1.测定油囊29缩至体积最小时水下剖面浮标2的体积及浮心距离
[0080]
(1)水下剖面浮标2组装完成后,操作控制单元22将液压油全部吸入油缸26内,使油囊29缩至体积最小,并将水下剖面浮标2的浮力舱筒24内部利用真空泵抽成真空。
[0081]
(2)将水下剖面浮标2放置在电子秤上精确称重,记录其在空气中的称重值fg。
[0082]
(3)将挂绳兜绕水下剖面浮标2并将水下剖面浮标2吊起,通过调节挂绳在水下剖面浮标2的位置,使水下剖面浮标2在水平方向上平衡,平衡后记录挂绳所在位置a与原点之间的距离,即为水下剖面浮标2的预测重心距离hg(水下剖面浮标2预测重心与原点之间距离)。
[0083]
其中,将水下剖面浮标2吊挂点30设为原点。
[0084]
(4)如图3所示,准备盛有淡水的标定水槽5,标定水槽5上方架设有滑轮支架7,滑轮支架7固定有滑轨8,滑轨8上安装有定滑轮6,定滑轮6能够沿滑轨8直线移动。
[0085]
将水下剖面浮标2放入标定水槽5中,观察水下剖面浮标2在水中的状态:
[0086]
如果水下剖面浮标2下沉,则将绳索9一端与水下剖面浮标2上部连接,另一端绕过定滑轮6后与上拉砝码10连接。通过调整上拉砝码10的重量和绳索9在水下剖面浮标2的位置,使水下剖面浮标2在水中呈水平的悬浮平衡状态并且稳定保持该状态,代表水下剖面浮标2所受浮力与重力相平衡;记录第一上拉砝码重量f
上1
以及第一上拉砝码距离标量h
上1
,其中第一上拉砝码距离标量h
上1
为上拉砝码10的吊点与原点之间的水平距离h
上1
。
[0087]
如果水下剖面浮标2上浮,则绳索9一端与水下剖面浮标2下部连接,另一端与下拉砝码11连接。通过调整下拉砝码11的重量和绳索9在水下剖面浮标2的位置,使水下剖面浮标2在水中呈水平的悬浮平衡状态并且稳定保持该状态,代表水下剖面浮标2所受浮力与重力相平衡;记录第一下拉砝码重量f
下1
以及第一下拉砝码距离标量h
下1
,其中第一下拉砝码距离标量h
下1
为下拉砝码11的吊点与原点之间的水平距离。
[0088]
如果水下剖面浮标2既不下沉也不上浮,刚好在水中呈水平的悬浮平衡状态并且稳定保持该状态,无需上拉砝码10或下拉砝码11调整,则f
上1
和f
下1
记为0。
[0089]
根据阿基米德定律,水下剖面浮标2浮力和其受到的外力相等。
[0090]
ρ
水
*v1=(f
水
f
下1-f
上1
)(1)
[0091]
式中,ρ
水
为淡水的密度;v1为油囊29缩至最小时水下剖面浮标2的体积,f
水
为水下剖面浮标2在水中的重量。
[0092]
将水下剖面浮标2及其内部的全部部件当作一整体计重量,水下剖面浮标2受到的空气浮力会影响其受到重力的测量。空气浮力的影响,可根据当地的空气密度与水下剖面浮标2的体积计算得到,水下剖面浮标2在水中的重量f
水
与水下剖面浮标2在空气中的重量fg和空气浮力f
空
的关系为满足下式:
[0093]f水
=fg f
空
(2)
[0094]
在标准大气压下,水下剖面浮标2在空气的浮力f
空
为标准值,一般为40g。
[0095]
式(2)代入式(1),得:
[0096]
ρ
水
*v1=(fg f
空
f
下1-f
上1
)(3)
[0097][0098]
式(4)中:v
1-油囊29缩至体积最小时水下剖面浮标2的体积;f
下1-第一下拉砝码重量;f
上1-第一上拉砝码重量;f
g-水下剖面浮标2在空气中的称重值;f
空-水下剖面浮标2在空气的浮力;ρ
水-淡水的密度。
[0099]
淡水4℃时密度为1kg/l,因此油囊29缩至体积最小时水下剖面浮标2的体积v1为:
[0100]
v1=(fg f
空
f
下1-f
上1
)(5)
[0101]
因此,由(5)可计算出油囊29缩至体积最小时水下剖面浮标2的体积v1。
[0102]
而水下剖面浮标2在水中平衡时,力矩也应当平衡,则:
[0103]f水
hg f
下1h下1-f
上1h上1
=f
浮h浮
(6)
[0104]
式(6)中:f
下1-第一下拉砝码重量;f
上1-第一上拉砝码重量;h
下1-第一下拉砝码距离标量;h
上1-第一上拉砝码距离标量;f
浮-油囊29缩至体积最小时水下剖面浮标2浮力;h
浮-油囊29缩至体积最小时水下剖面浮标2的浮心距离;f
水-水下剖面浮标2在水中的重量;h
g-水下剖面浮标2的预测重心距离。
[0105]
根据阿基米徳定律和式(6),f
浮
=v1;即可计算得油囊29缩至体积最小时水下剖面浮标2的浮心距离h
浮
,即油囊29缩至体积最小时水下剖面浮标2的浮心与原点之间的距离:
[0106][0107]
2.计算水下剖面浮标2中油囊29的体积变化量和油囊29在海水中的最大浮力
[0108]
(1)操作控制单元22将液压油全部排入油囊29内,使水下剖面浮标2的油囊29扩至体积最大。
[0109]
(2)同样用步骤1中(4)的方法记录第二上拉砝码重量f
上2
和第二下拉砝码重量f
下2
,测得油囊29扩至体积最大时水下剖面浮标2的体积v2。
[0110][0111]
式(4)中:v
2-油囊29扩至体积最大时水下剖面浮标2的体积;f
下2-第二下拉砝码重量;f
上2-第二上拉砝码重量;f
g-水下剖面浮标2在空气中的称重值;f
空-水下剖面浮标2在空气的浮力;ρ
水-淡水的密度。
[0112]
由于淡水4℃时密度为1kg/l,根据阿基米徳定律,油囊29扩至体积最大时水下剖面浮标2的体积v2为:
[0113]
v2=(fg f
空
f
下2-f
上2
)(9)
[0114]
(3)计算油囊29缩至体积最小时和扩至体积最大时之间的体积变化量:
[0115]
δv=v
2-v1(10)
[0116]
(4)计算油囊29在海水中的最大浮力:
[0117]f油
=δv*ρ
海水
(11)
[0118]
ρ
海水
取1.026kg/l,δv单位为l。
[0119]
3.计算油囊29缩至体积最小时水下剖面浮标2在海水中的浮力
[0120]
计算油囊29缩至体积最小时水下剖面浮标2在海水中的浮力f
浮收
:
[0121]f浮收
=ρ
海水
*v1(12)
[0122]
4.计算拖缆系统在海水中的净重力f
t
[0123]
拖曳电缆3、拉头、夹板等部件构成水下剖面浮标2拖曳系统,拖曳电缆3全长是125m,假设拖曳电缆3一半的作用力在水下剖面浮标2上。将没有固定在水下剖面浮标2的部件都看成是外力,而不计入水下剖面浮标2的质量,则外力等于这些部件受到的重力和浮力之差。油囊29的浮力另算,液压油的初始状态位于水下剖面浮标2的油缸内,质量算在水下剖面浮标2中,不另算液压油的重力。
[0124]
因此,设拖曳系统在海水中的净重力为f
t
,其值等于1/2长度的压缩后拖曳电缆3在海水中的净重量与其它附件在海水中的净重量之和。其中,其它附件是指拖曳系统中除拖曳电缆之外的部件。
[0125]
其计算方法具体如下:假设物体在海水中净重力定义为其重力与海水浮力之差。拖曳电缆3的总长度是125m,1/2长度是62.5m,其重量是58g/m,体积是57ml/m,如海水密度是1.026g/ml,则未压缩拖曳电缆3在海水中的净浮力为1.026*57=58.482g/m;1/2长度的未压缩拖曳电缆3在海水中的净重力是-(58.482-58)*62.5=-30.125g。拖曳电缆3长期浸泡在海水中,受到海水的压力作用,会被压缩体积变小。将拖曳电缆3放入压力罐中按2mpa打压,保持压力72h,释放压力后取出,在密度1.026g/ml的海水中测得的净重量值即为1/2长度的拖曳电缆3压缩量在海水中净重量32.031g。除拖曳电缆3之外的其它附件,如拉头,夹板等在海水中的净重力为100.13g。则f
t
=-30.125 32.031 100.13=102.036g。
[0126]
5.计算水下剖面浮标2在海水中的重量
[0127]
在任意深度,水下剖面浮标2的受力情况如图4所示。
[0128]
设水下剖面浮标2在海水中的重量为fz。根据油囊29缩至体积最小时水下剖面浮标2在海水中的浮力f
浮收
,油囊29在海水中的最大浮力f
油
,拖曳系统在海水中的净重力f
t
,计算水下剖面浮标2在海水中的重量fz。
[0129]
在水下剖面浮标2上升或下降的受力分析时,假设所有的力都作用在水下剖面浮标2质心上。将油囊29在海水中的最大浮力f
油
减去拖曳系统在海水中的净重力f
t
之后对半分配,即在海水平衡时,fz满足:
[0130]fz
=f
浮收
0.5(f
油-f
t
)-g(13)
[0131]
g-水下剖面浮标2的配重点与投放点由重力加速度引起的重力差,为固定值,约0.105kg。
[0132]
其中,配重点指的水下剖面浮标2在实验室的地点,投放点指是水下剖面浮标2布放地点。
[0133]
6、计算水下剖面浮标2的海水重心距离,即水下剖面浮标2在海水中的重心与原点之间的距离:
[0134]
水下剖面浮标2在海水中平衡时,力矩也应当平衡,则:
[0135]fz
h=f
浮收h浮
0.5(f
油h油-f
tht
)(14)
[0136]
由于拖曳电缆3挂在吊挂点30(原点)上,力臂长h
t
=0,对力矩平衡没有贡献。考虑公式(14),上升和下降时各分担一半油囊29产生的浮力矩。对(14)求解得到
[0137]
[0138]
其中,h-水下剖面浮标2的海水重心距离;f
z-水下剖面浮标2在海水中的重量;f
浮收-油囊29缩至体积最小时水下剖面浮标2在海水中的浮力;h
浮-油囊29缩至体积最小时水下剖面浮标2的浮心距离;f
油-油囊29在海水中的最大浮力;h
油-油囊29中心与原点距离,为固定值,14cm。
[0139]
7、根据水下剖面浮标2海水重心距离h,配置水下剖面浮标2的重心位置。
[0140]
调整电池组件27在水下剖面浮标2中的位置后,使用真空泵通过单向阀对水下剖面浮标2的浮力舱筒24抽真空。将水下剖面浮标2放入盛放海水的标定水槽中,将挂绳按照h所在位置兜绕水下剖面浮标2并将水下剖面浮标2吊起。其中,挂绳按照h所在位置兜绕水下剖面浮标是指,挂绳与原点之间的距离等于水下剖面浮标2的海水中重心距离h。
[0141]
通过上述操作反复调整电池组件27的位置,直至水下剖面浮标2在海水中呈稳定的水平悬浮平衡状态,则水下剖面浮标2的重心位置配置完成。
[0142]
9、验证与精调配置结果
[0143]
多次重复验证一和验证二,直至两者均满足条件。
[0144]
验证一:
[0145]
操作控制单元22将液压油全部吸入油缸内,使油囊29缩至体积最小。采用步骤1中(4)的标定水槽5测量水下剖面浮标2在海水中的重量。具体为:
[0146]
将水下剖面浮标2放入盛放海水的标定水槽5中,将绳索9一端与水下剖面浮标2上部连接,另一端绕过定滑轮6后与上拉砝码10连接。通过调整上拉砝码10的重量和绳索9在水下剖面浮标2的位置,使水下剖面浮标2在水中呈水平的悬浮平衡状态并且稳定保持该状态,代表水下剖面浮标2所受浮力与重力相平衡;此处上拉砝码10的重量即为水下剖面浮标2在海水中的重量。
[0147]
测量水下剖面浮标2在海水中的重量在0.2-0.25kg,则代表配重合适。
[0148]
如果测量结果小于0.2kg,则代表配重偏轻,需适当增加水下剖面浮标2内部的小配重。
[0149]
如果测量结果大于0.25kg,则代表配重偏重,需适当减少水下剖面浮标2内部的小配重。
[0150]
验证二:
[0151]
操作控制单元22将液压油全部排入油囊29内,使水下剖面浮标2的油囊29扩至体积最大,将水下剖面浮标2放入盛放海水的标定水槽5中。
[0152]
水下剖面浮标2完全浸没在海水表面,且呈稳定保持水平的悬浮平衡状态,则代表配重合适。
[0153]
如果水下剖面浮标2有露出海水表面的部分,则代表配重偏轻,需适当增加水下剖面浮标2内部的小配重。
[0154]
如果水下剖面浮标2相对于海水表面下沉,则代表配重偏重,需适当减少水下剖面浮标2内部的小配重。
[0155]
其中,小配重为预先放置在水下剖面浮标2内部的配重铅皮,增加或减少配重铅皮的数量可以达到增加或减少水下剖面浮标2内部小配重的目的。
[0156]
下面利用本发明的方法对2021年1#极地拖曳式海洋剖面测量仪的水下剖面浮标2进行定标:
[0157]
(1)水下剖面浮标2组装完成后,操作控制单元22使油囊29缩至体积最小,并将水下剖面浮标2的浮力舱筒24内部利用真空泵抽成真空;
[0158]
(2)使用电子秤上精确称重水下剖面浮标2在空气中的称重值fg=33.934kg;
[0159]
(3)通过吊挂法测量水下剖面浮标2的预测重心距离hg=83.5cm;
[0160]
(4)将水下剖面浮标2放入盛有淡水的标定水槽5中,通过上拉砝码10使水下剖面浮标2在水中呈稳定的水平悬浮平衡状态,记录第一上拉砝码重量f
上1
=0.972kg,第一上拉砝码距离标量h
上1
=59.5cm;
[0161]
(5)通过式(5)计算得到油囊缩至体积最小时水下剖面浮标的体积v1:
[0162]
v1=33.934 0.04 0.0-0.972=33.002l
[0163]
(6)计算水下剖面浮标2在水中的重量f
水
=33.934 0.04=33.974kg;
[0164]
通过式(7)计算得到油囊缩至体积最小时水下剖面浮标的浮心距离h
浮
:
[0165][0166]
(7)将液压油全部排入油囊29内,使油囊29扩至体积最大;
[0167]
(8)将水下剖面浮标2放入盛有淡水的标定水槽5中,通过上拉砝码10使水下剖面浮标2在水中呈稳定的水平悬浮平衡状态,记录第二上拉砝码重量f
上2
;
[0168]
(9)通过式(9)计算得到油囊29扩至体积最大时水下剖面浮标2的体积v2:
[0169]
v2=(fg f
空
f
下-f
上
)=33.934 0.04 0-0.118=33.856l
[0170]
(10)通过式(10)计算得到油囊29缩至体积最小时和油囊29扩至体积最大时之间的体积变化量δv;
[0171]
(11)通过式(11)计算得到油囊在海水中的最大浮力为:
[0172]f油
=δv*ρ
海水
=(v
2-v1)*ρ
海水
=(33.856-33.002)*1.026=0.876kg;
[0173]
(12)通过式(12)计算得到油囊缩至体积最小时水下剖面浮标在海水中的浮力f
浮收
:
[0174]f浮收
=ρ
海水
*v1(12)
[0175]
式(11)中:f
浮收-油囊缩至体积最小时水下剖面浮标在海水中的浮力;ρ
海水-海水密度,取值1.026kg/l;v
1-油囊缩至体积最小时水下剖面浮标的体积;
[0176]
(13)计算得到拖缆系统在海水中的净重力f
t
=0.102kg;
[0177]
(14)通过式(13)计算得到水下剖面浮标在海水中的重量fz=34.142kg:
[0178]
(15)通过式(15)计算水下剖面浮标的海水重心距离h:
[0179][0180]
(16)根据水下剖面浮标的海水重心距离83.5cm,配置水下剖面浮标2的重心位置;
[0181]
(17)最后验证与精调配置结果。
[0182]
尽管上面结合附图对本发明的优选实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,并不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可以作出很多形式的具体变换,这些均属于本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
