1.本实用新型涉及冷藏冷冻领域,特别是涉及一种冰箱。
背景技术:
2.通常,冰箱储物间室的温度场往往具有一定的温差,为了精确控制食物的温度,现有技术出现了可升降的搁物架,搁物架可自动或手动地被调节高度。然而,现有技术中搁物架为单个,不能充分的利用储物间室的空间,用户体验感不佳。
技术实现要素:
3.本实用新型的一个目的旨在克服现有技术中的至少一个缺陷,提供一种具有两个可升降搁物架的冰箱。
4.本实用新型一个进一步的目的是降低横跨在两个搁物架上以及位于第一搁物架边缘处的物品倾倒的风险,提升第一搁物架和第二搁物架升降时的安全性。。
5.本实用新型另一个进一步的目的是要第一搁物架和第二搁物架的调节更加可靠性。
6.本实用新型另一个更进一步的目的是第一搁物架和第二搁物架不仅升降顺畅,而且悬停稳定,以便在不同高度承载物品。
7.特别地,本实用新型提供了一种冰箱,包括:箱体,具有储物间室;
8.第一搁物架和第二搁物架,并排布置在储物间室内,且第一搁物架和第二搁物架配置成可分别沿竖直方向升降;测障装置,设置于第一搁物架的上表面,并位于第一搁物架靠近第二搁物架的边缘处,配置成在第一搁物架和第二搁物架的高度差小于预设距离阈值时检测第一搁物架的边缘处是否存在障碍物;
9.主控板,与测障装置电连接,配置成在测障装置检测到存在障碍物的情况下,禁止第一搁物架和第二搁物架升降。
10.可选地,该冰箱还包括:两套驱动机构,用于分别驱动第一搁物架和第二搁物架升降,每套驱动机构还包括升降电机;且主控板与两个升降电机分别电连接,主控板配置成在测障装置检测到存在障碍物的情况下,禁止两个升降电机启动。
11.可选地,每套驱动机构还包括:丝杠,沿竖直方向设置,与升降电机相连;导向杆,沿竖直方向设置;升降架,其包括连接件和用于支撑第一搁物架或第二搁物架的支撑件,连接件与导向杆滑动连接,并与丝杠的螺杆螺纹连接,支撑件固定于连接件,升降架配置成在丝杠驱动下连接件沿导向杆升降,以使得支撑件带动第一搁物架或第二搁物架升降。
12.可选地,测障装置为红外传感器;且测障装置配置成自后向前地发射红外光线,以利用红外光线检测第一搁物架的边缘处障碍物。
13.可选地,测障装置的发光部与第一搁物架的上表面之间的高度处于0至3cm范围内的任意数值。
14.可选地,预设距离阈值配置成0至3cm范围内的任意数值。
15.可选地,升降电机为步进电机。
16.可选地,该冰箱还包括:测距装置,与主控板电连接,配置成检测第一搁物架和第二搁物架的高度差,并将高度差值发送至主控板。
17.可选地,测距装置为霍尔传感器。
18.可选地,该冰箱还包括:语音提示装置,与主控板电连接,配置成在禁止第一搁物架和第二搁物架升降时进行语音提示。
19.本实用新型的冰箱中,第一搁物架和第二搁物架并排设置在储物间室内,并可上下升降,测障装置设置在第一搁物架上,并位于靠近第二搁物架的边缘处,以检测第一搁物架的边缘处是否存在障碍物,当测障装置检测到存在障碍物时,禁止第一搁物架和第二搁物架升降,当测障装置检测到未存在障碍物时,第一搁物架与第二搁物架可自由升降,不受约束,这样降低了横跨在两个搁物架上以及位于第一搁物架边缘处的物品倾倒的风险,提升了第一搁物架和第二搁物架升降时的安全性。
20.进一步地,本实用新型的冰箱,测障装置工作的前提条件是第一搁物架与第二搁物架小于预设距离阈值的情况下进行,而预设距离阈值可设置成0至3cm范围内的任意数值,也就是说,测障装置工作的前提条件并非是第一搁物架和第二搁物架完全处于平齐状态,而是具有一定高度差的情况下进行,这样能够扩展测障装置检测的条件范围,使得第一搁物架和第二搁物架的调节更加可靠性,安全性更高。
21.进一步地,本实用新型的冰箱,升降电机的固定端可固定在箱体上,升降电机的输出轴可通过联轴器等与丝杠的一端连接,导向杆可沿竖向固定在箱体上,且位于丝杠的一侧,升降架的连接件一部分与导向杆滑动连接,另一部分与丝杆的螺杆螺纹连接,升降架的支撑件同时与第一搁物架的底面和升降架的连接件相固定。在升降过程中,升降电机启动,驱动丝杠转动,丝杠带动升降架的连接件升降,导向杆可起到导向和限制连接件轴向自由度的作用,连接件带动支撑件升降,支撑件可带动第一搁物架(或第二搁物架)升降,升降电机、丝杆、导向杆和升降架构成的驱动机构可使得第一搁物架(或第二搁物架)不仅升降顺畅,而且悬停稳定,以便在不同高度承载物品。
22.根据下文结合附图对本实用新型具体实施例的详细描述,本领域技术人员将会更加明了本实用新型的上述以及其他目的、优点和特征。
附图说明
23.后文将参照附图以示例性而非限制性的方式详细描述本实用新型的一些具体实施例。附图中相同的附图标记标示了相同或类似的部件或部分。本领域技术人员应该理解,这些附图未必是按比例绘制的。附图中:
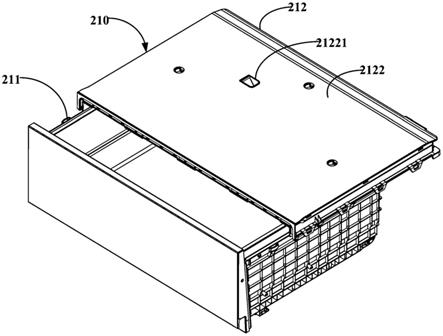
24.图1是根据本实用新型一个实施例的冰箱中第一搁物架、第二搁物架及其驱动机构的结构示意图;
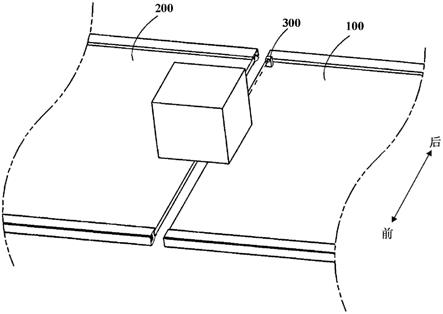
25.图2是根据本实用新型一个实施例的冰箱中第一搁物架、第二搁物架和测障装置的位置关系示意图;
26.图3是根据本实用新型一个实施例的冰箱的工作原理框图。
具体实施方式
27.在本实施例的描述中,需要理解的是,术语“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“进深”等指示的方位或置关系为基于冰箱正常使用状态下的方位作为参考,并参考附图所示的方位或位置关系可以确定,例如指示方位的“前”指的是朝向用户的一侧。这仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
28.本实用新型提供一种冰箱,该冰箱可包括箱体和门体,箱体可包括外壳和一个或多个内胆,外壳位于整体冰箱的最外侧,以保护整个冰箱。内胆与外壳之间的空间中填充有保温材料(形成发泡层),以降低内胆向外散热。每个内胆可以限定出向前敞开的储物间室,并且储物间室可以被配置成冷藏室、冷冻室、变温室等等,具体的储物间室的数量和功能可以根据预先的需求进行配置。
29.门体可以设置于箱体前侧,用于开闭储物间室,门体可以通过铰接的方式设置箱体前部的一侧,通过枢转的方式开闭储物间室,门体的数量可以与储物间室的数量匹配,从而可以将储物间室逐一单独开启。
30.该冰箱还可由循环制冷系统提供冷量,制冷系统可为由压缩机、冷凝器、节流装置和蒸发器等构成的制冷循环系统。
31.参见图1至图3,图1是根据本实用新型一个实施例的冰箱中第一搁物架100、第二搁物架200及其驱动机构的结构示意图,图2是根据本实用新型一个实施例的冰箱中第一搁物架100、第二搁物架200和测障装置300的位置关系示意图,图3是根据本实用新型一个实施例的冰箱的工作原理框图。在一些实施例中,该冰箱可包括第一搁物架100、第二搁物架200、测障装置300和主控板400,第一搁物架100和第二搁物架200并排布置在一个储物间室内,且第一搁物架100和第二搁物架200可分别受控地沿竖直方向升降。测障装置300设置于第一搁物架100的上表面,并位于第一搁物架100靠近第二搁物架200的边缘处,在第一搁物架100和第二搁物架200的高度差小于预设距离阈值时检测第一搁物架100的边缘处是否存在障碍物。主控板400与测障装置300电连接,配置成在测障装置300检测到存在障碍物的情况下,禁止第一搁物架100和第二搁物架200升降。
32.也即,本实施例的冰箱具有两个可升降的搁物架,即第一搁物架100和第二搁物架200,这样既充分利用储物间室的空间,又可实现精准控制温度。
33.第一搁物架100和第二搁物架200可任意设置储物间室的左侧或右侧,图1示出了第一搁物架100处于右侧,第二搁物架200处于左侧的情形,但可以理解的是,第一搁物架100和第二搁物架200的位置还可以互换,下文以图1所示的布置形式为例进行描述。
34.在本实施例中,第一搁物架100和第二搁物架200可操作地或自动地沿竖直方向升降。例如,用户可根据待储存的物品的尺寸通过遥控器、调节按钮等操作第一搁物架100和第二搁物架200升降;再例如,第一搁物架100和第二搁物架200还可通过语音控制、自动控制等方式升降,以精确控制物品的温度。
35.测障装置300位于第一搁物架100靠近第二搁物架200的边缘处,在第一搁物架100和第二搁物架200的高度差小于预设距离阈值时检测第一搁物架100的边缘处是否存在障碍物。测障装置300可将检测结果传输至主控板400,主控板400可根据该检测结果禁止或允
许第一搁物架100和第二搁物架200升降。
36.具体地,当第一搁物架100和第二搁物架200之间的高度差大于预设距离阈值时,第一搁物架100和第二搁物架200可自由升降,由于此时第一搁物架100和第二搁物架200之间已存在较大的高度差,因此可判定第一搁物架100和第二搁物架200之间已经不存在有障碍物,可允许两者自由升降。
37.当第一搁物架100和第二搁物架200之间的高度差小于预设距离阈值时,由于此时第一搁物架100与第二搁物架200之间的高度差较小,因此用户可能会将一些尺寸较大的物品横跨放置在第一搁物架100与第二搁物架200之间,这时一旦控制任一搁物架动作都会有物品倾倒的风险,尤其是对于长高状的容器、敞口的容器来说,容易造成液体流出,污染储物间室的环境。
38.此时,测障装置300开始检测第一搁物架100的边缘是否存在障碍物,若第一搁物架100的边缘存在障碍物,可判定为存在物品横跨在第一搁物架100与第二搁物架200之间或处于第一搁物架100的边缘,测障装置300可以将该检测结果发送至主控板400,主控板400可禁止第一搁物架100与第二搁物架200中任意一个升降,避免物品发生倾倒。若测障装置300未检测到障碍物,第一搁物架100与第二搁物架200可自由升降,不受约束。
39.在本实施例中,由于测障装置300设置在第一搁物架100,且检测第一搁物架100靠近第二搁物架200边缘是否存在障碍物,因此,测障装置300检测到存在障碍物可能包括两种情形:其一、障碍物横跨在第一搁物架100和第二搁物架200上;其二、障碍物处于第一搁物架100的边缘处,但未搭载于第二搁物架200。实用新型人意识到,对于情形二,尽管检测到的“障碍物”并非横跨在第一搁物架100和第二搁物架200,但是此时一旦允许第一搁物架100和第二搁物架200升降,物品可能在惯性、升降产生的摇晃的作用下也容易发生倾倒,因此在本实施例中,对于上述情形二,主控板400仍然禁止第一搁物架100和第二搁物架200升降,进一步降低了物品倾倒的风险,提升了第一搁物架100和第二搁物架200升降时的安全性。
40.参见图1和图3,进一步地,该冰箱还可包括两套驱动机构,两套驱动机构用于分别驱动第一搁物架100和第二搁物架200升降,每套驱动机构还可包括升降电机510,主控板400与两个升降电机510分别电连接,主控板400配置成在测障装置300检测到存在障碍物的情况下,禁止两个升降电机510启动。
41.具体地,该升降电机510还可设置保护电路,测障装置300将其检测结果发送至主控板400,主控板400根据检测结果向该保护电路发送指令,以实现在检测到存在障碍物的情况下,利用保护电路禁止两个升降电机510启动,在未检测到存在障碍物的情况下,允许两个升降电机510启动。
42.进一步地,该冰箱还可设置指示灯,以便实时向用户展示升降电机510的启动条件是否满足,例如指示灯为绿色时代表启动条件满足,指示灯为红色时代表启动条件未满足,需用户调整物品的位置。
43.参见图1,进一步地,每套驱动机构还可包括丝杠520、导向杆530和升降架540,丝杠520沿竖直方向设置,与升降电机510相连,导向杆530沿竖直方向设置,升降架540包括连接件542和用于支撑第一搁物架100或第二搁物架200的支撑件544,连接件542与导向杆530滑动连接,并与丝杠520的螺杆522螺纹连接,支撑件544固定于连接件542,丝杠520可驱动
下连接件542沿导向杆530升降,以使得支撑件544带动第一搁物架100或第二搁物架200升降。
44.升降电机510的固定端可固定在箱体上,升降电机510的输出轴可通过联轴器等与丝杠520的一端连接,导向杆530可沿竖向固定在箱体上,且位于丝杠520的一侧,升降架540的连接件542一部分与导向杆530滑动连接,另一部分与丝杆的螺杆522螺纹连接,升降架540的支撑件544大致呈三角状,其一边与第一搁物架100(或第二搁物架200)的底面相固定,另一边与升降架540的连接件542相固定。
45.在转动时,升降电机510启动,并驱动丝杠520转动,丝杠520带动升降架540的连接件542升降,导向杆530可起到导向和限制连接件542轴向自由度的作用,连接件542带动支撑件544升降,支撑件544可带动第一搁物架100(或第二搁物架200)升降。
46.进一步地,测障装置300为红外传感器,测障装置300可自后向前地发射红外光线,以利用红外光线检测第一搁物架100的边缘处是否存在障碍物。
47.也即,红外传感器可设置在第一搁物架100的后侧,这样既不用占用第一搁物架100前方空间,又可降低用户误碰测障装置300的概率,使得红外传感器的检测角度不会偏移设定角度。
48.进一步地,测障装置300的发光部与第一搁物架100的上表面之间的高度处于0至3cm范围内的任意数值,例如0、1cm或3cm等。通过上述限定使得测障装置300的发光部略高于第一搁物架100的上表面,这样测障装置300的发光部发出的光线避免与第一搁物架100的上表面产生干涉,降低误测概率。
49.在一些实施例中,预设距离阈值可设置成0至3cm范围内的任意数值,例如0、1cm或3cm等。
50.也即,在本实施例中,检测第一搁物架100是否存在障碍物的前提条件并非是第一搁物架100和第二搁物架200完全处于平齐状态。实用新型意识到,第一搁物架100和第二搁物架200处于平齐实际上是一种特殊状态,而用户在第一搁物架100和第二搁物架200的高度差不大的情况下也可能在两者之间横跨防止物品(此时物品可以处于平衡),因此仅在两者处于平齐状态时检测障碍物可靠性不高,因此,通过上述限定能够扩展检测的条件范围,使得第一搁物架100和第二搁物架200的调节可靠性更佳,安全性更高。
51.在一些实施例中,升降电机510为步进电机,步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机,在该冰箱出厂之前,冰箱的主控板400还可预先存储预设角位移,升降电机510在接受到主控板400的动作指令后,以预设角位移为单位进行转动。
52.参见图3,在一些实施例中,该冰箱还可包括测距装置600,测距装置600与主控板400电连接,测距装置600能够检测第一搁物架100和第二搁物架200的高度差,并将高度差值发送至主控板400。
53.在本实施例中,测距装置600可为霍尔传感器,且霍尔传感器的数量可以两个,两个霍尔传感器分别与两个升降电机510电连接,并用于检测两个升降电机510的步数,而由于驱动电机驱动丝杠520和丝杠520带动升降架540升降可视为线性关系,因此,在该冰箱出厂前可预先存储步进电机的步数与升降距离的关系,然后确定出每个搁物架的高度,进而确定出第一搁物架100和第二搁物架200之间的高度差。
54.当然,本领域技术人员在知晓本实施例的方案后还可以做相应的变形,依然可以
实现检测第一搁物架100和第二搁物架200之间的高度差,例如利用红外测距仪等装置,在此不一一列举。
55.参见图3,在一些实施例中,该冰箱还可包括语音提示装置700,该语音提示装置700可以扬声器,语音提示装置700可以与主控板400电连接,当主控板400禁止两个升降电机510启动时,向用户发出提示音或预先存储的提示语音,以便用户及时调整物品位置。
56.本实用新型的冰箱中,第一搁物架100和第二搁物架200并排设置在储物间室内,并可上下升降,测障装置300设置在第一搁物架100上,并位于靠近第二搁物架200的边缘处,以检测第一搁物架100的边缘处是否存在障碍物,当测障装置300检测到存在障碍物时,禁止第一搁物架100和第二搁物架200升降,当测障装置300检测到未存在障碍物时,第一搁物架100与第二搁物架200可自由升降,不受约束,这样降低了横跨在两个搁物架上以及位于第一搁物架100边缘处的物品倾倒的风险,提升了第一搁物架100和第二搁物架200升降时的安全性。
57.进一步地,本实用新型的冰箱,测障装置300工作的前提条件是第一搁物架100与第二搁物架200小于预设距离阈值的情况下进行,而预设距离阈值可设置成0至3cm范围内的任意数值,也就是说,测障装置300工作的前提条件并非是第一搁物架100和第二搁物架200完全处于平齐状态,而是具有一定高度差的情况下进行,这样能够扩展测障装置300检测的条件范围,使得第一搁物架100和第二搁物架200的调节更加可靠性,安全性更高。
58.进一步地,本实用新型的冰箱,升降电机510的固定端可固定在箱体上,升降电机510的输出轴可通过联轴器等与丝杠520的一端连接,导向杆530可沿竖向固定在箱体上,且位于丝杠520的一侧,升降架540的连接件542一部分与导向杆530滑动连接,另一部分与丝杆的螺杆522螺纹连接,升降架540的支撑件544同时与第一搁物架100的底面和升降架540的连接件542相固定。在升降过程中,升降电机510启动,驱动丝杠520转动,丝杠520带动升降架540的连接件542升降,导向杆530可起到导向和限制连接件542轴向自由度的作用,连接件542带动支撑件544升降,支撑件544可带动第一搁物架100(或第二搁物架200)升降,升降电机510、丝杆520、导向杆530和升降架540构成的驱动机构可使得第一搁物架100(或第二搁物架200)不仅升降顺畅,而且悬停稳定,以便在不同高度承载物品。
59.至此,本领域技术人员应认识到,虽然本文已详尽示出和描述了本实用新型的多个示例性实施例,但是,在不脱离本实用新型精神和范围的情况下,仍可根据本实用新型公开的内容直接确定或推导出符合本实用新型原理的许多其他变型或修改。因此,本实用新型的范围应被理解和认定为覆盖了所有这些其他变型或修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。