1.本发明属于巷道变形和支护质量检测领域,具体涉及一种巷道变形和支护质量检测系统及方法。
背景技术:
2.巷道的变形情况和支护质量是衡量巷道稳固性的重要标准,对于预防井下巷道围岩突发性事故有着重要的参考价值,而如何有效方便的检测巷道变形情况和支护质量是防止巷道围岩突发性事故的关键。
3.传统巷道变形检测主要有以下几种:
4.1)采用钢尺、测杆等接触式测量;
5.2)巷道表面位移检测时多采用“十字布点法”进行人工测量及数据处理。
6.3)采用激光巷道断面扫描仪对巷道进行人工实地测量
7.传统巷道支护质量检测主要有以下几种:
8.1)通过人工观察锚杆是否松动进行检测;
9.2)采用现场拉拔试验对锚杆支护质量进行检测;
10.3)采用人工测锤激励的方法对锚杆的支护质量进行检测。
11.以上巷道变形检测和巷道支护质量检测存在以下缺点:
12.1.对于断面不规整、断面高度太大等巷道操作困难或无法进行准确检测;2.检测过程较繁琐且耗时、耗力,且不能开展大面积、随机性检测,灵活性较差;3.需要人工现场操作,存在一定的危险性,而且无法对巷道进行快速检测,对于信息化高度发达的今天,无法顺应时代的发展要求。
技术实现要素:
13.本发明要解决的技术问题是:利用网络技术,以解决现有巷道变形及支护质量检测技术费时费力,难以实现巷道变形和支护质量快速检测的技术问题,具体方案如下:
14.一种巷道变形和支护质量检测系统,包括巷道变形检测子系统和支护质量检测子系统,所述巷道变形检测子系统包括巷道变形检测装置,所述支护质量检测子系统包括锚杆受力检测装置,所述巷道变形检测装置和锚杆受力检测装置通过路由器和云服务端与主机网络连接。
15.进一步地,所述巷道变形检测装置包括机架,所述机架底端轴承连接有两个定向轮,所述两个定向轮连接轴传动连接有驱动电机,所述机架前端轴承连接有方向轮,机架内设置有蓄电池和与蓄电池电连接的开关电源,机架内还设置有第一无线wifi模块以及与开关电源电连接的激光巷道断面扫描仪、第一单片机控制器、第一转向电机、电动驱动伸缩杆、第二转向电机,所述第一单片机控制器分别与激光巷道断面扫描仪、第一无线wifi模块、第一转向电机、电动驱动伸缩杆、第二转向电机电连接,所述第一无线wifi模块通过路由器和云服务端将第一单片机控制器与主机网络连接,所述第一转向电机和电动驱动伸缩
杆螺栓连接,所述电驱动伸缩杆上设置有与开关电源和第一单片机控制器电连接的摄像头和与激光巷道断面扫描仪通讯连接的激光探头,所述第二转向电机与方向轮传动连接。
16.进一步地,所述第二转向电机的转轴上设置有第一皮带轮,所述方向轮的连接轴上设置有第二皮带轮,所述第一皮带轮和第二皮带轮通过第一皮带连接。
17.进一步地,所述驱动电机的转轴上设置有第三皮带轮,所述两个定向轮连接轴上设置有第四皮带轮,所述第三皮带轮和第四皮带轮通过第二皮带连接。
18.进一步地,所述机架上盖合有盖体,所述盖体包括第一盖体和第二盖体,所述第一盖体上设置有插孔,所述第二盖体上设置有插板,所述插板能插入插孔使得第一盖体和第二盖体耦合连接,所述第一盖体上设置有用于穿过电动驱动伸缩杆的孔洞。
19.进一步地,所述第一盖体和第二盖体的边缘部设置有与机架耦合连接的凸块。
20.进一步地,所述锚杆受力检测装置包括第一保护罩和与第一保护罩螺纹连接的第二保护罩,还包括第二单片机控制器和与第二单片机控制器通讯连接的第二无线wifi模块,所述第二无线wifi模块通过路由器和云服务端将第二单片机控制器与主机网络连接,所述第一保护罩上设置有两串线孔,第一保护罩内部设置有圆筒和与圆筒固定连接的螺旋形铁圈,所述第二保护罩内固定连接有弹簧,所述弹簧上固定连接有振动传感器,所述振动传感器一端与锚杆端部贴合,所述振动传感器另一端与螺旋形铁圈之间设置有磁铁,所述第二单片机控制器与螺旋形铁圈的两端头导线连接,所述导线穿过所述串线孔,所述螺旋形铁圈不通电时一端与磁铁相吸,通电时与磁铁相斥分离将磁铁排斥撞击振动传感器,所述第二保护罩四周设置有与扭紧螺杆螺纹连接的四个螺孔,所述扭紧螺杆有四颗用于将锚杆受力检测装置固定在锚杆端部。
21.进一步地,所述锚杆受力检测装置中的第二单片机控制器能与一个或一个以上螺旋形铁圈电连接。
22.进一步地,所述路由器包括主路由器和副路由器,所述主路由器与一个或多个副路由器通讯连接,且所述主路由器和副路由器都能与第一无线wifi模块和/或第二无线wifi模块通讯连接。
23.具体地,本发明提供一种巷道变形和支护质量检测方法,包括以下步骤:
24.s101:搭建局域网,第一单片机控制器通第一无线wifi模块、路由器和云服务端与主机实现网络连接;第二单片机控制器通过第二无线wifi模块、路由器和云服务端与主机网络连接,并在巷道上设置主路由器和/或与主路由器通讯连接的一个或多个副路由器,并将第一无线wifi模块和第二无线wifi模块设置为与最近的路由器通讯连接模式。
25.s102:巷道变形检测,通过主机向第一单片机控制器发出行走指令,第一单片机控制器开启摄像头并将视频信号实时上传至主机,通过主机控制第一单片机控制器开启驱动电机驱动巷道变形检测装置前后移动、开启第二转向电机改变小车运行方向,当巷道变形检测装置行走到巷道需要检测位置时,主机通过第一单片机控制器控制第一转向电机左右转动、控制电动驱动伸缩杆上下伸缩,直到激光探头处于合适的扫描位置,主机通过第一单片机控制器开启激光巷道断面扫描仪,与激光巷道断面扫描仪通讯连接的激光探头对巷道断面进行扫描,并将扫描结果通过激光巷道断面扫描仪上传至第一单片机控制器,随后第一单片机控制器将扫描结果上传至主机进行分析。
26.s103:支护质量检测,通过扭紧螺杆将锚杆受力检测装置固定在锚杆端部,锚杆一
端与受力检测装置内的振动传感器贴合,通过主机向第二单片机控制器发出指令,第二单片机控制器向螺旋形铁圈通电,形成电流的磁效应,产生与磁铁同性相斥的磁场,磁铁与螺旋形铁圈相斥分离,撞击振动传感器,振动传感器将振动信号上传至第二单片机控制器,第二单片机控制器将振动信号上传至主机进行分析。
27.本发明的有益效果是:
28.1.通过巷道变形检测装置和锚杆受力检测装置通过路由器和云服务端与主机网络连接,实现通过主机控制巷道变形检测装置和锚杆受力检测装置远程控制,进而可快速检测巷道的变形情况和锚杆的支护情况,避免人工现场检测可能发生的不可控风险。
29.2.巷道变形检测中通过主机控制第一单片机控制器开启摄像头、开启驱动电机驱动巷道变形检测装置前后移动、开启第二转向电机改变小车运行方向,能够方便快捷操控巷道变形检测装置的移动,主机通过第一单片机控制器控制第一转向电机左右转动、控制电动驱动伸缩杆上下伸缩有助于与激光巷道断面扫描仪通讯连接的激光探头寻找到合适的扫描位置,还能在线实时对巷道的变形情况进行视频分析;
30.3.主机通过第一单片机控制器开启激光巷道断面扫描仪,与激光巷道断面扫描仪通讯连接的激光探头对巷道进行扫描,并将扫描结果通过激光巷道断面扫描仪上传至第一单片机控制器,随后第一单片机控制器将扫描结果上传至主机进行分析,实现无人现场检测,避免了巷道围岩突发性事故给检测人员带来的安全风险。
31.4.支护质量检测中,通过在锚杆的端部安装锚杆支护质量检测装置,运用单片机控制器定时地对螺旋形铁圈通电,利用电流的磁效应,在螺旋形铁圈与磁铁的吸附部位形成与磁铁该处磁性相同的磁场,推动磁铁撞击振动传感器,振动传感器将振动信号上传至第二单片机控制器,随后第二单片机控制器将振动信号上传给主机供操控主机的工作人员分析,可实现高效快捷地对巷道支护的锚杆支护情况进行检测,且可在巷道中围岩不稳定处进行大规模布置该锚杆支护质量检测装置,能够有效地检测该处围岩的稳定情况。
附图说明
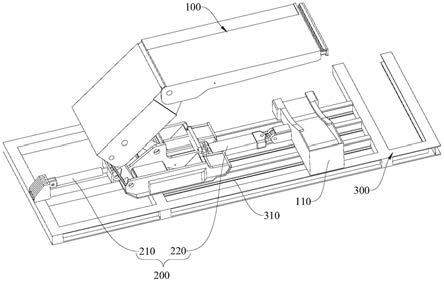
32.图1为巷道变形检测装置的整体结构示意图;
33.图2为巷道变形检测装置的内部结构示意图;
34.图3为巷道变形检测装置的爆炸结构示意图;
35.图4为巷道变形检测装置底部结构示意图;
36.图5为盖体的结构示意图;
37.图6为锚杆支护质量检测装置与锚杆的连接示意图;
38.图7为锚杆支护质量检测装置与锚杆连接处爆炸示意图;
39.图8为锚杆支护质量检测装置部分部件爆炸示意图;
40.图9为锚杆支护质量检测装置部分部件的剖面图;
41.图10为巷道变形检测装置和锚杆支护质量检测装置在巷道位置示意图;
42.图11为巷道变形和支护质量检测系统设备连接关系流程图;
43.图12为第一单片机控制器控制与动力设备连接示意图;
44.图13为主路由器与副路由器的连接示意图。
45.图中:10、巷道变形检测装置;11、机架;12、定向轮;13、方向轮;14、盖体;140、第一
盖体;141、第二盖体;142、插板;143、凸块;144、孔洞;145、插孔;15、蓄电池;16、激光巷道断面扫描仪;17、第一单片机控制器;
46.18、第一无线wifi模块;19、开关电源;101、第一转向电机;102、电动驱动伸缩杆;103、摄像头;104、激光探头;105、第二转向电机;106、第一皮带轮;107、第二皮带轮;108、第一皮带;109、驱动电机;110、第三皮带轮;111、第四皮带轮;112;第二皮带;20、锚杆受力检测装置;21、第一保护罩;22、串线孔;23、螺旋形铁圈;24、磁铁;25、振动传感器;26、弹簧;27、第二保护罩;28、扭紧螺杆;29、圆筒;290、第二单片机控制器;291、第二无线wifi
47.模块;30、锚杆;50、路由器;60、巷道。
具体实施方式
48.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
49.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
50.如图11、图12所示,本发明提供一种巷道变形和支护质量检测系统,包括巷道变形检测子系统和支护质量检测子系统,巷道变形检测子系统包括巷道变形检测装置10,支护质量检测子系统包括锚杆受力检测装置20,巷道变形检测装置10和锚杆受力检测装置20通过路由器50和云服务端与主机网络连接。
51.图1、图2、图3、图4、图10、图11、图12所示,巷道变形检测装置10包括机架11,机架11底端轴承连接有两个定向轮12,两个定向轮12连接轴传动连接有驱动电机109,机架11前端轴承连接有方向轮13,机架11内设置有蓄电池15和与蓄电池15电连接的开关电源19,机架11内还设置有第一无线wifi模块18以及与开关电源19电连接的激光巷道断面扫描仪16、第一单片机控制器17、第一转向电机101、电动驱动伸缩杆102、第二转向电机105,第一单片机控制器17分别与激光巷道断面扫描仪16、第一无线wifi模块18、第一转向电机101、电动驱动伸缩杆102、第二转向电机105电连接,第一无线wifi模块18通过路由器50和云服务端将第一单片机控制器17与主机网络连接,第一转向电机101和电动驱动伸缩杆102螺栓连接,电驱动伸缩杆102上设置有与开关电源19和第一单片机控制器17电连接的摄像头103和与激光巷道断面扫描仪16通讯连接的激光探头104,第二转向电机105与方向轮13传动连接。
52.如图3所示,第二转向电机105的转轴上设置有第一皮带轮106,方向轮13的连接轴上设置有第二皮带轮107,第一皮带轮106和第二皮带轮107通过第一皮带108连接。
53.如图4所示,驱动电机109的转轴上设置有第三皮带轮110,两个定向轮12连接轴上设置有第四皮带轮111,第三皮带轮110和第四皮带轮111通过第二皮带112连接。
54.如图5所示,机架11上盖合有盖体14,盖体14包括第一盖体140和第二盖体141,第一盖体140上设置有插孔145,第二盖体141上设置有插板142,插板142能插入插孔145使得第一盖体140和第二盖体141耦合连接,第一盖体140上设置有用于穿过电动驱动伸缩杆102的孔洞144。
55.第一盖体140和第二盖体141的边缘部设置有与机架11耦合连接的凸块143。
56.如图6、图7、图8、图9、图10、图11、图12所示,锚杆受力检测装置20包括第一保护罩21和与第一保护罩21螺纹连接的第二保护罩27,还包括第二单片机控制器290和与第二单片机控制器290通讯连接的第二无线wifi模块291,第二无线wifi模块291通过路由器50和云服务端将第二单片机控制器290与主机网络连接,第一保护罩21上设置有两串线孔22,第一保护罩21内部设置有圆筒29和与圆筒29固定连接的螺旋形铁圈23,第二保护罩27内固定连接有弹簧26,弹簧26上固定连接有振动传感器25,振动传感器25一端与锚杆30端部贴合,振动传感器25另一端与螺旋形铁圈23之间设置有磁铁24,第二单片机控制器290与螺旋形铁圈23的两端头导线连接,导线穿过串线孔22,螺旋形铁圈23不通电时一端与磁铁24相吸,通电时与磁铁24相斥分离将磁铁24排斥撞击振动传感器25,第二保护罩27四周设置有与扭紧螺杆28螺纹连接的四个螺孔,扭紧螺杆28有四颗用于将锚杆受力检测装置20固定在锚杆30端部。
57.如图6所示,锚杆受力检测装置20中的第二单片机控制器290能与一个或一个以上螺旋形铁圈23电连接。
58.如图13所示,路由器50包括主路由器和副路由器,主路由器与一个或多个副路由器通讯连接,且主路由器和副路由器都能与第一无线wifi模块18和/或第二无线wifi模块291通讯连接。
59.本发明的工作原理包括以下步骤:
60.s101:搭建局域网,第一单片机控制器通第一无线wifi模块、路由器和云服务端与主机实现网络连接;第二单片机控制器通过第二无线wifi模块、路由器和云服务端与主机网络连接,并在巷道上设置主路由器和/或与主路由器通讯连接的一个或多个副路由器,并将第一无线wifi模块和第二无线wifi模块设置为与最近的路由器通讯连接模式。
61.s102:巷道变形检测,通过主机向第一单片机控制器发出行走指令,第一单片机控制器开启摄像头并将视频信号实时上传至主机,通过主机控制第一单片机控制器开启驱动电机驱动巷道变形检测装置前后移动、开启第二转向电机改变小车运行方向,当巷道变形检测装置行走到巷道需要检测位置时,主机通过第一单片机控制器控制第一转向电机左右转动、控制电动驱动伸缩杆上下伸缩,直到激光探头处于合适的扫描位置,主机通过第一单片机控制器开启激光巷道断面扫描仪,与激光巷道断面扫描仪通讯连接的激光探头对巷道断面进行扫描,并将扫描结果通过激光巷道断面扫描仪上传至第一单片机控制器,随后第一单片机控制器将扫描结果上传至主机进行分析。
62.s103:支护质量检测,通过扭紧螺杆将锚杆受力检测装置固定在锚杆端部,锚杆一端与受力检测装置内的振动传感器贴合,通过主机向第二单片机控制器发出指令,第二单片机控制器向螺旋形铁圈通电,形成电流的磁效应,产生与磁铁同性相斥的磁场,磁铁与螺旋形铁圈相斥分离,撞击振动传感器,振动传感器将振动信号上传至第二单片机控制器,第二单片机控制器将振动信号上传至主机进行分析。
63.本发明中,通过巷道变形检测装置10和锚杆受力检测装置20通过路由器50和云服务端与主机网络连接,实现通过主机控制巷道变形检测装置10和锚杆受力检测装置20远程控制,进而可快速检测巷道的变形情况和锚杆30的支护情况,避免人工现场检测可能发生的不可控风险。
64.在巷道变形检测中通过主机控制第一单片机控制器17开启摄像头103、开启驱动电机109驱动巷道变形检测装置10前后移动、开启第二转向电机105改变小车运行方向,能够方便快捷操控巷道变形检测装置10的移动,主机通过第一单片机控制器17控制第一转向电机101左右转动、控制电动驱动伸缩杆102上下伸缩有助于与激光巷道断面扫描仪16通讯连接的激光探头104寻找到合适的扫描位置,还能在线实时对巷道的变形情况进行视频分析;
65.主机通过第一单片机控制器17开启激光巷道断面扫描仪16,与激光巷道断面扫描仪16通讯连接的激光探头104对巷道进行扫描,并将扫描结果通过激光巷道断面扫描仪16上传至第一单片机控制器17,随后第一单片机控制器17将扫描结果上传至主机进行分析,实现无人现场检测,避免了巷道围岩突发性事故给检测人员带来的安全风险。
66.在支护质量检测中,通过在锚杆30的端部安装锚杆支护质量检测装置20,运用第二单片机控制器290定时地对螺旋形铁圈23通电,利用电流的磁效应,在螺旋形铁圈20与磁铁24的吸附部位形成与磁铁24该处磁性相同的磁场,推动磁铁24撞击振动传感器25,振动传感器25将振动信号上传至第二单片机控制器290,随后第二单片机控制器290将振动信号上传给主机供操控主机的工作人员分析,可实现高效快捷地对巷道支护的锚杆30支护情况进行检测,且可在巷道中围岩不稳定处进行大规模布置该锚杆支护质量检测装置20,能够有效地检测该处围岩的稳定情况。
67.需要指出的是,本巷道变形和支护质量检测系统并不局限用于巷道变形和支护质量的检测,还可用于隧道或者类似于巷道和隧道的围岩硐室等结构。
68.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。