技术特征:
1.基于潜在关系预测的双仿射重叠关系抽取方法,其特征在于,包括以下步骤:将用于重叠关系抽取的句子预处理为索引的形式;将每个句子中的单词转换为索引后的长度,生成初始值为零的三维目标矩阵;通过对句子中每个词与其自身以及前面的每个词和后面的每个词均进行一次握手配对以标记所述三维目标矩阵;将索引形式的句子和标记后的三维目标矩阵输入至bert模型进行微调训练,得到含有潜在关系的隐藏层向量;对所述隐藏层向量进行线性变换得到与所述三维目标矩阵具有相同形状的矩阵;训练完成并验证后得到最终的bert模型;采用所述最终的bert模型实现双仿射重叠关系抽取。2.根据权利要求1所述的基于潜在关系预测的双仿射重叠关系抽取方法,其特征在于,所述将用于重叠关系抽取的句子预处理为索引的形式方法为:采用分词器将用于重叠关系抽取的句子转换为索引的形式。3.根据权利要求1所述的基于潜在关系预测的双仿射重叠关系抽取方法,其特征在于,所述三维目标矩阵为[最大句子长度*最大句子长度*(关系类别数 4)]。4.根据权利要求1所述的基于潜在关系预测的双仿射重叠关系抽取方法,其特征在于,所述通过对句子中每个词与其自身以及前面的每个词和后面的每个词均进行一次握手配对以标记所述三维目标矩阵的过程包括:如果三元组中的主体实体在前,客体实体在后,则对目标矩阵的上三角部分进行后面的标记操作;如果三元组中的客体实体在前,主体实体在后,则对目标矩阵的下三角部分进行后面的标记操作。5.根据权利要求4所述的基于潜在关系预测的双仿射重叠关系抽取方法,其特征在于,所述如果三元组中的主体实体在前,客体实体在后,则对目标矩阵的上三角部分进行后面的标记操作具体包括:如果配对的两个词是三元组中主体实体的头和客体实体的头,则将目标矩阵的第三维的最后一个位置标记为1,且将主体实体和客体实体对应的关系类别在第三维的相应位置标记为1;如果配对的两个词是三元组中的主体实体的头和客体实体的尾,将目标矩阵的第三维的倒数第二个位置标记为1,且将主体实体和客体实体对应的关系类别在第三维的相应位置标记为1;如果配对的两个词是三元组中的主体实体的尾和客体实体的头,将目标矩阵的第三维的倒数第三个位置标记为1,且将主体实体和客体实体对应的关系类别在第三维的相应位置标记为1;如果配对的两个词是三元组中的主体实体的尾和客体实体的尾,将目标矩阵的第三维的倒数第四个位置标记为1,且将主体实体和客体实体对应的关系类别在第三维的相应位置标记为1。6.根据权利要求5所述的基于潜在关系预测的双仿射重叠关系抽取方法,其特征在于,所述如果三元组中的客体实体在前,主体实体在后,则对目标矩阵的下三角部分进行后面的标记操作具体包括:
如果配对的两个词是三元组中客体实体的头和主体实体的头,则将目标矩阵的第三维的最后一个位置标记为1,且将客体实体和主体实体对应的关系类别在第三维的相应位置标记为1;如果配对的两个词是三元组中的客体实体的头和主体实体的尾,将目标矩阵的第三维的倒数第二个位置标记为1,且将客体实体和主体实体对应的关系类别在第三维的相应位置标记为1;如果配对的两个词是三元组中的客体实体的尾和主体实体的头,将目标矩阵的第三维的倒数第三个位置标记为1,且将客体实体和主体实体对应的关系类别在第三维的相应位置标记为1;如果配对的两个词是三元组中的客体实体的尾和主体实体的尾,将目标矩阵的第三维的倒数第四个位置标记为1,且将客体实体和主体实体对应的关系类别在第三维的相应位置标记为1。7.根据权利要求1所述的基于潜在关系预测的双仿射重叠关系抽取方法,其特征在于,所述将索引形式的句子和标记后的三维目标矩阵输入至bert模型进行微调训练,得到含有潜在关系的隐藏层向量的过程为:获取bert最后一层的隐藏向量,并利用所述最后一层的隐藏向量对句子先进行潜在关系的预测;得到所述潜在关系之后,对得到的每一种关系进行嵌入编码操作,然后将潜在的关系向量进行相加,然后将所述相加后的潜在的关系向量加到训练过程中bert最后一层的每个词对应的隐藏向量上,得到含有潜在关系的隐藏层向量。8.根据权利要求7所述的基于潜在关系预测的双仿射重叠关系抽取方法,其特征在于,所述对所述隐藏层向量进行线性变换得到与所述三维目标矩阵具有相同形状的矩阵包括:首先使用两个线性变换,分别得到句子中的每个词作为主体实体的向量表示和作为客体实体的向量表示;将所述主体实体的向量表示和客体实体的向量表示分别输入至双仿射模型中得到双仿射模型矩阵;所述双仿射模型矩阵表示为[最大句子长度*最大句子长度*隐藏层大小];双仿射模型矩阵再经过一次线性变换,采用激活函数激活之后,得到与所述三维目标矩阵具有相同形状的矩阵;所述与所述三维目标矩阵具有相同形状的矩阵表示为[最大句子长度*最大句子长度*(关系类别数 4)]。9.根据权利要求8所述的基于潜在关系预测的双仿射重叠关系抽取方法,其特征在于,所述采用所述最终的bert模型实现双仿射重叠关系抽取的过程为:将测试数据输入至最终的bert模型中,得到最终三维矩阵;所述最终三维矩阵表示为[最大句子长度*最大句子长度*(关系类别数 4)];对所述最终三维矩阵上三角部分进行解码,通过使用主体实体头-客体实体头和主体实体尾-客体实体尾以及主体实体头-客体实体尾和主体实体尾-客体实体尾的依存关系即可确定主体实体;使用主体实体头-客体实体头和主体实体头-客体实体尾以及主体实体尾-客体实体头和主体实体尾客体实体尾即可确定客体实体;再通过依存关系上的关系类别索引即可确定主体和客体对应的关系类别;得到正向的<主体,关系,客体>三元组;
同样再对矩阵表示的下三角部分进行解码,便可得到反向的<客体,关系,实体>三元组。10.基于潜在关系预测的双仿射重叠关系抽取系统,其特征在于,包括预处理模块、标记模块和训练抽取模块;所述预处理模块用于将用于重叠关系抽取的句子预处理为索引的形式;将每个句子中的单词转换为索引后的长度,生成初始值为零的三维目标矩阵;所述标记模块用于通过对句子中每个词与其自身以及前面的每个词和后面的每个词均进行一次握手配对以标记所述三维目标矩阵;所述训练抽取模块用于将索引形式的句子和标记后的三维目标矩阵输入至bert模型进行微调训练,得到含有潜在关系的隐藏层向量;对所述隐藏层向量进行线性变换得到与所述三维目标矩阵具有相同形状的矩阵;训练完成并验证后得到最终的bert模型;采用所述最终的bert模型实现双仿射重叠关系抽取。
技术总结
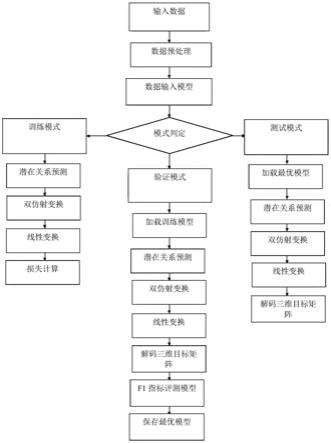
本发明提出了基于潜在关系预测的双仿射重叠关系抽取方法和系统,该方法包括:将用于重叠关系抽取的句子预处理为索引形式;将句子中单词转换为索引后的长度生成三维目标矩阵;通过对句子中每个词与其自身、前面和后面的每个词均进行握手配对以标记三维目标矩阵;将索引形式的句子和标记后的三维目标矩阵输入至Bert模型进行训练得到含有潜在关系的隐藏层向量;对隐藏层向量进行线性变换得到与三维目标矩阵具有相同形状的矩阵;训练完成并验证后得到最终模型;采用最终模型实现双仿射重叠关系抽取,基于该方法,还提出抽取系统。本发明通过潜在的关系预测和双仿射变换,能够有效利用句子中潜在的关系去提取出每个关系对应的实体。体。体。
技术研发人员:刘震 张晓明 李峰 徐涛 李雪松 张国明
受保护的技术使用者:国家电网有限公司
技术研发日:2021.12.14
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。