1.本发明涉及无人机电力系统输电线路巡检领域,特别是涉及一种面向输电线无人机巡检的网络拥塞控制方法及系统。
背景技术:
2.近年来,随着我国经济水平的迅速发展,人们的用电需求不断增长,为此,国家大力推动电网的建设。电力安全问题成为关乎国计民生的大事,一旦电力系统的安全出现问题,我们的日常生活、工业生产以及商业活动都会受到巨大的影响,因此,对电力系统进行巡检维护是十分必要的。然而我国幅员辽阔、地形复杂,而且气象条件也较为多变,在这种情况下,电网规模的不断扩大给电网的日常运维工作带来了巨大的挑战。为了保证电力系统安全稳定的运行,找到一种可靠高效的电力巡检方式成为当务之急。
3.传统的电力系统输电线路巡检方式是依靠人力沿输电线路进行巡视检查,对于巡检人员来说,不仅工作量巨大,而且一旦遇到恶劣的天气状况,还会给巡检人员造成一定的风险,导致巡检工作无法进行。随着无人机技术的发展,无人机巡检作业的方式得到了极大的关注。用无人机代替人工完成输电线路的巡检,可以有效降低巡检人员的工作强度,提高巡检效率,同时也降低了人工巡检安全事故发生的概率,保障电力系统的稳定运行。在一些受地理环境、天气状况等因素影响较大的地区,无人机集群充分发挥其组网灵活的特点,实现端到端、可靠的数据传输,要求通信网络必须保证稳定可靠的信息交互,减少通信的延迟,保证信息交互的实时性。而当无人机节点接收数据包的速率大于其能够处理的速率时,就会产生拥塞,导致数据包的传输延迟或丢失,甚至造成整个网络的瘫痪。因此,有必要针对无人机自组网研究其拥塞控制与避免机制。
技术实现要素:
4.本发明的目的是提供一种面向输电线无人机巡检的网络拥塞控制方法及系统,以对数据传输过程中产生的拥塞进行有效的检测、控制与避免,使网络顺利完成数据传输。
5.为实现上述目的,本发明提供了如下方案:
6.一种面向输电线无人机巡检的网络拥塞控制方法,所述方法包括:
7.构建面向电力系统输电线路巡检的无人机自组织网络架构,并初始化无人机自组织网络架构中无人机节点的参数;所述参数包括总缓存空间、信息传输速率和剩余能量;
8.源节点根据aodv路由协议在无人机自组织网络架构中选择的信息传输路径向目的节点发送信息,并设置数据报告速率;
9.当目的节点的接收速率小于数据报告速率时,目的节点向所述信息传输路径上的各中间节点广播反压信号;
10.根据收到反压信号的各中间节点的总缓存空间、信息传输速率和当前已占用的缓存空间、实际占用信道量,计算各自当前的拥塞率;
11.当中间节点当前的拥塞率大于门限阈值时,判定该中间节点存在拥塞,并根据优
先级算法确定数据传输优先级,按照数据传输优先级进行顺序传输;
12.存在拥塞的中间节点向邻居节点广播反压信号以降低邻居节点的信息传输速率;
13.计算无人机自组织网络架构中各节点当前的拥塞率,并反馈给需要传输数据的节点;
14.根据各节点反馈的当前的拥塞率,需要传输数据的节点通过aodv路由协议重新选择传输路径。
15.可选的,所述源节点根据aodv路由协议在无人机自组织网络架构中选择的信息传输路径向目的节点发送信息,具体包括:
16.源节点在发送数据前向周围节点发送广播数据包;所述广播数据包包括数据传输所需要消耗的能量和所需占用的缓冲区长度;
17.若周围节点的剩余能量大于数据传输所需要消耗的能量且剩余缓冲空间大于数据传输所需占用的缓冲区长度,则该周围节点可作为中间节点;
18.可作为中间节点的周围节点向源节点发送数据包;
19.源节点根据aodv路由协议选择中间节点形成信息传输路径,并按照信息传输路径以传输速率txrt向目的节点发送信息。
20.可选的,所述各自当前的拥塞率的计算公式为
[0021][0022]
其中,ηi为收到反压信号的第i个中间节点当前的拥塞率,si为收到反压信号的第i个中间节点当前已占用的缓存空间,si为收到反压信号的第i个中间节点的总缓存空间,ci为收到反压信号的第i个中间节点的实际占用信道量,ci为收到反压信号的第i个中间节点的信道容量。
[0023]
可选的,所述根据优先级算法确定数据传输优先级,按照数据传输优先级进行顺序传输,具体包括:
[0024]
紧急情况对时延要求高的数据包设置第一优先级,对时延要求低的数据包设置第二优先级,没有时延要求的数据包设置第三优先级;
[0025]
对第三优先级的数据包进行丢弃,对第一优先级和第二优先级的数据包按照数据传输优先级进行顺序传输。
[0026]
可选的,所述根据各节点反馈的当前的拥塞率,需要传输数据的节点通过aodv路由协议重新选择传输路径,具体包括:
[0027]
按照拥塞率从小到大的顺序对各节点进行排序,并将排序后的节点按照排列顺序依次设置从高到低的优先级;
[0028]
根据各节点设置的优先级,采用节点优先级算法,通过aodv路由协议重新选择传输路径。
[0029]
一种面向输电线无人机巡检的网络拥塞控制系统,所述系统包括:
[0030]
网络构建模块,用于构建面向电力系统输电线路巡检的无人机自组织网络架构,并初始化无人机自组织网络架构中无人机节点的参数;所述参数包括总缓存空间、信息传输速率和剩余能量;
[0031]
信息传输模块,用于源节点根据aodv路由协议在无人机自组织网络架构中选择的
信息传输路径向目的节点发送信息,并设置数据报告速率;
[0032]
反压信号广播模块,用于当目的节点的接收速率小于数据报告速率时,目的节点向所述信息传输路径上的各中间节点广播反压信号;
[0033]
拥塞率计算模块,用于根据收到反压信号的各中间节点的总缓存空间、信息传输速率和当前已占用的缓存空间、实际占用信道量,计算各自当前的拥塞率;
[0034]
拥塞缓解模块,用于当中间节点当前的拥塞率大于门限阈值时,判定该中间节点存在拥塞,并根据优先级算法确定数据传输优先级,按照数据传输优先级进行顺序传输;
[0035]
信息传输速率降低模块,用于存在拥塞的中间节点向邻居节点广播反压信号以降低邻居节点的信息传输速率;
[0036]
拥塞率反馈模块,用于计算无人机自组织网络架构中各节点当前的拥塞率,并反馈给需要传输数据的节点;
[0037]
传输路径重新选择模块,用于根据各节点反馈的当前的拥塞率,需要传输数据的节点通过aodv路由协议重新选择传输路径。
[0038]
可选的,所述信息传输模块,具体包括:
[0039]
广播数据包发送子模块,用于源节点在发送数据前向周围节点发送广播数据包;所述广播数据包包括数据传输所需要消耗的能量和所需占用的缓冲区长度;
[0040]
中间节点选取子模块,用于若周围节点的剩余能量大于数据传输所需要消耗的能量且剩余缓冲空间大于数据传输所需占用的缓冲区长度,则该周围节点可作为中间节点;
[0041]
中间节点数据包发送子模块,用于可作为中间节点的周围节点向源节点发送数据包;
[0042]
信息传输路径形成子模块,用于源节点根据aodv路由协议选择中间节点形成信息传输路径,并按照信息传输路径以传输速率txrt向目的节点发送信息。
[0043]
可选的,所述各自当前的拥塞率的计算公式为
[0044][0045]
其中,ηi为收到反压信号的第i个中间节点当前的拥塞率,si为收到反压信号的第i个中间节点当前已占用的缓存空间,si为收到反压信号的第i个中间节点的总缓存空间,ci为收到反压信号的第i个中间节点的实际占用信道量,ci为收到反压信号的第i个中间节点的信道容量。
[0046]
可选的,所述拥塞缓解模块,具体包括:
[0047]
优先级设置子模块,用于紧急情况对时延要求高的数据包设置第一优先级,对时延要求低的数据包设置第二优先级,没有时延要求的数据包设置第三优先级;
[0048]
顺序传输子模块,用于对第三优先级的数据包进行丢弃,对第一优先级和第二优先级的数据包按照数据传输优先级进行顺序传输。
[0049]
可选的,所述传输路径重新选择模块,具体包括:
[0050]
排序子模块,用于按照拥塞率从小到大的顺序对各节点进行排序,并将排序后的节点按照排列顺序依次设置从高到低的优先级;
[0051]
传输路径重新选择子模块,用于根据各节点设置的优先级,采用节点优先级算法,通过aodv路由协议重新选择传输路径。
[0052]
根据本发明提供的具体实施例,本发明公开了以下技术效果:
[0053]
本发明公开一种面向输电线无人机巡检的网络拥塞控制方法及系统,构建无人机自组织网络架构,从源节点向目的节点发送信息过程中判断中间节点有没有发生拥塞,当发生拥塞时根据优先级算法确定数据传输优先级,按照数据传输优先级进行顺序传输,并向邻居节点广播反压信号以降低邻居节点的信息传输速率进行拥塞控制,计算无人机自组织网络架构中各节点当前的拥塞率,根据各节点反馈的当前的拥塞率,需要传输数据的节点通过aodv路由协议重新选择传输路径避免了拥塞,即整个过程包括网络构建、数据传输、拥塞控制、拥塞避免,对数据传输过程中产生的拥塞进行有效的检测、控制与避免,使网络顺利完成数据传输过程,保证稳定可靠的信息交互,减少通信的延迟,保证信息交互的实时性。
附图说明
[0054]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0055]
图1为本发明提供的一种面向输电线无人机巡检的网络拥塞控制方法的流程图;
[0056]
图2为本发明提供的一种面向输电线无人机巡检的网络拥塞控制过程的示意图;
[0057]
图3为本发明实施例提供的一种面向输电线无人机巡检的网络拥塞控制仿真结果对比图;图3(a)为源节点到目的节点的路由示意图,图3(b)为当传输路径中有节点发生拥塞时重新选择的路由示意图。
具体实施方式
[0058]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0059]
本发明的目的是提供一种面向输电线无人机巡检的网络拥塞控制方法及系统,以对数据传输过程中产生的拥塞进行有效的检测、控制与避免,使网络顺利完成数据传输。
[0060]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0061]
一种面向输电线无人机巡检的网络拥塞控制方法,方法包括:
[0062]
步骤1,构建面向电力系统输电线路巡检的无人机自组织网络架构,并初始化无人机自组织网络架构中无人机节点的参数;参数包括总缓存空间、信息传输速率和剩余能量。
[0063]
步骤2,源节点根据aodv路由协议在无人机自组织网络架构中选择的信息传输路径向目的节点发送信息,并设置数据报告速率。
[0064]
在一个示例中,具体包括:
[0065]
源节点在发送数据前向周围节点发送广播数据包;广播数据包包括数据传输所需要消耗的能量和所需占用的缓冲区长度;
[0066]
若周围节点的剩余能量大于数据传输所需要消耗的能量且剩余缓冲空间大于数据传输所需占用的缓冲区长度,则该周围节点可作为中间节点;
[0067]
可作为中间节点的周围节点向源节点发送数据包;
[0068]
源节点根据aodv路由协议选择中间节点形成信息传输路径,并按照信息传输路径以传输速率txrt向目的节点发送信息。
[0069]
步骤3,当目的节点的接收速率小于数据报告速率时,目的节点向信息传输路径上的各中间节点广播反压信号。
[0070]
步骤4,根据收到反压信号的各中间节点的总缓存空间、信息传输速率和当前已占用的缓存空间、实际占用信道量,计算各自当前的拥塞率。
[0071]
在一个示例中,各自当前的拥塞率的计算公式为
[0072][0073]
其中,ηi为收到反压信号的第i个中间节点当前的拥塞率,si为收到反压信号的第i个中间节点当前已占用的缓存空间,si为收到反压信号的第i个中间节点的总缓存空间,ci为收到反压信号的第i个中间节点的实际占用信道量,ci为收到反压信号的第i个中间节点的信道容量。
[0074]
步骤5,当中间节点当前的拥塞率大于门限阈值时,判定该中间节点存在拥塞,并根据优先级算法确定数据传输优先级,按照数据传输优先级进行顺序传输。
[0075]
在一个示例中,具体包括:
[0076]
紧急情况对时延要求高的数据包设置第一优先级,对时延要求低的数据包设置第二优先级,没有时延要求的数据包设置第三优先级;
[0077]
对第三优先级的数据包进行丢弃,对第一优先级和第二优先级的数据包按照数据传输优先级进行顺序传输。
[0078]
步骤6,存在拥塞的中间节点向邻居节点广播反压信号以降低邻居节点的信息传输速率。
[0079]
步骤7,计算无人机自组织网络架构中各节点当前的拥塞率,并反馈给需要传输数据的节点。
[0080]
步骤8,根据各节点反馈的当前的拥塞率,需要传输数据的节点通过aodv路由协议重新选择传输路径。
[0081]
在一个示例中,具体包括:
[0082]
按照拥塞率从小到大的顺序对各节点进行排序,并将排序后的节点按照排列顺序依次设置从高到低的优先级;
[0083]
根据各节点设置的优先级,采用节点优先级算法,通过aodv路由协议重新选择传输路径。
[0084]
为了进一步详细阐明本发明的网络拥塞控制方法,参照图1-2,本发明的面向输电线无人机巡检的网络拥塞控制方法的具体实现过程如下:
[0085]
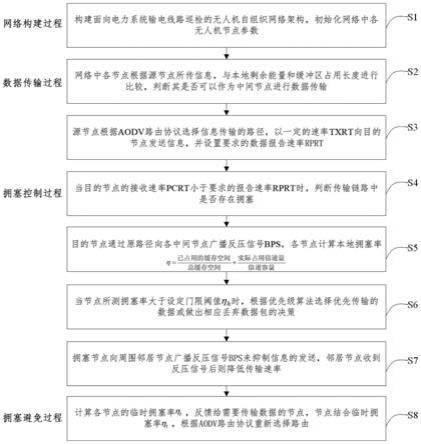
步骤s1:构建面向电力系统输电线路巡检的无人机自组织网络架构,初始化网络中各无人机节点参数,具体包括:
[0086]
步骤s11:根据电力系统输电线路巡检的场景特性,设置无人机网络的拓扑结构。
[0087]
步骤s12:初始化网络中节点的参数信息,包括位置坐标、剩余能量、缓存区所存储的数据包、发射信号功率以及信息传输速率。
[0088]
图2中uav1、uav2、uav3、uav4、uav5、uav6、uav7、uav8均为无人机节点。
[0089]
步骤s2:网络中各节点根据源节点所传信息,与本地剩余能量和缓冲区占用长度进行比较,判断其是否可作为中间节点进行数据传输,具体包括:
[0090]
步骤s21:源节点在发送数据前向周围节点发送广播数据包aov,其中包括数据传输所需要消耗的能量和缓冲区占用长度。
[0091]
步骤s22:周围节点收到广播数据包后,比较本地剩余能量与缓冲区剩余长度,若本地剩余能量大于传输所需能量,并且本地缓冲区剩余长度大于传输所需占用的缓冲区长度,则该节点可以作为中间节点传输数据。
[0092]
步骤s23:可作为中间节点传输数据的节点向源节点发送数据包opt。
[0093]
源节点在传输数据前,首先判断网络中各节点是否具备作为其中间节点传输数据的能力,将可用的节点作为其路由选择的范围。
[0094]
步骤s3:源节点根据aodv路由协议选择信息传输的路径,以一定的传输速率txrt向目的节点发送信息,并设置要求的数据报告速率rprt,具体包括:
[0095]
步骤s31:源节点在可以作为中间节点传输数据的节点中,根据aodv路由协议选择信息传输路径。
[0096]
步骤s32:源节点以一定的速率txrt沿传输路径向目的节点发送信息,并根据数据传输特性设置要求的数据报告速率rprt。
[0097]
图2中data1和data2为无人机节点之间传输的数据。
[0098]
步骤s4:当目的节点的接收速率pcrt小于要求的报告速率rprt时,判断传输链路中是否存在拥塞;
[0099]
步骤s5:目的节点通过原路径向各中间节点广播反压信号bps,各节点计算本地拥塞率,具体包括:
[0100]
步骤s51:目的节点通过原路径向各中间节点广播反压信号bps。
[0101]
步骤s52:收到反压信号的节点计算本地拥塞率:
[0102][0103]
步骤s6:当节点所测拥塞率大于设定门限阈值ηh时,根据优先级算法选择优先传输的数据或做出相应丢弃数据包的决策,具体包括:
[0104]
步骤s61:当节点所计算的拥塞率大于门限阈值ηh时,则判定为该节点存在拥塞。
[0105]
步骤s62:根据事件的重要程度设定优先级。包含紧急情况对时延要求较高的数据包设置最高优先级,在节点发生拥塞时优先传输;对时延要求较低的数据包设置较低优先级,可以延时传输;没有包含特殊情况的数据包设置为最低优先级,可以选择丢弃数据包。
[0106]
步骤s7:拥塞节点向周围邻居节点广播反压信号bps来抑制信息的发送,邻居节点接收到反压信号bps则降低信息传输速率;
[0107]
拥塞控制过程包括拥塞检测和拥塞缓解策略。其中,拥塞检测过程是当目的节点接收速率pcrt小于要求的报告速率rprt时,通过原路径向各中间节点广播反压信号bps,各节点计算本地拥塞率,当节点所测拥塞率大于设定门限阈值ηh时,判断为该节点拥塞,即步
骤4-5;拥塞缓解策略包括拥塞节点根据优先级算法选择优先传输的数据或做出相应丢弃数据包的决策、以及邻居节点降低其向拥塞节点的传输速率,即步骤6-7。
[0108]
步骤s8:计算各节点的临时拥塞率η
t
,反馈给需要传输数据的节点,节点结合临时拥塞率η
t
,根据aodv路由协议重新选择路由,具体包括:
[0109]
步骤s81:计算网络中各节点的临时拥塞率η
t
,并反馈给需要传输数据的节点。
[0110]
步骤s82:需要传输数据的节点根据各节点反馈的临时拥塞率η
t
,设置节点的优先级,临时拥塞率较低的节点设置较高的优先级,在路由选择时优先选择该节点,临时拥塞率较高的节点设置较低的优先级,在路由选择时避免选择该节点。
[0111]
步骤s83:根据节点优先级算法,通过aodv路由协议重新选择路由。
[0112]
本发明提出了一种面向输电线无人机巡检的网络拥塞控制协议设计,整个过程包括网络构建、数据传输、拥塞控制、拥塞避免,对数据传输过程中产生的拥塞进行有效的检测、控制与避免,使网络顺利完成数据传输过程,保证稳定可靠的信息交互,减少通信的延迟,保证信息交互的实时性。
[0113]
如图3所示,以一个具体的电力系统输电线路巡检的场景实施本发明的面向输电线无人机巡检的网络拥塞控制方法。
[0114]
网络部署面积为1000m*1000m,设置无人机节点10个(包括一个汇聚节点sink),随机分布在所部署的网络中。
[0115]
按照本发明的方法:
[0116]
1)要求节点7向汇聚节点发送给数据,选择传输路径7-5-sink,如图3(a)。
[0117]
2)同时设置节点9向中间节点5快速传输数据,导致中间节点5拥塞。
[0118]
3)源节点7接收到反压信号bps,根据各节点计算的本地临时拥塞率设置节点优先级,根据aodv路由协议重新选择传输路径7-1-9-sink,如图3(b),7-1-9-sink中的1表示重新选择的中间节点1。
[0119]
本发明还提供了一种面向输电线无人机巡检的网络拥塞控制系统,系统包括:
[0120]
网络构建模块,用于构建面向电力系统输电线路巡检的无人机自组织网络架构,并初始化无人机自组织网络架构中无人机节点的参数;参数包括总缓存空间、信息传输速率和剩余能量;
[0121]
信息传输模块,用于源节点根据aodv路由协议在无人机自组织网络架构中选择的信息传输路径向目的节点发送信息,并设置数据报告速率;
[0122]
反压信号广播模块,用于当目的节点的接收速率小于数据报告速率时,目的节点向信息传输路径上的各中间节点广播反压信号;
[0123]
拥塞率计算模块,用于根据收到反压信号的各中间节点的总缓存空间、信息传输速率和当前已占用的缓存空间、实际占用信道量,计算各自当前的拥塞率;
[0124]
拥塞缓解模块,用于当中间节点当前的拥塞率大于门限阈值时,判定该中间节点存在拥塞,并根据优先级算法确定数据传输优先级,按照数据传输优先级进行顺序传输;
[0125]
信息传输速率降低模块,用于存在拥塞的中间节点向邻居节点广播反压信号以降低邻居节点的信息传输速率;
[0126]
拥塞率反馈模块,用于计算无人机自组织网络架构中各节点当前的拥塞率,并反馈给需要传输数据的节点;
[0127]
传输路径重新选择模块,用于根据各节点反馈的当前的拥塞率,需要传输数据的节点通过aodv路由协议重新选择传输路径。
[0128]
信息传输模块,具体包括:
[0129]
广播数据包发送子模块,用于源节点在发送数据前向周围节点发送广播数据包;广播数据包包括数据传输所需要消耗的能量和所需占用的缓冲区长度;
[0130]
中间节点选取子模块,用于若周围节点的剩余能量大于数据传输所需要消耗的能量且剩余缓冲空间大于数据传输所需占用的缓冲区长度,则该周围节点可作为中间节点;
[0131]
中间节点数据包发送子模块,用于可作为中间节点的周围节点向源节点发送数据包;
[0132]
信息传输路径形成子模块,用于源节点根据aodv路由协议选择中间节点形成信息传输路径,并按照信息传输路径以传输速率txrt向目的节点发送信息。
[0133]
各自当前的拥塞率的计算公式为
[0134][0135]
其中,ηi为收到反压信号的第i个中间节点当前的拥塞率,si为收到反压信号的第i个中间节点当前已占用的缓存空间,si为收到反压信号的第i个中间节点的总缓存空间,ci为收到反压信号的第i个中间节点的实际占用信道量,ci为收到反压信号的第i个中间节点的信道容量。
[0136]
拥塞缓解模块,具体包括:
[0137]
优先级设置子模块,用于紧急情况对时延要求高的数据包设置第一优先级,对时延要求低的数据包设置第二优先级,没有时延要求的数据包设置第三优先级;
[0138]
顺序传输子模块,用于对第三优先级的数据包进行丢弃,对第一优先级和第二优先级的数据包按照数据传输优先级进行顺序传输。
[0139]
传输路径重新选择模块,具体包括:
[0140]
排序子模块,用于按照拥塞率从小到大的顺序对各节点进行排序,并将排序后的节点按照排列顺序依次设置从高到低的优先级;
[0141]
传输路径重新选择子模块,用于根据各节点设置的优先级,采用节点优先级算法,通过aodv路由协议重新选择传输路径。
[0142]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0143]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
