1.本技术涉及图像边缘侦测技术领域,具体涉及一种应用于图像降噪以及图像锐化的图像边缘侦测方法及图像边缘侦测装置。
背景技术:
2.现有的图像处理技术包括借由边缘侦测方法判断图像中的边缘是否具有方向,例如一种边缘侦测方法可根据边缘梯度判断边缘是否具有方向。然而,当边缘侦测方法遇到弱边缘或强纹理时,可能判断不准确,进而影响图像锐化和图像降噪等所需的边缘讯息,而导致边缘模糊或边缘噪声明显。
3.具体而言,传统的边缘侦测技术根据索伯(sobel)操作数(operator)计算图像不同方向的梯度,并且将梯度的幅度较大的区域认为有方向边缘。然而,当有方向纹理的梯度不够大,上述方法可能将纹理辨识为边缘而造成误判,或者,当有方向边缘较弱,上述方法也难以检测到有方向边缘。因此,现有技术有改进的必要。
技术实现要素:
4.有鉴于此,本发明的主要目的即在于提供一种图像边缘侦测方法及图像边缘侦测装置,以有效侦测图像中有方向的边缘。
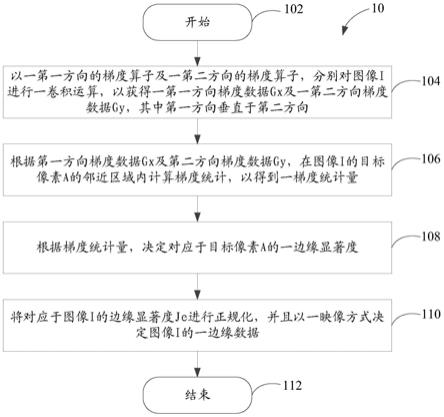
5.本发明实施例揭露一种图像边缘侦测方法,用于处理包括多个像素的一图像,该方法包括以一第一方向的梯度算子及一第二方向的梯度算子,分别对该图像进行一卷积运算,以获得一第一方向梯度数据及一第二方向梯度数据,其中该第一方向垂直于该第二方向;根据该第一方向梯度数据及该第二方向梯度数据,在该图像的一目标像素的一邻近区域内计算梯度统计,以得到一梯度统计量;以及根据该梯度统计量,决定对应于该目标像素的一边缘显著度。
6.本发明实施例另揭露一种图像边缘侦测装置,用于处理包括多个像素的一图像,其包括一卷积电路,包括一第一卷积电路单元以及一第二卷积电路单元,用于分别以一第一方向的梯度算子及一第二方向的梯度算子,分别对该图像进行一卷积运算,以获得一第一方向梯度数据及一第二方向梯度数据,其中该第一方向垂直于该第二方向;一统计电路,用于根据该第一方向梯度数据及该第二方向梯度数据,在该图像的一目标像素的一邻近区域内计算梯度统计,以得到一梯度统计量;以及一判断电路,用于根据该梯度统计量,决定对应于该目标像素的一边缘显著度。
附图说明
7.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
8.图1为本发明实施例的一图像边缘侦测方法的示意图。
9.图2为本发明实施例的一图像边缘侦测装置的示意图。
10.图3为本发明实施例的一映像函数的一映像曲线的示意图。
11.图4为本发明实施例的一应用场景的示意图。
12.图5为本发明另一实施例的图像边缘侦测装置的示意图。
具体实施方式
13.请同时参考图1及图2,图1为本发明实施例的一图像边缘侦测方法10的示意图,图2为本发明实施例的一图像边缘侦测装置20的示意图。图像边缘侦测装置20可用于执行图像边缘侦测方法10以处理包括多个像素的一图像i。图像边缘侦测装置20包括一卷积电路202、一乘积电路204、一统计电路206、一判断电路208及一处理电路210。
14.在步骤104中,图像边缘侦测方法10以一第一方向的梯度算子(operator)及一第二方向的梯度算子,分别对图像i进行一卷积运算,以获得一第一方向梯度数据gx及一第二方向梯度数据gy,其中第一方向垂直于第二方向。
15.具体而言,卷积电路202的第一卷积电路单元2022以及第二卷积电路单元2024可针对图像i的所有像素,分别以第一方向的梯度算子及第二方向的梯度算子进行卷积运算。在一实施例中,第一卷积电路单元2022可对图像i以x方向梯度算子kx进行卷积运算,以得到第一方向梯度数据gx,而第二卷积电路单元2024可对图像i以y方向梯度算子ky进行卷积运算,以得到第二方向梯度数据gy,并且上述x方向(即第一方向)与y方向(即第二方向)相互垂直。
16.举例来说,当目标像素a在图像i中的坐标为(i,j),图像边缘侦测装置20可根据图像边缘侦测方法10的步骤104得到目标像素a的第一方向梯度数据gx以及第二方向梯度数据gy,如下列式(1)-(4):
17.kx=[-1 0 1]...(1)
[0018]
ky=[-1 0 1]
t
...(2)
[0019][0020][0021]
其中,kx为x方向的梯度算子、ky为y方向的梯度算子,gx(i,j)代表目标像素a与x方向梯度算子kx进行卷积后的结果、gy(i,j)代表目标像素a与y方向梯度算子ky进行卷积后的结果。
[0022]
由于现有的图像边缘侦测技术在决定图像的边缘方向性时,仅采用单一像素的梯度讯息,无法有效地辨识图像中的纹理或弱边缘,进而影响辨识图像边缘的准确性。因此,本发明实施例的图像边缘侦测方法10进一步采用目标像素a的邻近区域的像素梯度讯息,以用于辨识图像边缘,其中邻近区域可包括目标像素a的至少一相邻像素。在一实施例中,邻近区域可以是相邻于目标像素a的5*5或7*7个像素单元的邻近像素。
[0023]
在步骤106中,图像边缘侦测方法10根据第一方向梯度数据gx及第二方向梯度数据gy,在图像i的目标像素a的邻近区域内计算梯度统计,以得到一梯度统计量。
[0024]
实施上,可先利用乘积电路204,根据对于目标像素a的第一方向梯度数据gx以及
第二方向梯度数据gy,计算第一方向梯度数据gx的平方gxx=gxgx、第二方向梯度数据gy的平方gyy=gygy以及第一方向梯度数据gx与第二方向梯度数据gy的乘积gxy=gxgy。
[0025]
接着,统计电路206可根据一加权系数、第一方向梯度数据gx的平方gxx、第二方向梯度数据gy的平方gyy以及第一方向梯度数据gx与第二方向梯度数据gy的乘积gxy,计算目标像素a邻近区域内的梯度统计量,其中加权系数可以是一高斯加权或一均值加权。
[0026]
当加权系数w为高斯加权系数时,可以如式(5)所示:
[0027][0028]
当加权系数w为均值系数时,可以如式(6)所示:
[0029]
w(m,n)=1...(6)
[0030]
其中,σ为一常态分布的标准偏差,m、n的值为目标像素a的邻近区域的范围。例如,当邻近区域为5*5像素单元时,则m、n分别为-2至2之间的整数(即-2、-1、0、1、2);当邻近区域为7*7像素单元时,则m、n分别为-3至3之间的整数(即-3、-2、-1、0、1、2、3)。
[0031]
因此,梯度统计量ixx(i,j)、iyy(i,j)、ixy(i,j)可以如式(7)、(8)、(9)所示:
[0032][0033][0034][0035]
值得注意的是,图像边缘侦测方法10的步骤104及步骤106仅描述针对单一目标像素a计算目标像素a的邻近像素的梯度统计量ixx(i,j)、iyy(i,j)、ixy(i,j)。实际上,本发明实施例的图像边缘侦测装置20根据图像边缘侦测方法10对图像i中的所有像素计算对应的梯度统计量ixx(i,j)、iyy(i,j)、ixy(i,j)。
[0036]
在此情形下,本发明实施例的图像边缘侦测方法10将目标像素a以及邻近于目标像素a的相邻区域的像素的梯度讯息作为决定图像的边缘方向性的判断依据,以提升图像边缘方向性判断的准确性。
[0037]
在步骤108中,图像边缘侦测方法10根据梯度统计量ixx(i,j)、iyy(i,j)、ixy(i,j),决定对应于目标像素a的一边缘显著度je。
[0038]
具体而言,边缘显著度je可根据梯度统计量ixx(i,j)、iyy(i,j)、ixy(i,j)的二阶统计量的一共变异数矩阵(covariance matrix)决定。例如,梯度统计量ixx(i,j)、iyy(i,j)、ixy(i,j)的一共变异数矩阵cxy可以如式(10)所示:
[0039][0040]
当共变异数矩阵cxy的一主方向的特征值(eigenvalue)λ1与一次方向的特征值λ2的一差距越大时,表示目标像素a的边缘显著度越大,其中主方向与次方向相互正交。由于梯度统计量ixx(i,j)、iyy(i,j)、ixy(i,j)是根据目标像素a以及其邻近区域的像素的梯度信息所获得,而当λ1>>λ2时,对应的邻近区域可能为边缘区域。
[0041]
在一实施例中,本发明实施例的图像边缘侦测方法10即可将边缘显著度je设置
为:
[0042][0043]
当λ1与λ2的差异越大时,则边缘显著度越大;当λ1与λ2相同时,则边缘显著度je=2。除此之外,式(11)也可推导成为等效式(12):
[0044][0045]
实施上,可借由判断电路208来判断边缘显著度je,判断电路208可利用式(11)或式(12)计算边缘显著度je。
[0046]
在步骤110中,图像边缘侦测方法10将对应于图像i的边缘显著度je进行正规化,并且以一映像方式决定图像i的一边缘数据。
[0047]
由于边缘显著度je的范围为[2,∞),因此在实际使用时需要正规化至0至1之间,并进行适当的映像,以符合应用场景的需求。本发明实施例的图像边缘侦测方法10将对应于图像的边缘显著度je进行正规化(normalized),并且以一映像方式决定图像的一边缘数据jec,其可表示为:
[0048]
jec=f(je)...(13)
[0049]
在一实施例中,图像边缘侦测方法10可透过一映像函数f(
·
)将边缘显著度je调整到适当的值,上述映像方式可以是一简单线性映像、一查找表映像、一指数映像或一对数映射等。
[0050]
当映像方式为简单线性映像时,边缘数据jec可表示为:
[0051]
jec=min(max(a(je-b),0),1)...(14)
[0052]
当映像方式为查找表映像时,则可根据图3所示的曲线所对应的一查找表来进行,并且将边缘显著度je截位(clip)至一定范围后再进行查找表映像,在此情形下,边缘数据jec可表示为:
[0053]
jec=lut(min(max(je,a),b))...(15)
[0054]
实施上,可利用处理电路210来对边缘显著度je进行正规化及映像处理。在一实施例中,处理电路210系包括一查表电路,查表电路借由查找预先储存于内存的查找表来完成映像处理。
[0055]
值得注意的是,本发明实施例图像边缘侦测方法10可因应不同应用场景选择不同的映像方式调整边缘显著度je。举例来说,当图像i的感亮度(iso值)为一低感亮度时(例如iso 100),处理电路210的查表电路借由查找一第一查找表来进行映像处理,而当图像i的感亮度(iso值)为一高感亮度时(例如iso 3200),处理电路210的查表电路借由查找一第二查找表来进行映像处理,第一查找表与第二查找表系对应不同的映像曲线。
[0056]
请参考图4,图4为本发明实施例的一应用场景的示意图。依据本发明实施例的图像边缘侦测方法10所产生的图像i像素的边缘数据jec,可应用于对图像i的一锐化(sharpening)处理。
[0057]
锐化处理是用于提升图像的锐利度,一般来说,锐化处理是针对yuv图像的y信道(即亮度信道)进行处理。如图4所示,对图像i进行处理时系先将y通道分离出来。接着,对y通道进行细节提取,以产生一纹理层、一边缘层及一基础层,而依据本发明实施例的图像边
缘侦测方法10所产生的边缘显著度je可用于做为调整图像的边缘层的参数。实施上,系利用边缘显著度je经正规化及映像处理后所得到的边缘数据jec调整图像的边缘层。
[0058]
在一实施例中,边缘数据jec可与对应的边缘层相乘(如图4所示,即边缘数据jec为边缘层的一乘积系数)。在其它实施例中,边缘数据jec也可以加法、减法、或除法等逻辑运算方式来调整边缘层。最后,经由本发明实施例的边缘数据jec调整后的图像边缘层与基础层结合后得到锐化后的y通道,再与经由颜色处理的uv通道合并,以输出处理后的yuv图像。
[0059]
请参考图5,图5为本发明实施例的一图像边缘侦测装置50的示意图。图像边缘侦测装置50亦可用于实施图像边缘侦测方法10。图像边缘侦测装置50包括一卷积电路502、一乘积电路504、一统计电路506及一判断电路508,其中卷积电路502包括卷积电路单元5022、5024。
[0060]
如图5所示,图像i被输入至图像边缘侦测装置50,可经由卷积电路的卷积电路单元5022、5024分别对图像i进行卷积运算(例如,卷积电路单元5022以x方向梯度算子kx对图像i进行卷积运算,卷积电路单元5024以y方向梯度算子ky对图像i进行卷积运算),以得到第一方向梯度数据gx以及第二方向梯度数据gy。为了配合的乘积电路504的需求及/或减少计算量,卷积电路502可包括多个移位电路,以对卷积电路单元5022、5024的输出进行移位处理(例如,向右移位一位(bit))。
[0061]
接着,乘积电路504利用平方电路以及乘法电路,计算第一方向梯度数据gx的平方gxx、第二方向梯度数据gy的平方gyy以及第一方向梯度数据gx与第二方向梯度数据gy的乘积gxy,并且由移位电路以及截位电路clip[
·
]将其结果向右移两位,并截取-2048至2047位,以配合统计电路506的需求及/或减少计算量。
[0062]
进一步地,统计电路506包括加总电路∑(
·
)以及截位电路clip[
·
],以根据邻近于目标像素a的邻近区域的梯度数据,计算局部区域内的梯度统计量ixx(i,j)、iyy(i,j)、ixy(i,j)并进行截位处理。
[0063]
最后,判断电路508可以逻辑运算电路、移位电路、截位电路clip[
·
]及除法电路实现上述式(12),以得到对应的边缘显著度je。在一实施例中,图像边缘侦测装置50可进一步包括一处理电路(未绘示),用于对边缘显著度je进行正规化及映像处理,以符合应用场景的需求。
[0064]
值得注意的是,图5所标示的位数为用于说明图像边缘侦测装置50的各个电路之间的位关系,而非用于限定图像边缘侦测装置50的实施方式。此外,图像边缘侦测装置50中的硬件电路及其连接关系仅为实施图像边缘侦测方法10的一种电路实施方式,而不以此为限制。
[0065]
综上所述,本发明所提供的图像边缘侦测方法及图像边缘侦测装置,以邻近于目标像素的梯度统计讯息来判断图像的边缘,进而有效提升侦测图像中的有方向的边缘的精准度。
[0066]
以上所述仅为本发明的较佳实施例,凡依本发明申请专利范围所做的均等变化与修饰,皆应属本发明的涵盖范围。
[0067]
符号说明:
[0068]
10:图像边缘侦测方法;
[0069]
102-112:步骤;
[0070]
20,50:图像边缘侦测装置;
[0071]
202,502:卷积电路;
[0072]
2022:第一卷积电路单元;
[0073]
2024:第二卷积电路单元;
[0074]
204,504:乘积电路;
[0075]
206,506:统计电路;
[0076]
208,508:判断电路;
[0077]
210:处理电路;
[0078]
5022,5024:卷积电路单元;
[0079]
a:目标像素;
[0080]
cxy:共变异数矩阵;
[0081]
f(je):边缘显著度函式;
[0082]
gx:第一方向梯度数据;
[0083]
gy:第二方向梯度数据;
[0084]
gxx:第一方向梯度数据的平方;
[0085]
gyy:第二方向梯度数据的平方;
[0086]
gxy:第一方向梯度数据与第二方向梯度数据的乘积;
[0087]
i:图像;
[0088]
ixx(i,j)、iyy(i,j)、ixy(i,j):梯度统计量;
[0089]
je:边缘显著度;
[0090]
kx:x方向梯度算子;
[0091]
ky:y方向梯度算子;
[0092]
w:加权系数;
[0093]
λ1:主方向特征值;
[0094]
λ2:次方向特征值。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。