1.本发明涉及一种颗粒测量装置和颗粒测量方法。
背景技术:
2.以往,作为求出漂浮于试样中的颗粒的大小的一个方法,已知流动颗粒跟踪(fpt:flow particle tracking)法。通过使用fpt法,能通过向试样照射光并对从颗粒发出的散射光进行拍摄来观察颗粒的运动,并根据通过布朗运动而产生的移动量来测量颗粒的接近于几何尺寸的大小。此外,还能通过同时测量光散射强度来求出颗粒的折射率等,因此,fpt法对于半导体的生产工序中的污染颗粒的控制等而言特别有用。
3.作为使用fpt法的装置(fpt装置),已知一种在与试样的流动方向对置的位置配置有由透镜等构成的聚光光学系统的装置(例如,参照专利文献1。)。试样的流动方向换而言之是指颗粒通过试样的流动而被输送的方向。在该fpt装置中,聚光光学系统配置于与试样的流动方向对置的位置,因此,从聚光光学系统中观察不到通过试样的流动而产生的颗粒的移动,而只观察到通过布朗运动而产生的颗粒的移动。
4.现有技术文献
5.专利文献
6.专利文献1:日本专利第6549747号公报
技术实现要素:
7.发明所要解决的问题
8.再者,在fpt法中,根据通过布朗运动而产生的颗粒的移动量、试样的粘度和温度,通过斯托克斯-爱因斯坦公式来计算出颗粒的粒径,因此,准确地求出颗粒的移动量对于高精度地测量粒径而言很重要。此外,根据构成拍摄到的视频的各帧图像中捕捉到的颗粒的重心的位置来确定各帧之间的颗粒的重心的移动量,由此求出颗粒的移动量,因此,聚光光学系统的倍率的误差会导致颗粒的移动量的误差。
9.在fpt装置中,需要增加构成聚光光学系统的透镜的开口数并扩大视场角,这一点难以与高精度的远心光学系统兼顾。各帧图像因散焦而产生倍率的误差,颗粒根据试样的流动方向上的位置以不同的倍率被捕捉到图像中。此外,即使颗粒以平行于试样的流动方向的方式移动,由于因散焦位置而引起的倍率的变化,颗粒会以在与试样的流动方向垂直的面上从中心向外侧移动的方式被捕捉到图像中。因此,基于如此捕捉到的帧图像而求出的颗粒的移动量乃至根据颗粒的移动量等而计算出的粒径必然会因聚光光学系统的光学误差而受到影响,因此聚光光学系统的光学误差是对高精度地测量粒径而言亟需解决的问题。
10.因此,本发明的目的在于提供一种高精度地测量粒径的技术。
11.用于解决问题的方案
12.为了上述的问题,本发明采用以下的颗粒测量装置和颗粒测量方法。需要说明的
是,以下的括号中的文字仅为示例等,本发明不限于此。
13.即,本发明的颗粒测量装置和颗粒测量方法中,将照射光照射于流路,在使流路的规定区间向试样的流动方向虚拟延长后的位置,对从通过检测区域的试样中所含的颗粒发出的散射光进行聚光并以规定的帧率进行拍摄,其中,所述检测区域是利用照射光的照射而形成于所述规定区间内的区域。在此基础上,基于多个帧图像来计算出通过布朗运动而产生的颗粒的二维方向(与流动方向垂直的方向)的移动量。进而,使用校正值来对该移动量进行校正,并基于校正后的移动量来确定颗粒的粒径,其中,所述校正值是为了对散射光聚光时产生的倍率的误差进行校正而根据散焦位置预先求出的值。
14.在fpt装置中,当在使流路的规定区间向试样的流动方向虚拟延长后的位置(与试样的流动对置的位置)对从试样中所含的颗粒发出的散射光进行聚光并拍摄时,会在散射光聚光时产生因散焦而引起的倍率的误差,颗粒根据试样的流动方向上的位置以不同的倍率被捕捉到帧图像中。基于如此拍摄到的图像而计算出的通过布朗运动而产生的颗粒的移动量中包含了误差,因此,当基于计算出的移动量来确定颗粒的粒径时,移动量中包含的误差会波及到粒径,无法高精度地测量粒径。
15.与此相对,在本方案中,使用校正值来对计算出的移动量进行校正,并在此基础上基于校正后的移动量来确定颗粒的粒径,其中,所述校正值是为了对散射光聚光时产生的倍率的误差进行校正而根据散焦位置预先求出的值。因此,根据本方案,因散焦而产生的倍率的误差会被校正,因此,能更准确地求出颗粒的移动量,能高精度地测量粒径。
16.优选的是,在上述的颗粒测量装置和颗粒测量方法中,使用以速度单位表示的值来作为校正值。更具体而言,使用表示基于散焦位置和帧图像上的位置而预先计算出的每单位时间的移动量的误差的值来作为校正值。
17.在本方案中,用于计算出的移动量的校正的校正值被表示为速度单位即每单位时间的移动量的误差。因此,即使在改变拍摄的帧率来进行颗粒的测量的情况下,也能使用相同的算式来进行移动量的校正。
18.此外,优选的是,在上述任意的颗粒测量装置和颗粒测量方法中,使用将因散焦位置而产生的倍率的变化假定为试样的流动方向上的距离的一次函数而预先求出的值来作为校正值。
19.在本方案中,用于移动量的校正的校正值是以试样的流动方向上的距离的一次函数的形式预先求出因散焦位置而产生的倍率的变化而得到的值。因此,根据本方案,能与散焦位置无关地将因散焦而产生的固定的间隔内的误差校正为固定量。
20.发明效果
21.如上所述,根据本发明,能高精度地测量粒径。
附图说明
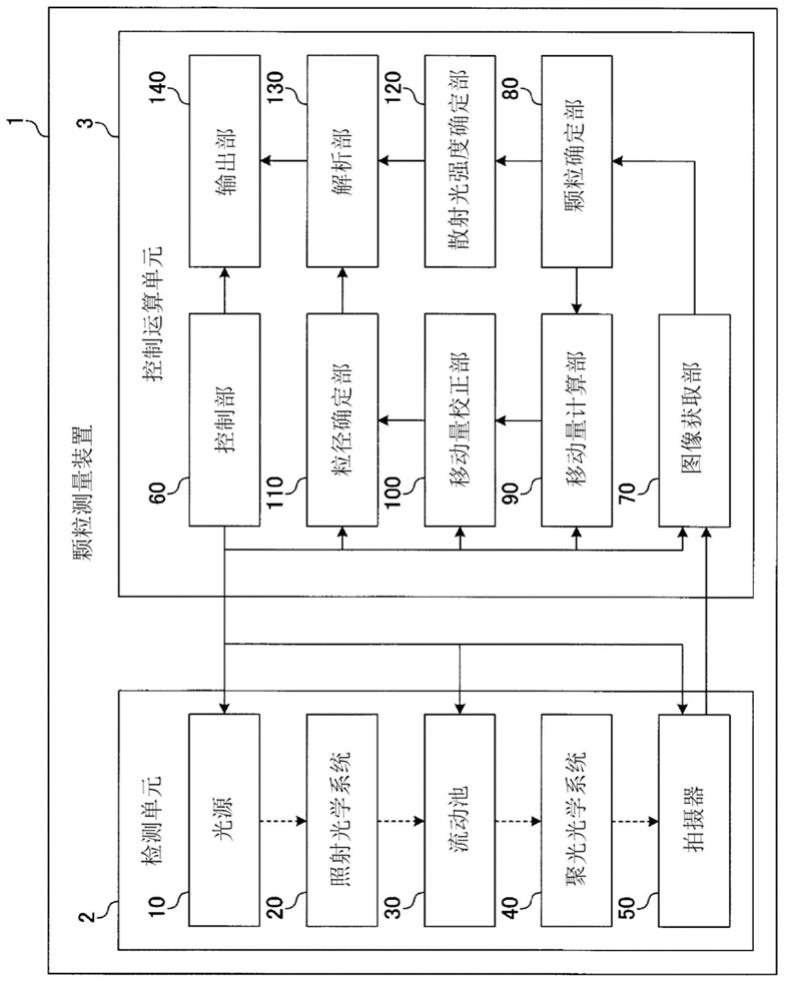
22.图1是表示一实施方式中的颗粒测量装置的结构的框图。
23.图2a是简要地表示一实施方式中的检测单元的结构的图。
24.图2b是简要地表示一实施方式中的检测单元的结构的图。
25.图3是简要地表示一实施方式中的检测单元的结构的垂直剖视图(沿着图2a的iii-iii剖切线的剖视图)。
26.图4是对检测区域内的颗粒的运动的样子进行说明的图。
27.图5是对图像传感器的受光面上的颗粒的运动的样子进行说明的图。
28.图6a是对因散焦而产生的粒径的误差进行说明的图。
29.图6b是对因散焦而产生的粒径的误差进行说明的图。
30.图7是表示倍率相对于散焦位置的校准曲线的图。
31.图8是表示受光面的像点的图。
32.图9a是表示用于校正x方向的移动量的校正映射图的一个例子的图。
33.图9b是表示用于校正x方向的移动量的校正映射图的一个例子的图。
34.图10a是表示用于校正z方向的移动量的校正映射图的一个例子的图。
35.图10b是表示用于校正z方向的移动量的校正映射图的一个例子的图。
具体实施方式
36.以下,参照附图对本发明的实施方式进行说明。需要说明的是,以下的实施方式为优选的示例,本发明不限于该示例。
37.〔颗粒测量装置的结构〕
38.图1是表示一实施方式中的颗粒测量装置1的结构的框图。
39.颗粒测量装置1是fpt装置,如图1所示,其基本结构包括检测单元2和控制运算单元3。其中,检测单元2是与将光照射于作为流体的试样来检测散射光相关的设备组,该散射光通过试样中漂浮的颗粒与照射光的相互作用而产生。此外,控制运算单元3是与构成检测单元2的各设备的控制和基于由检测单元2检测到的散射光来计算每个颗粒的移动量从而进行粒径的确定等相关的功能组。
40.〔检测单元的结构〕
41.首先,对检测单元2的结构进行说明。
42.检测单元2例如由光源10、照射光学系统20、流动池30、聚光光学系统40、拍摄器50等构成。光源10例如为半导体激光二极管,射出激光等照射光。照射光学系统20例如通过将扩束器、衍射光学元件以及光学狭缝等组合而构成,将光源10所射出照射光整形为规定的形状并聚光于流动池30的内部。
43.流动池30由石英、蓝宝石等透明材料构成,在其内部形成有供试样流入的流路。当照射光射入流动池30时,流路内会形成检测区域。聚光光学系统40(受光透镜系统)例如为非远心透镜的光学透镜结构,将从通过检测区域的颗粒发出的散射光聚光于拍摄器50。也就是说,“检测区域”是照射光与由聚光光学系统40聚光于拍摄器50上的范围交叉的区域。拍摄器50例如为具备电荷耦合元件(ccd:charge-coupled device)、互补金属氧化物半导体(cmos:complementary metal-oxide semiconductor)等图像传感器的照相机,对由聚光光学系统40聚光于图像传感器的受光面的散射光进行拍摄。
44.图2a和图2b是简要地表示一实施方式中的检测单元2的结构的图。
45.图2a是流动池30的立体图。流动池30呈l字状形状,在其内部形成有l字形的流路,该l字形流路通过使从第一开口31向y方向延伸的第一区间32与从第二开口33向z方向延伸的第二区间34在各端部处连通而成。试样从第一开口31流入至第一区间32,经过第二区间34从第二开口33向外部排出。需要说明的是,流动池30的形状只要是具有弯曲为l字状的部
位的形状即可,例如也可以采用u字形、曲柄形来代替l字形。
46.图2b是简要地表示检测单元2的结构尤其是各部件之间的位置关系的俯视图。照射光学系统20从与第一区间32中的试样的流动方向(y方向)垂直的方向(x方向)使整形后的照射光bi射入至流动池30。此外,聚光光学系统40和拍摄器50配置于与第一区间32中的试样的流动对置的位置,即配置于使第一区间32向试样的流动方向虚拟延长后的位置,将从通过检测区域m的颗粒发出的散射光bs聚光来进行拍摄。通过这些部件,观测每个颗粒在xz平面上的运动即布朗运动。需要说明的是,关于散射光bs的拍摄,在后文中利用其他附图来进一步阐述。
47.图3是简要地表示一实施方式中的检测单元2的结构的垂直剖视图(沿着图2a的iii-iii剖切线的剖视图)。需要说明的是,关于聚光光学系统40和拍摄器50,省略了剖面的图示。
48.如上所述,整形后的照射光bi从x方向射入至流动池30,在第一区间32形成检测区域m。检测区域m的形状例如是以长边为z方向并以短边为y方向并在x方向上具有与长边大致相等的深度的形状。
49.在位于检测区域m与聚光光学系统40之间的流动池30的内壁形成有凹面部35,该凹面部35呈凹状的形状,与检测区域m的中心的距离大致为该凹面部35的曲率半径。当从通过了检测区域m的颗粒p产生的散射光bs射入至流动池30的内壁时,由于试样的折射率与流动池30的折射率的差异,可能会产生光的折射,但通过凹面部35,能抑制射入至流动池30的内壁的散射光bs的折射。
50.聚光光学系统40和拍摄器50相对于流动池30的位置以聚光光学系统40的光轴为基准来确定,各部件分别配置于聚光光学系统40的光轴穿过检测区域m的中心、凹面部35的中心、拍摄器50所具备的图像传感器的受光面的中心的位置。拍摄器50与xz平面对置,对检测区域m中产生的散射光的运动即通过检测区域m的每个颗粒p的布朗运动进行观测,以规定的帧率拍摄为视频。
51.如此,通过在与第一区间32中的试样的流动对置的位置配置用于检测散射光的聚光光学系统40和拍摄器50,能观测散射光的运动(颗粒p的布朗运动)。
52.〔控制运算单元的结构:参照图1〕
53.接着,对控制运算单元3的结构进行说明。
54.控制运算单元3例如由控制部60、图像获取部70、颗粒确定部80、移动量计算部90、移动量校正部100、粒径确定部110、散射光强度确定部120、解析部130、输出部140等构成。控制部60对检测单元2中的各设备的动作、控制运算单元3中执行的一系列处理进行控制。控制部60例如对由光源10进行的照射光的开/关、流入至流动池30的试样的流速(流量)、由拍摄器50进行的视频的拍摄进行控制。需要说明的是,也可以是,将对一系列处理的一部分或全部进行控制的部件与控制部60分开设置并在该部件中进行控制。例如,对于试样的流速,也可以将质量流量控制器等流量控制设备与控制部60分开设置并利用该设备来进行控制。
55.图像获取部70从由拍摄器50以规定的帧率拍摄到的视频中获取每帧的静止画面(帧图像)。需要说明的是,以如下方式对视频的帧率和试样的流速进行控制:能从拍摄到的视频中针对每个颗粒获取规定张数的帧图像。例如,检测区域m的y方向的长度为20μm,为了
从以30fps(即1秒内30次)拍摄的视频中获取十张帧图像,试样的流速设定为60μm/秒。
56.此外,颗粒确定部80从由图像获取部70获取到的帧图像中确定颗粒,将被捕捉至连续的帧图像中的每个颗粒建立关联,在此基础上确定每个颗粒的轨迹。
57.针对由颗粒确定部80确定出的颗粒,移动量计算部90按照每个帧图像来计算出通过布朗运动而产生的二维方向(x方向和z方向)的移动量。需要说明的是,在确定颗粒的轨迹的情况、计算移动量的情况下,使用颗粒的位置的代表值。颗粒的位置例如根据颗粒的重心、颗粒的中心等来确定。
58.针对由移动量计算部90计算出的颗粒的移动量,移动量校正部100使用预先准备的校正映射图中定义的校正值来对因由散焦位置引起的倍率变动而产生的移动量的误差进行校正。
59.粒径确定部110基于由移动量校正部100进行了校正的移动量来确定与扩散系数对应的每个颗粒的粒径。需要说明的是,与颗粒的移动量的计算和校正、粒径的确定相关的具体方法在后文中参照其他附图进行详细叙述。
60.散射光强度确定部120确定跟踪到的各颗粒的散射光量。具体而言,散射光强度确定部120基于在由颗粒确定部80确定了颗粒的情况下发送的图像信息,根据求出的相同颗粒的各亮点的亮度平均值、最大亮度值、二值化的面积等来确定颗粒的散射光强度等效值。
61.解析部130基于由粒径确定部110确定出的粒径,按照每个规定的粒径范围来计算出颗粒的个数浓度。此外,解析部130基于由粒径确定部110确定出的粒径和由散射光强度确定部120确定出的散射光强度等效值,按照每个颗粒来解析颗粒的折射率。具体而言,使用粒径已知且视为大致单一的粒径的试样颗粒,例如聚苯乙烯乳胶颗粒等,预先求出相对于已知的粒径和已知的折射率的相对散射光强度的关系,基于该关系来确定被测量颗粒的折射率,或者根据折射率的不同来进行固体颗粒与气泡的区分。
62.输出部140输出解析部130的解析结果。输出部140可以通过向屏幕显示、向打印机输出、向未图示的存储部输出或者经由网络向其他设备发送等各种方式来输出解析结果。
63.〔检测时的颗粒的样子〕
64.图4和图5是对检测时的颗粒的运动的样子进行说明的图。更具体而言,图4表示从与试样的流动方向垂直的方向观察检测区域m的情况下的样子即yz平面上的颗粒的样子。此外,图5表示成像于拍摄器50内的图像传感器的受光面时的照相方式即xz平面上的颗粒的样子。
65.如上所述,在本实施方式中,聚光光学系统40和拍摄器50配置于与试样的流动对置的位置,但由于颗粒的运动,会因聚光光学系统40的散焦而产生焦点移动。也就是说,倍率根据颗粒在y方向上的位置而变化,因此,拍摄的各帧图像中的像高会产生差异。此外,即使颗粒p1、p2、p3如图4所示分别以平行于y方向的方式移动,如图5所示,在xz平面上,这些颗粒也会因由散焦位置引起的倍率的变化而看上从检测区域m的中心朝向外侧移动。然后,从如此观察到的各颗粒发出的散射光成像于受光面。
66.〔因散焦而产生的误差〕
67.图6a和图6b是对因散焦而产生的粒径的误差进行说明的图。
68.图6a的本实施方式的聚光光学系统40中,其聚焦位置处的倍率为13.002293倍。例如,在物高为0.885mm的物体位于检测区域内的聚焦位置的情况下,成像于拍摄器50内的受
光面52的像高为11.507029mm。此外,在该物体位于向试样的流动方向(y方向)散焦(向聚光光学系统40靠近)了2μm的位置的情况下,成像于受光面52的像高为11.507432mm。
69.当根据图6b的散焦后的像高来试着计算假定物体位于聚焦位置的情况下的物高时(散焦后的像高
÷
聚焦位置处的倍率),结果为0.885031mm。也就是说,根据基于散焦后的像高的计算结果,聚焦位置处存在物高为0.885031mm的物体,与实际的物高0.885mm之间产生0.031μm的误差(移动量误差)。当以不考虑这样的由散焦产生的物高的误差的方式计算颗粒的通过布朗运动而产生的移动量时,误差会波及到颗粒的粒径。
70.因此,本实施方式中采用了如下方式:利用颗粒必然会从远处靠近聚光光学系统40(通过试样的流动而从远的位置被输送至近的位置)这一点,根据预先求出的倍率相对于散焦位置的校准曲线,对因由散焦引起的倍率变动而产生的颗粒的移动量的计算误差进行校正。
71.图7是表示倍率相对于散焦位置的校准曲线的图。
72.在本实施方式中,假定流入至流动池30的试样的流速固定,校准曲线是y方向上的距离的一次函数。通过将校准曲线假定为一次函数,能与散焦位置无关地将因散焦而产生的固定的间隔内的误差校正为固定量。
73.接着,对移动量的计算方法和校正方法进行说明。
74.图8是表示受光面52的像点的图。受光面52在横向(x方向)和纵向(z方向)上分别具有例如2448像素(px)的像点,以与xz平面对置的方式捕捉检测区域中产生的光。在xz平面上从颗粒产生的散射光成像于受光面52,由此,颗粒的布朗运动被拍摄器50拍摄为视频。
75.〔移动量的计算〕
76.当从由图像获取部70拍摄到的视频中获取到帧图像时,首先,颗粒确定部80根据从视频中获取到的帧图像来确定颗粒,求出各帧图像中的颗粒的重心坐标“(xi,zi)”。在此,“x
i”为第i帧的帧图像中的x坐标,“z
i”为第i帧的帧图像中的z坐标。
77.在此基础上,移动量计算部90确定颗粒的轨迹,根据各帧图像中的颗粒的重心坐标来计算出连续的帧之间的颗粒的x方向和z方向的各移动量。具体而言,移动量计算部90通过“x
i 1
-x
i”来计算出第i帧与第i 1帧之间的颗粒的x方向的移动量(μm),通过“z
i 1
-z
i”来计算出第i帧与第i 1帧之间的颗粒的z方向的移动量(μm)。也就是说,颗粒的x方向和z方向的各移动量是指,将表示xz平面上的从第i帧处的重心位置到第i 1帧处的重心位置的轨迹的矢量分解为x分量和z分量而得到的量。
78.〔移动量的校正〕
79.当通过移动量计算部90计算出了颗粒的x方向和z方向的各移动量时,接着,移动量校正部100参照预先准备的校正映射图来获取与颗粒的重心坐标的位置相应的校正值,针对由移动量计算部90计算出的x方向和z方向的各移动量,分别使用获取到的校正值,通过以下的算式来进行校正。
80.[数式1]
[0081]
δx(i)=(x
i 1-xi)-v
x(xi,zi)
δt
…
(1)
[0082]
δz(i)=(z
i 1-zi)-v
z(xi,zi)
δt
…
(2)
[0083]
在上述的算式(1)中,“δx
(i)”为校正后的x方向的移动量(μm)。此外,在上述的算式(2)中,“δz
(i)”为校正后的z方向的移动量(μm)。并且,算式(1)和(2)中的“δt”为帧率的
倒数,即由视频的帧率限定的时间间隔(s)。
[0084]
也就是说,“v
x(xi,zi)
δt”和“v
z(xi,zi)
δt”表示因与xz平面上的颗粒的重心坐标的位置相应的倍率差异而产生的帧之间的移动量误差(μm)。在此,“v
x(xi,zi)”和“v
z(xi,zi)”是基于表观上的移动速度的x方向分量和z方向分量而预先求出的校正值(μm/s)。通过将校正值定义为移动速度,即使在改变了帧率的情况下也能使用相同的算式来校正移动量。
[0085]
需要说明的是,各校正值因物高而异,因此,需要基于预先求出的每个物高的校正值来预先制作校正映射图。在本实施方式中,通过光学模拟软件预先计算与预先假定的物高的误差量(例如,上述的相对于0.885mm的物高的误差0.031μm)对应的校正值,制作了与该物高对应的校正映射图。需要说明的是,关于校正映射图的样式,在后文中使用其他附图来进一步阐述。
[0086]
〔粒径的确定〕
[0087]
当通过移动量校正部100校正了颗粒的x方向和z方向的各移动量时,接着,粒径确定部110基于校正后的各移动量来确定每个颗粒的粒径。具体而言,首先,粒径确定部110基于颗粒的校正后的x方向和z方向的各移动量,通过以下的算式来计算出平均移动量lr。
[0088]
[数式2]
[0089][0090]
在上述的算式(3)中,“l
r”为每帧(连续帧之间)的平均移动量(μm),“i”为帧编号,“m”为从帧图像中得到的移动量的个数。例如,在m=10的情况下,帧编号为1~11,颗粒的移动量基于11张帧图像来计算出,因此,根据这些帧图像而计算出的移动量的数量为10个。
[0091]
接着,粒径确定部110通过以下的算式来计算出扩散系数d。
[0092]
[数式3]
[0093]
d=lr/(4
·
δt)
…
(4)
[0094]
最后,粒径确定部110按照以下所示的斯托克斯-爱因斯坦公式来确定粒径d。
[0095]
[数式4]
[0096]
d=kb
·
t/(3π
·
η
·
d)
…
(5)
[0097]
在上述的算式(5)中,“kb”为玻尔兹曼常数,“t”为绝对温度,“η”为试样的粘性系数。
[0098]
〔通过校正实现的效果〕
[0099]
根据上述的算式(4)和(5),由帧率限定的时间间隔δt为1/120s(帧率为120fps)、绝对温度t为293.2k、粘度η为0.001pa
·
s的情况下的粒径100nm的颗粒的布朗运动中的平均移动量lr计算为0.378μm。
[0100]
在此,假设如图6a和图6b所说明的那样产生了0.031μm的移动量误差,以不进行移动量的校正的方式计算出的平均移动量为上述的0.378μm的平均移动量lr加上0.031μm的移动量误差而得到的0.409μm。并且,在该情况下,根据上述的算式(5),粒径d被确定为85nm。也就是说,在移动量中包含了误差的情况下,尽管颗粒的实际粒径为100nm,粒径也会被确定为差了15nm。
[0101]
与此相对,在本实施方式中,应用预先定义的校正值来进行颗粒的移动量的校正,由此对因散焦而产生的倍率的误差进行校正。因此,根据本实施方式,能更准确地求出颗粒的移动量,能提高粒径的测量精度。
[0102]
〔校正映射图〕
[0103]
接着,对校正映射图进行说明。
[0104]
校正映射图是按照每个物高预先求出、整理了用于对因散焦而产生的倍率的误差进行校正的校正值而得到的图。校正值因观测面上的位置而不同,因此,该校正值按照x坐标方向、z坐标方向的受光面的每个像点或每个区间来确定。在本实施方式中,如上所述按照每个预先规定的物高,通过光学模拟软件来计算校正值,并预先准备该校正值来作为与每个物高对应的校正映射图。
[0105]
图9a至图10b是对预先准备的校正映射图进行说明的图。其中,图9a和图9b示出了用于校正x方向的移动量的校正映射图(x方向校正映射图)的一个例子,图10a和图10b示出了用于校正z方向的移动量的校正映射图(z方向校正映射图)的一个例子。
[0106]
在各校正映射图中,定义有基于表观上的移动速度的x方向分量和z方向分量而预先求出的校正值。例如,假定帧率为120fps,颗粒在检测区域内以每帧(1/120s=8.333ms)2μm的速度穿过散焦位置-10μm~ 10μm的区间。此时,如使用图6a和图6b所说明过的,在物高为0.885mm的情况下,颗粒以在2μm的散焦下差0.031μm的方式移动,即每帧的误差量为0.031μm,因此,误差的速度可以表示为3.72μm/s(=0.031μm/8.333ms)。该速度在从检测区域的中心开始的同心圆上为相同的值,根据坐标的位置而在x方向和z方向上分解的各分量的值分别作为校正值被定义于各校正映射图中。也就是说,在各校正映射图中,定义有以速度单位表示根据坐标的位置而预先求出的误差量的值。
[0107]
需要说明的是,在上述的说明中,作为一个例子对物高为0.885mm的情况进行了说明,除此之外,还在各种物高下进行了计算而计算了误差量,制作了x方向和z方向的二维校正映射图。
[0108]
优选的是,校正值按照每个受光面的像点来设定,但为了计算处理的简化等,也可以按照每个固定区间来设定。例如,如图9a所示,在x方向校正映射图中,检测区域在x方向上被分成了大致等分的十个区域。如图9b所示,定义有针对这些区域的x坐标的范围和在与该范围对应的情况下应用的校正值。当参照x方向校正映射图时,与z坐标的位置无关地只着眼于x坐标的位置来选择对应的区域,应用针对该区域的校正值。
[0109]
此外,如图10a所示,在z方向校正映射图中,检测区域在z方向上被分成了大致等分的十个区域。此外,如图10b所示,定义有针对这些区域的z坐标的范围和在与该范围对应的情况下应用的校正值。当参照z方向校正映射图时,与x坐标的位置无关地只着眼于z坐标的位置来选择对应的区域,应用针对该区域的校正值。
[0110]
例如,假设在图8所示的2448
×
2448的像点中的(xi,zi)=(2448,1)的位置存在观测到的颗粒的重心。关于该位置,当参照图9a和图9b所示的x方向校正映射图时,上述的x坐标与“区域10”对应。因此,针对校正前的x方向的移动量,应用校正值“3.359493”来计算出校正后的x方向的移动量δx(i)。此外,当参照图10a和图10b所示的z方向校正映射图时,上述的z坐标与“区域1”对应。因此,针对校正前的z方向的移动量,应用校正值
“‑
3.359493”来计算出校正后的z方向的移动量δz(i)。
[0111]
需要说明的是,图9a至图10b所示的校正映射图中的区域的分割方式仅为一个例子,不限于此。例如,既可以对区域进行进一步细分(例如,每10px进行分割),也可以在计算量充裕的情况下不分割区域而针对所有的像点各自定义校正值。无论如何,各校正值因物高而异,因此,需要按照每个物高来预先制作校正映射图。
[0112]
再者,针对误差量,除光学模拟之外,也可以考虑通过实测来预先求出这样的方法。然而,在通过实测来求误差量的情况下,除光学系统的倍率之外,还存在其他的误差因素(例如,试样的流速等),因此,需要与其他因素区分开来,但可以预料,因素的区分会有困难。与此相对,在本实施方式中,如上所述通过光学模拟来计算误差量,因此,无需考虑会产生误差的其他因素,能只以光学系统的误差为对象来求误差量。
[0113]
〔本发明的优越性〕
[0114]
如上所述,根据上述的实施方式,能得到如下的效果。
[0115]
(1)由于应用预先求出的校正值来校正颗粒的移动量,因此能对因散焦而产生的倍率的误差进行校正来更准确地求出颗粒的移动量,由此能提高粒径的测量精度。
[0116]
(2)由于将校正值定义为移动速度,因此即使在改变拍摄的视频的帧率来进行测量的情况下,也能使用与改变帧率之前相同的校正值来校正移动量。
[0117]
(3)由于将倍率相对于散焦位置的校准曲线假定为距离的一次函数,因此能与散焦位置无关地将因散焦而产生的固定间隔内的误差设为固定量来进行移动量的校正。
[0118]
(4)由于能对因散焦而产生的倍率的误差进行校正,因此无需用远心光学透镜来构成聚光光学系统40,聚光光学系统40的设计自由度提高。
[0119]
本发明不受上述的实施方式限制,能进行各种变形来实施。
[0120]
在上述的实施方式中,照射光学系统20通过将扩束器、衍射光学元件以及光学狭缝等组合来构成,但不限于此,例如,也可以通过将多片光学透镜组合来构成。
[0121]
在上述的实施方式中,使照射光bi从x方向射入至第一区间32,但也可以取而代之使照射光bi从z方向射入至第一区间32。
[0122]
在上述的实施方式中,以试样在流动池30中从第一开口31朝向第二开口33流动的方式导入试样,但不限于此,也可以以该试样从第二开口33朝向第一开口31流动的方式导入试样。此外,向流动池30的试样的导入也可以通过向作为入口的开口压送试样来进行,还可以通过从作为出口的开口抽吸试样来进行。
[0123]
另外,作为颗粒测量装置1的各构成部件的例子而列举的材料、数值等仅为示例,在实施本发明时当然能适当地变形。
[0124]
本技术是基于2020年3月17日申请的日本专利申请2020-046243号的申请,将其内容作为参照引用于此。
[0125]
附图标记说明
[0126]
1:颗粒测量装置;2:检测单元;3:控制运算单元;10:光源;20:照射光学系统;30:流动池;40:聚光光学系统;50:拍摄器;52:受光面;60:控制部;70:图像获取部;80:颗粒确定部;90:移动量计算部;100:移动量校正部;110:粒径确定部;120:散射光强度确定部;130:解析部;140输出部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
