技术特征:
1.一种动态占据栅格估计方法,其特征在于,所述方法包括:对k时刻的激光点云数据进行处理,得到前景点云;所述前景点云为非地面点云;将所述前景点云映射至障碍物占据栅格地图中,得到前景点云在k时刻对应的占据栅格单元;根据前景点云在k时刻对应的占据栅格单元,确定前景点云在k 1时刻对应的占据栅格单元;在k 1时刻,根据k时刻的第一数量个粒子的状态值,进行预测,得到k 1时刻第二数量个粒子的预测状态值;所述第一数量个粒子包括第k-1时刻的第三数量个粒子以及第四数量个初始化的新粒子;所述第三数量和所述第四数量之和为第一数量;所述状态值包括粒子位置和粒子速度;根据k 1时刻第二数量个粒子的预测状态值和前景点云在k 1时刻对应的占据栅格单元,更新k 1时刻前景点云对应的占据栅格单元,得到k 1时刻的目标占据栅格单元;所述目标占据栅格单元包括速度信息和位置信息;所述第二数量个粒子为处于k 1时刻对应的占据栅格单元中的粒子。2.根据权利要求1所述的方法,其特征在于,所述方法之前还包括:以地面平面为基准,将激光点云数据划分至预设的栅格中;计算所述栅格地图中的任一栅格中,高度最大点和高度最小点的高度差值,得到第一高度差值;当所述第一高度差值小于预设的第一高度阈值时,确定所述任一栅格为第一栅格,并确定所述第一栅格内的点云为疑似地面点;根据全部所述第一栅格的疑似地面点,拟合得到地面模型;计算所述地面模型中的每个点至所述地面平面的高度差值,得到第二高度差值;确定所述第二高度差值不小于预设的第二高度阈值时的点构成前景点云。3.根据权利要求1所述的方法,其特征在于,所述方法之前还包括:对第一时刻的激光点云数据进行处理,得到第一时刻的前景点云;将所述第一时刻的前景点云映射至障碍物占据栅格地图中,得到第一时刻的前景点云对应的占据栅格单元;根据前景点云在第一时刻对应的占据栅格单元,确定前景点云在占据栅格单元的占据概率;初始化第一数量个粒子;根据所述占据概率,将所述第一数量个粒子设置在所述第一时刻对应的占据栅格单元中。4.根据权利要求1所述的方法,其特征在于,所述根据k 1时刻第四数量个粒子的预测状态值和前景点云在k 1时刻对应的占据栅格单元,更新k 1时刻前景点云对应的占据栅格单元,得到k 1时刻的目标占据栅格单元,具体包括:确定k 1时刻第一数量个粒子所在的占据栅格单元与前景点云在k 1时刻对应的占据栅格单元的重合占据栅格单元;确定所述重合占据栅格单元中粒子的数量为第二数量;初始化第五数量个粒子;所述第二数量与所述第五数量之和为第一数量;
根据所述重合占据栅格单元的数量,将所述第三数量个粒子设置在所述重合占据栅格单元中;所述重合占据栅格单元为所述目标占据栅格。5.根据权利要求4所述的方法,其特征在于,所述方法之后还包括:为所述第三数量个粒子设置随机状态值;根据所述第二数量个粒子的状态值和所述第三数量个粒子的随机状态值,得到所述目标占据栅格中的各栅格的位置信息和速度信息。6.一种动态占据栅格估计装置,其特征在于,所述装置包括:处理单元,所述处理单元用于对k时刻的激光点云数据进行处理,得到前景点云;所述前景点云为非地面点云;映射单元,所述映射单元用于将所述前景点云映射至障碍物占据栅格地图中,得到前景点云在k时刻对应的占据栅格单元;确定单元,所述确定单元用于根据前景点云在k时刻对应的占据栅格单元,确定前景点云在k 1时刻对应的占据栅格单元;预测单元,所述预测单元用于在k 1时刻,根据k时刻的第一数量个粒子的状态值,进行预测,得到k 1时刻第二数量个粒子的预测状态值;所述第一数量个粒子包括第k-1时刻的第三数量个粒子以及第四数量个初始化的新粒子;所述第三数量和所述第四数量之和为第一数量;所述状态值包括粒子位置和粒子速度;更新单元,所述更新单元用于根据k 1时刻第二数量个粒子的预测状态值和前景点云在k 1时刻对应的占据栅格单元,更新k 1时刻前景点云对应的占据栅格单元,得到k 1时刻的目标占据栅格单元;所述目标占据栅格单元包括速度信息和位置信息;所述第二数量个粒子为处于k 1时刻对应的占据栅格单元中的粒子。7.根据权利要求6所述的装置,其特征在于,所述装置还包括:划分单元,所述划分单元用于以地面平面为基准,将激光点云数据划分至预设的栅格中;计算单元,所述计算单元用于计算所述栅格地图中的任一栅格中,高度最大点和高度最小点的高度差值,得到第一高度差值;所述确定单元还用于当所述第一高度差值小于预设的第一高度阈值时,确定所述任一栅格为第一栅格,并确定所述第一栅格内的点云为疑似地面点;拟合单元,所述拟合单元用于根据全部所述第一栅格的疑似地面点,拟合得到地面模型;所述计算单元还用于计算所述地面模型中的每个点至所述地面平面的高度差值,得到第二高度差值;所述确定单元还用于确定所述第二高度差值不小于预设的第二高度阈值时的点构成前景点云。8.根据权利要求6所述的装置,其特征在于,所述处理单元还用于,对第一时刻的激光点云数据进行处理,得到第一时刻的前景点云;所述映射单元还用于,将所述第一时刻的前景点云映射至障碍物占据栅格地图中,得到第一时刻的前景点云对应的占据栅格单元;
所述确定单元还用于,根据前景点云在第一时刻对应的占据栅格单元,确定前景点云在占据栅格单元的占据概率;初始化单元,所述初始化单元用于初始化第一数量个粒子;设置单元,所述设置单元用于根据所述占据概率,将所述第一数量个粒子设置在所述第一时刻对应的占据栅格单元中。9.根据权利要求6所述的装置,其特征在于,所述更新单元具体用于:确定k 1时刻第一数量个粒子所在的占据栅格单元与前景点云在k 1时刻对应的占据栅格单元的重合占据栅格单元;确定所述重合占据栅格单元中粒子的数量为第二数量;初始化第五数量个粒子;所述第二数量与所述第五数量之和为第一数量;根据所述重合占据栅格单元的数量,将所述第三数量个粒子设置在所述重合占据栅格单元中;所述重合占据栅格单元为所述目标占据栅格。10.根据权利要求9所述的装置,其特征在于,所述设置单元还用于,为所述第三数量个粒子设置随机状态值;所述确定单元还用于,根据所述第二数量个粒子的状态值和所述第三数量个粒子的随机状态值,得到所述目标占据栅格中的各栅格的位置信息和速度信息。
技术总结
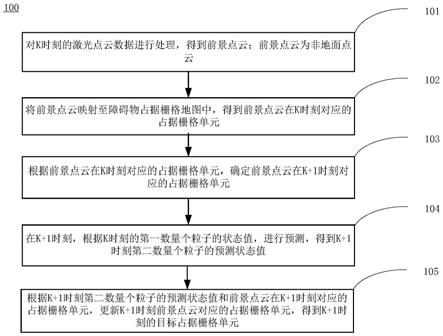
本发明提供了一种动态占据栅格估计方法及装置,方法包括:对K时刻的激光点云数据进行处理,得到前景点云并将其映射至障碍物占据栅格地图中,得到前景点云在K时刻对应的占据栅格单元;在K 1时刻,根据K时刻的第一数量个粒子的状态值,进行预测,得到K 1时刻第二数量个粒子的预测状态值;第一数量个粒子包括第K-1时刻的第三数量个粒子以及第四数量个初始化的新粒子;根据K 1时刻第二数量个粒子的预测状态值和前景点云在K 1时刻对应的占据栅格单元,更新K 1时刻前景点云对应的占据栅格单元,得到K 1时刻的目标占据栅格单元。由此,通过目标占据栅格单元的速度信息和位置信息,得到障碍物的位置信息和速度信息。碍物的位置信息和速度信息。碍物的位置信息和速度信息。
技术研发人员:张蓉 熊祺 张放 李晓飞 张德兆 王肖 霍舒豪
受保护的技术使用者:北京智行者科技有限公司
技术研发日:2020.10.12
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。