1.本发明涉及一种基于机器学习的摔倒识别方法及装置,属于动作识别技术领域。
背景技术:
2.随着人口老龄化的加剧,人们越来越关注老年人的生命安全。摔倒给老年人的生命安全带来了严重威胁,相关调查研究表明摔倒是造成老年人意外伤害的首要因素。老年人摔倒后如果没有人及时发现,往往会错过最佳救治时间,造成无法挽回的严重后果。因此对摔倒识别方法进行研究,有效识别出老年人异常摔倒具有重要的现实意义。摔倒识别本质上就是区分人体正常活动和摔倒行为。摔倒识别方法大致可以分为三类,基于阈值的方法,基于机器学习的方法以及基于阈值与机器学习相结合的方法,三种方法在摔倒识别中发挥着重要作用。
技术实现要素:
3.本发明的目的在于克服现有技术中的不足,提供一种基于机器学习的摔倒识别方法及装置,能够准确的对摔倒进行有效识别。
4.为达到上述目的,本发明是采用下述技术方案实现的:
5.第一方面,本发明提供了一种基于机器学习的摔倒识别方法,包括:
6.采集人体的动作数据,并对动作数据进行预处理生成待识别集;
7.基于预设的有效特征对待识别集进行特征提取生成待识别特征集;
8.将待识别特征集中样本输入预构建的摔倒识别模型中进行识别并获取识别结果;
9.其中,所述摔倒识别模型的构建过程为:
10.采集人体的动作数据,并对动作数据进行摔倒动作和人体正常活动动作的标注生成标注集;
11.对标注集中动作数据进行预处理生成数据集;
12.基于预设的有效特征对数据集进行特征提取生成样本集,并将样本集按照预设的比例随机划分为训练集和测试集;
13.将训练集和测试集输入预构建的相关向量机模型中并基于乌鸦算法进行训练优化模型参数;
14.将训练优化好的相关向量机模型作为摔倒识别模型。
15.可选的,所述人体摔倒动作包括向前摔倒、向后摔倒、向左摔倒和向右摔倒,所述人体正常活动动作包括行走、跑步、坐下和站起。
16.可选的,所述动作数据包括加速度、角速度以及姿态角的数据,所述加速度包括x轴加速度、y轴加速度和z轴加速度;所述角速度包括x轴角速度、y轴角速度和z轴角速度;所述姿态角包括x轴姿态角、y轴姿态角和z轴姿态角。
17.可选的,所述有效特征包括加速度的合加速度、角速度的合角速度以及加速度、角速度和姿态角的最大值、峰度、最小值、偏度、差值范围、方差、均值、均方根和标准差;
18.所述加速度的合加速度为:
[0019][0020]
所述角速度的合角速度为:
[0021][0022]
其中,acc为合加速度,accx、accy和accz分别为x轴加速度、y轴加速度和z轴加速度;gyro为合角速度,gyrox、gyroy和gyroz分别为x轴角速度、y轴角速度和z轴角速度。
[0023]
可选的,所述预构建的相关向量机模型为:
[0024][0025]
其中,k(x,xi)为核函数、wi为权值向量w中第i个权值,b是预设的偏置参数,i=1,2,3,
…
,n,n为输入相关向量机模型的样本数量,x为任一样本的有效特征数据,xi为第i个样本的有效特征数据。
[0026]
可选的,所述核函数为多项式核函数、拉普拉斯核函数或高斯核函数。
[0027]
可选的,所述基于乌鸦算法进行训练优化模型参数包括:
[0028]
初始化乌鸦算法的乌鸦种群数p、最大迭代次数iter
max
、飞行长度fl和感知概率ap,并确定乌鸦初始位置、藏食位置以及搜索空间上下界;
[0029]
获取乌鸦i在第iter次迭代后的目标位置
[0030][0031]
其中,为第iter次迭代时乌鸦i所处位置,为第iter次迭代时乌鸦j的藏食位置,ri和rj为(0,1)中均匀分布的随机数,为乌鸦i在第iter次迭代的飞行长度,为乌鸦j的在第iter次迭代的感知概率,i,j∈p;
[0032]
判断目标位置是否位于预设的搜索空间内,若否,则乌鸦i停留在位置
[0033]
若是,则乌鸦i从所处位置飞行至目标位置以乌鸦i所处位置和目标位置分别作为相关向量机模型中核函数的核参数;
[0034]
基于训练集和所述核参数计算相关向量机模型的权值wi,基于所述核参数和其对应的权值wi完善计算相关向量机模型;
[0035]
将测试集输入完善后的计算相关向量机模型,分别获取所处位置和目标位置的适应度,并基于适应度更新乌鸦i的藏食位置
[0036][0037]
其中,和分别为第iter次迭代时乌鸦i所处位置和目标位置的适应度,为第iter次迭代时乌鸦i的藏食位置;
[0038]
重复获取乌鸦i的目标位置,直至达到最大迭代次数iter
max
,输出的乌鸦所处位置为最优核参数,并基于训练集和最优核参数计算相关向量机模型的最终权值。
[0039]
可选的,所述所处位置和目标位置的适应度为:
[0040][0041][0042]
其中,right
iter
和right
iter 1
分别为相关向量机模型识别结果与实际结果相同的数量,m为测试集中样本的总数量。
[0043]
可选的,所述基于训练集和所述核参数计算相关向量机模型的权值wi包括:
[0044]
通过sigmoid函数将相关向量机模型转化为线性模型σ{y(xi)};
[0045]
计算线性模型σ{y(xi)}的似然估计概率分布p(t|w):
[0046][0047]
其中,t为目标值向量,t=(t1,t2,
…
ti…
,ti);xi为训练集中第i个样本的有效特征数据,i为训练集中样本的总数量;
[0048]
每个权值wi均有相对应的超参数αi且p(w|t,α)
∝
p(t|w)p(w|α),对于固定的超参数,最大可能权值w
mp
为:
[0049][0050]
其中,yi=σ{y(xi)},a=diag(α1,α2,
…
αi…
,αi);
[0051]
采用拉普拉斯方法对最大可能权值w
mp
进行两次求导:
[0052][0053]
其中,表示求导,φ为i
×
(i 1)阶矩阵,
[0054][0055][0056]
b=diag(β1,β2,
…
βi…
,βi)
[0057]
βi=σ{y(xi)}[1-{y(xi)}]
[0058]
令计算超参数更新值α
new
:
[0059]
∑=(φ
t
bφ a)-1
[0060]wmp
=∑φ
t
bt
[0061][0062]
其中,γi=1-αi∑
ii
,∑
ii
为∑的第i行i列元素;
[0063]
初始化超参数αi后,通过超参数更新进行迭代运算,迭代过程中,剔除趋向于无穷大的超参数αi,将剩余的超参数αi对应的权值wi保留作为权值解。
[0064]
第二方面,本发明提供了一种基于机器学习的摔倒识别装置,包括处理器及存储介质;
[0065]
所述存储介质用于存储指令;
[0066]
所述处理器用于根据所述指令进行操作以执行根据上述任一项所述方法的步骤。
[0067]
与现有技术相比,本发明所达到的有益效果:
[0068]
本发明提供的一种基于机器学习的摔倒识别方法及装置,通过对有效特征数据的提取,提高数据的契合度;同时在摔倒识别模型的构建过程中,通过乌鸦算法优化核参数,提升了模型识别的准确性,同时减少了计算时间提升检测的时效性。
附图说明
[0069]
图1是本发明实施例提供的一种基于机器学习的摔倒识别方法的流程图;
[0070]
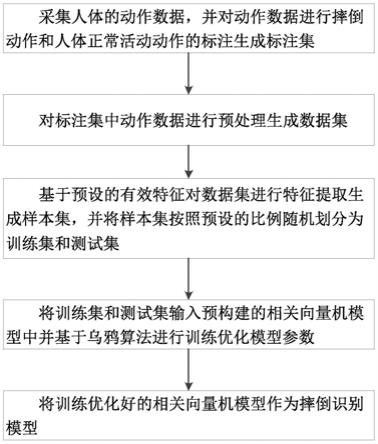
图2是本发明实施例提供的一种摔倒识别模型的构建过程流程图。
具体实施方式
[0071]
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
[0072]
实施例一:
[0073]
如图1所示,本发明实施例提供了一种基于机器学习的摔倒识别方法,包括以下步骤:
[0074]
1、采集人体的动作数据,并对动作数据进行预处理生成待识别集;
[0075]
1.1、人体摔倒动作包括向前摔倒、向后摔倒、向左摔倒和向右摔倒,人体正常活动动作包括行走、跑步、坐下和站起。
[0076]
1.2、动作数据包括加速度、角速度以及姿态角的数据,加速度包括x轴加速度、y轴加速度和z轴加速度;角速度包括x轴角速度、y轴角速度和z轴角速度;姿态角包括x轴姿态角、y轴姿态角和z轴姿态角。
[0077]
1.3、对动作数据进行预处理,可以是去除部分残缺或无效的数据。
[0078]
2、基于预设的有效特征对待识别集进行特征提取生成待识别特征集;
[0079]
在本实施例中,有效特征包括加速度的合加速度、角速度的合角速度以及加速度、角速度和姿态角的最大值、峰度、最小值、偏度、差值范围、方差、均值、均方根和标准差;
[0080]
加速度的合加速度为:
[0081][0082]
角速度的合角速度为:
[0083][0084]
其中,acc为合加速度,accx、accy和accz分别为x轴加速度、y轴加速度和z轴加速度;gyro为合角速度,gyrox、gyroy和gyroz分别为x轴角速度、y轴角速度和z轴角速度。
[0085]
3、将待识别特征集中样本输入预构建的摔倒识别模型中进行识别并获取识别结果。
[0086]
如图2所示,摔倒识别模型的构建过程为:
[0087]
(1)采集人体的动作数据,并对动作数据进行摔倒动作和人体正常活动动作的标注生成标注集;
[0088]
(2)对标注集中动作数据进行预处理生成数据集;
[0089]
(3)基于预设的有效特征对数据集进行特征提取生成样本集,并将样本集按照预设的比例随机划分为训练集和测试集;
[0090]
(4)将训练集和测试集输入预构建的相关向量机模型中并基于乌鸦算法进行训练优化模型参数;
[0091]
(5)将训练优化好的相关向量机模型作为摔倒识别模型。
[0092]
在本实施例中,预构建的相关向量机模型为:
[0093][0094]
其中,k(x,xi)为核函数、wi为权值向量w中第i个权值,b是预设的偏置参数,i=1,2,3,
…
,n,n为输入相关向量机模型的样本数量,x为任一样本的有效特征数据,xi为第i个样本的有效特征数据。
[0095]
核函数为多项式核函数、拉普拉斯核函数或高斯核函数,以高斯核函数为例,
[0096][0097]
其中,d为核参数。
[0098]
核函数k(x,xi)的核参数和权值wi直接影响相关向量机模型的识别精度。
[0099]
为了提升识别精度,基于乌鸦算法进行训练优化模型参数包括:
[0100]
初始化乌鸦算法的乌鸦种群数p、最大迭代次数iter
max
、飞行长度fl和感知概率ap,并确定乌鸦初始位置、藏食位置以及搜索空间上下界;
[0101]
获取乌鸦i在第iter次迭代后的目标位置
[0102][0103]
其中,为第iter次迭代时乌鸦i所处位置,为第iter次迭代时乌鸦j的藏食位置,ri和rj为(0,1)中均匀分布的随机数,为乌鸦i在第iter次迭代的飞行长
度,为乌鸦j的在第iter次迭代的感知概率,i,j∈p;
[0104]
判断目标位置是否位于预设的搜索空间内,若否,则乌鸦i停留在位置
[0105]
若是,则乌鸦i从所处位置飞行至目标位置以乌鸦i所处位置和目标位置分别作为相关向量机模型中核函数的核参数;
[0106]
基于训练集和核参数计算相关向量机模型的权值wi,基于核参数和其对应的权值wi完善计算相关向量机模型;
[0107]
将测试集输入完善后的计算相关向量机模型,分别获取所处位置和目标位置的适应度,并基于适应度更新乌鸦i的藏食位置
[0108]
所处位置和目标位置的适应度为:
[0109][0110][0111]
其中,right
iter
和right
iter 1
分别为相关向量机模型识别结果与实际结果相同的数量,m为测试集中样本的总数量;
[0112][0113]
其中,和分别为第iter次迭代时乌鸦i所处位置和目标位置的适应度,为第iter次迭代时乌鸦i的藏食位置;
[0114]
重复获取乌鸦i的目标位置,直至达到最大迭代次数iter
max
,输出的乌鸦所处位置为最优核参数,并基于训练集和最优核参数计算相关向量机模型的最终权值。
[0115]
具体的,基于训练集和核参数计算相关向量机模型的权值wi包括:
[0116]
通过sigmoid函数将相关向量机模型转化为线性模型σ{y(xi)};
[0117]
计算线性模型σ{y(xi)}的似然估计概率分布p(t|w):
[0118][0119]
其中,t为目标值向量,t=(t1,t2,
…
ti…
,ti);xi为训练集中第i个样本的有效特征数据,i为训练集中样本的总数量;
[0120]
每个权值wi均有相对应的超参数αi且p(w|t,α)
∝
p(t|w)p(w|α),对于固定的超参数,最大可能权值w
mp
为:
[0121][0122]
其中,yi=σ{y(xi)},a=diag(α1,α2,
…
αi…
,αi);
[0123]
采用拉普拉斯方法对最大可能权值w
mp
进行两次求导:
[0124][0125]
其中,表示求导,φ为i
×
(i 1)阶矩阵,
[0126][0127][0128]
b=diag(β1,β2,
…
βi…
,βi)
[0129]
βi=σ{y(xi)}[1-{y(xi)}]
[0130]
令计算超参数更新值α
new
:
[0131]
∑=(φ
t
bφ a)-1
[0132]wmp
=∑φ
t
bt
[0133][0134]
其中,γi=1-αi∑
ii
,∑
ii
为∑的第i行i列元素;
[0135]
初始化超参数αi后,通过超参数更新进行迭代运算,迭代过程中,剔除趋向于无穷大的超参数αi,将剩余的超参数αi对应的权值wi保留作为权值解。
[0136]
本实施例的摔倒模型评估:
[0137]
准确率(acc)、灵敏度(se)、特异性(sp)是摔倒识别中模型重要评估指标,准确率、灵敏度、特异性指标可以通过tp(真实摔倒样本预测为摔倒数量)、fp(真实正常样本预测为摔倒数量)、tn(真实摔倒样本预测为正常数量)、fn(真实正常样本预测为正常数量)样本预测结果计算得到。通过acc、se和sp值可以直接反映出摔倒识别效果。f1-score是摔倒识别中模型综合评估指标。通过灵敏度和特异性可以计算出f1-score:
[0138][0139]
通过综合指标f1-score能同时兼顾到评估模型的灵敏度和特异性。通过综合指标f1-score对本实施例提供的摔倒识别模型进行评估,可以获取本实施例提供的摔倒识别模型性能优异。
[0140]
实施例二:
[0141]
本发明实施例提供了一种基于机器学习的摔倒识别装置,包括处理器及存储介质;
[0142]
存储介质用于存储指令;
[0143]
处理器用于根据指令进行操作以执行根据如实施例一所述方法的步骤。
[0144]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实
施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0145]
本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0146]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0147]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0148]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。