技术特征:
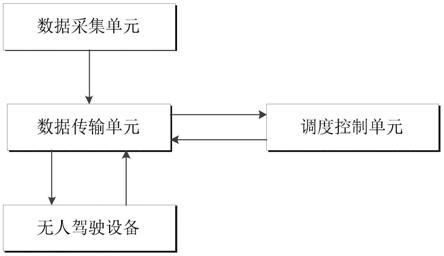
1.一种外排型排土场的无人调度系统,其特征在于:包括数据采集单元、数据传输单元、调度控制单元和无人驾驶设备;其中,数据采集单元用于实时采集矿场的外排型排土场的排土区域情况和无人驾驶设备的位置和运动数据;数据传输单元用于实现数据采集单元、调度控制单元之间和无人驾驶设备之间的数据与控制信号的传输;调度控制单元用于根据数据采集单元采集到的数据实时识别矿场的外排型排土场的排土区域的边界;根据获取的外排型排土场的排土区域的边界实时更新排土点,并根据每个排土点的排土量对无人驾驶设备进行调度。2.根据权利要求1所述的外排型排土场的无人调度系统,其特征在于:所述数据采集单元包括排土场内数据采集子单元和车载数据采集子单元,其中,所述排土场内数据采集子单元包括可移动基体、设置在可移动基体顶部的三轴云台、rtk定位主天线、rtk定位方向天线和非重复扫描式雷达,三轴云台上固定有固定架,固定架包括横杆和竖杆,固定架的竖杆固定在三轴云台的中心位置,竖杆垂直于三轴云台的平面,固定架的横杆固定在竖杆上,横杆穿过竖杆的轴线,且竖杆和横杆相互垂直;rtk定位主天线竖直固定在竖杆的顶端,rtk定位方向天线和非重复扫描式雷达分别设置在横杆的两端,且rtk定位方向天线与横杆相互垂直;rtk接收机设置在可移动基体上;车载数据采集子单元包括rtk接收机,分别设置在无人驾驶设备的顶部。3.根据权利要求1所述的外排型排土场的无人调度系统,其特征在于:所述调度控制单元包括排土场的排土区域分析子单元、排土点分析子单元和调度与路径规划子单元;其中,排土场的排土区域分析子单元根据数据采集单元采集到的数据实时识别外排型排土场的排土区域的边界,并根据识别结果调整数据采集单元的位置,使数据采集单元位于排土区域的的中心;同时计算当前排土区域的面积,判断当前排土场区域的面积是否达到排土场规划的面积,如果达到排土场规划的面积,则发出指令停止排土;如果没有达到,则发出继续排土的指令;排土点分析子单元根据实时识别得到的外排型排土场的排土区域的边界更新排土点,使相邻两个排土点之间的距离为设定距离阈值;同时实时判断每个排土点的土方倾倒数量是否超过预先设定的每个排土点的土方倾倒量阈值;如果超过,则发送指令修整排土场边界的指令和对应排土点停止排土指令;如果没有超过,则发出继续排土的指令;调度与路径规划子单元对无人驾驶设备进行调度和行动路径的规划。4.根据权利要求2所述的外排型排土场的无人调度系统,其特征在于:识别矿场的外排型排土场的排土区域的边界的方法包括以下步骤:步骤1-1:将rtk定位主天线的经纬度和高度坐标position_rtk(longitude,latitude,altitude)转换到utm坐标系下得到rtk定位主天线在utm坐标系下的坐标position_rtk_utm(easting,northing,altitude);步骤1-2:根据公式map_pointcloud[i]=r
i
*(r*queue_pointcloud[i] t)得到第i个航向角对应的排土区域拼接点云地图中的点云数据;遍历航向角序列queue_yaw和排土区域的点云序列queue_pointcloud中的所有数据;得到排土区域拼接点云地图map_pointcloud{map_pointcloud[0]、map_pointcloud[1]、
…
、map_pointcloud[i]、
…
、map_pointcloud
[359]};其中,queue_yaw[i]表示航向角序列中第i个航向角;r表示从非重复扫描式雷达到rtk定位主天线的旋转矩阵;t表示从非重复扫描式雷达到rtk定位主天线的平移矩阵;queue_pointcloud[i]表示第i个航向角对应的排土区域的点云序列queue_pointcloud中第i组点云数据;步骤1-3:根据地面提取算法在排土区域拼接点云地图map_pointcloud中提取地面点云,得到地面点集合ground_pointcloud;步骤1-4:在地面点集合ground_pointcloud中找到排土区域边缘点集合point_edge;以rtk定位主天线在地面投影点为圆心,将地面平均分成圆心角相等的区域;在每个区域中包含的地面点集合ground_pointcloud中的点中,找到距离圆心最远的点;则将该点保存到排土区域边缘点集合point_edge中;步骤1-5:将排土区域边缘点集合point_edge中的所有点转换到utm坐标系下,得到utm坐标系下的排土区边缘点集合point_edge_utm;步骤1-6:将utm坐标系下的排土区边缘点集合point_edge_utm中的相邻点依次连接,得到排土场的排土区域的边界。5.根据权利要求4所述的外排型排土场的无人调度系统,其特征在于:所述步骤1-4中圆心角为0.1
°
。6.根据权利要求1所述的外排型排土场的无人调度系统,其特征在于:无人驾驶设备包括无人驾驶矿场卡车和无人驾驶推土机。7.一种外排型排土场的无人调度方法,其特征在于:包括排土场的排土区域分析;排土点分析和调度与路径规划;排土场的排土区域分析通过数据采集单元采集到的数据实时识别外排型排土场的排土区域的边界,并根据识别结果调整数据采集单元的位置,使数据采集单元位于排土区域的的中心;同时计算当前排土区域的面积,判断当前排土场区域的面积是否达到排土场规划的面积,如果达到排土场规划的面积,则发出指令停止排土;如果没有达到,则发出继续排土的指令;排土点分析根据实时识别得到的外排型排土场的排土区域的边界更新排土点,使相邻两个排土点之间的距离为设定距离阈值;同时实时判断每个排土点的土方倾倒数量是否超过预先设定的每个排土点的土方倾倒量阈值;如果超过,则发送指令修整排土场边界的指令和对应排土点停止排土指令;如果没有超过,则发出继续排土的指令;调度与路径规划对无人驾驶设备进行调度和行动路径的规划。8.根据权利要求7所述外排型排土场的无人调度方法,其特征在于:所述数据采集单元包括排土场内数据采集子单元和车载数据采集子单元,其中,所述排土场内数据采集子单元包括可移动基体、设置在可移动基体顶部的三轴云台、rtk定位主天线、rtk定位方向天线和非重复扫描式雷达,三轴云台上固定有固定架,固定架包括横杆和竖杆,固定架的竖杆固定在三轴云台的中心位置,竖杆垂直于三轴云台的平面,固定架的横杆固定在竖杆上,横杆穿过竖杆的轴线,且竖杆和横杆相互垂直;rtk定位主天线竖直固定在竖杆的顶端,rtk定位方向天线和非重复扫描式雷达分别设置在横杆的两端,且rtk定位方向天线与横杆相互垂
直;rtk接收机设置在可移动基体上;车载数据采集子单元包括rtk接收机,分别设置在无人驾驶设备的顶部;采集数据时,将可移动基体移动到外排型排土场的中心位置,先通过调整三轴云台上的电机调整三轴云台,使其平面始终保持水平;然后使三轴云台围绕竖杆所在的轴旋转,从而横杆在三轴云台的带动下围绕竖杆旋转,每隔1秒钟沿顺时针方向旋转1次,每次旋转1
°
;横杆不旋转时,非重复扫描式雷达开始扫描,非重复扫描式雷达每次扫描的持续时间为1秒钟。9.根据权利要求7所述的外排型排土场的无人调度方法,其特征在于:在调度与路径规划中的无人驾驶设备包括无人驾驶矿场卡车和无人驾驶推土机,无人驾驶矿场卡车的调度方法为:步骤2-1:初始状态下,无人驾驶矿场卡车在排土场的出入口按顺序排成一列;按顺序依次驶向正在工作的排土点;直到每个排土点均有无人驾驶矿场卡车后,其他无人驾驶矿场卡车在在排土场的出入口按顺序排成一列等候;步骤2-2:根据公式:time
预计等待时间
=time
平均等待时间-time
当前排土点矿卡排土作业耗时
实时计算每个正在工作的排土点预计等待时间,根据计算得到的正在工作的排土点预计等待时间从小到大排序,并将对应的排土点序号按照预计等待时间从小到大排序进行排列;得到排土点序列;其中,time
平均等待时间
为无人驾驶矿场卡车的历史排土作业耗时算术平均值,time
当前排土点矿卡排土作业耗时
等于当前时间减去无人驾驶矿场卡车到达排土点进入排土作业时的时间点;步骤2-3:根据等候在排土场的出入口的无人驾驶矿场卡车车队中每辆无人驾驶矿场卡车与排土场的出入口的距离,从小到大进行排序,得到等候无人驾驶矿场卡车序列;步骤2-4:将等候无人驾驶矿场卡车序列中的无人驾驶矿场卡车按顺序依次调度到排土点序列中的对应编号的排土点进行排土;直到排土点序列中每个排土点均安排了无人驾驶矿场卡车进行排土。10.一种存储软件的计算机可读介质,其特征在于,所述软件包括能通过一个或多个计算机执行的指令,所述指令通过这样的执行使得所述一个或多个计算机执行操作,所述操作包括如权利要求7-9中任意一项所述的外排型排土场的无人调度方法的流程。
技术总结
本发明公开一种外排型排土场的无人调度系统,包括数据采集单元、数据传输单元、调度控制单元和无人驾驶设备;其中,数据采集单元用于实时采集矿场的外排型排土场的排土区域情况和无人驾驶设备的位置和运动数据;数据传输单元用于实现数据采集单元、调度控制单元之间和无人驾驶设备之间的数据与控制信号的传输;调度控制单元用于根据数据采集单元采集到的数据实时识别矿场的外排型排土场的排土区域的边界;根据获取的外排型排土场的排土区域的边界实时更新排土点,并根据每个排土点的排土量对无人驾驶设备进行调度。发明提供的无人调度系统在无需人工干预的条件下完成涉及排土场作业的多种设备的动态任务调度,更加科学,能够做到真正的减员增效。能够做到真正的减员增效。能够做到真正的减员增效。
技术研发人员:ꢀ(74)专利代理机构
受保护的技术使用者:奥特酷智能科技(南京)有限公司
技术研发日:2022.01.26
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。