技术特征:
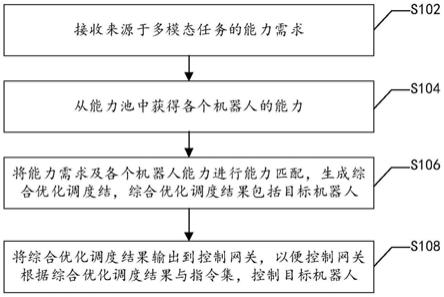
1.一种云端机器人调度控制方法,其特征在于,包括:接收来源于多模态任务的能力需求;从能力池中获得各个机器人的能力,其中,机器人的能力由智能机器人通过云端能力网关进行注册;将所述能力需求及所述各个机器人能力进行能力匹配,生成综合优化调度结果,所述综合优化调度结果包括目标机器人;将所述综合优化调度结果输出到控制网关,以便所述控制网关根据所述综合优化调度结果与指令集,完成对所述目标机器人的控制;其中,根据所述能力需求生成控制机器人的所述指令集。2.根据权利要求1所述的云端机器人调度控制方法,其特征在于,所述能力包括静态能力和动态能力;所述将所述能力需求及所述各个机器人能力进行能力匹配,生成综合优化调度结果包括:所述能力需求与所述各个机器人的静态能力进行静态能力匹配;获取满足静态能力匹配的机器人的动态能力指标,更新动态能力;将所述满足静态能力匹配的机器人的动态能力与所述能力需求进行动态能力匹配,生成综合优化调度结果。3.根据权利要求1所述的云端机器人调度控制方法,其特征在于,所述接收来源于多模态任务的能力需求包括:接收用户下发的多模态任务;对用户下发的多模态任务进行综合解析,生成完成任务所需要的功能集;根据所述功能集和能力规范库生成所述能力需求。4.根据权利要求2所述的云端机器人调度控制方法,其特征在于,还包括:接收机器人发送的功能集;根据功能集和所述能力规范库生成所述能力池。5.根据权利要求1所述的云端机器人调度控制方法,其特征在于,还包括:将能力测试和评估需求发送至所述控制网关,以便所述控制网关根据所述评估需求控制机器人完成能力测试生成的能力测试结果,并反馈至所述云端能力网关核对所述各个机器人的能力。6.根据权利要求4所述的云端机器人调度控制方法,其特征在于,还包括:设置静态匹配度参数;根据所述静态匹配度参数及所述能力需求确定所述满足静态能力匹配的机器人。7.根据权利要求1至6中任意一项所述的云端机器人调度控制方法,其特征在于,所述静态能力包括:语音能力或视觉能力或移动能力或抓握能力。8.根据权利要求1至6中任意一项所述的云端机器人调度控制方法,其特征在于,所述动态能力包括:实时位置或实时电量或实时任务状态。9.一种云端机器人调度控制装置,其特征在于,包括:需求接收模块,接收来源于任务的能力需求;能力获取模块,从能力池中获得各个机器人的能力,其中,机器人的能力由智能机器人
通过云端能力网关进行注册;能力匹配模块,将所述能力需求及所述各个机器人能力进行能力匹配,生成综合优化调度结果,所述综合优化调度结果包括目标机器人;机器人控制模块,将所述综合优化调度结果输出到控制网关,以便所述控制网关根据所述综合优化调度结果与指令集,完成对所述目标机器人的控制;其中,根据所述能力需求生成控制机器人的所述指令集。10.一种电子设备,其特征在于,包括:处理器;以及存储器,用于存储所述处理器的可执行指令;其中,所述处理器配置为经由执行所述可执行指令来执行权利要求1~8中任意一项所述云端机器人调度控制方法。11.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1~8中任意一项所述的云端机器人调度控制方法。
技术总结
本公开提供了一种云端机器人调度控制方法、装置、计算机可读存储介质及电子设备,涉及人工智能技术领域。该方法通过接收来源于多模态任务的能力需求;从能力池中获得各个机器人的能力,机器人的能力由智能机器人通过云端能力网关进行注册;将能力需求及各个机器人能力进行能力匹配,生成综合优化调度结果,综合优化调度结果包括目标机器人;将综合优化调度结果输出到控制网关,以便控制网关根据综合优化调度结果与指令集,完成对目标机器人的控制;根据能力需求生成控制机器人的指令集。本公开实施例能够根据能力需求综合优化调度目标机器人。器人。器人。
技术研发人员:李伟 杨明川
受保护的技术使用者:中国电信股份有限公司
技术研发日:2022.01.28
技术公布日:2022/5/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。