1.本实用新型涉及激光雷达技术领域,更具体的说,涉及一种可自动除尘的激光雷达装置。
背景技术:
2.检索一件申请号为:cn201821041850.6的实用新型专利,其关于一种可自动除尘的激光雷达,包括激光雷达机体、储水箱和吹风机,激光雷达面板上的灰尘传感器实时检测灰尘传感器附近激光发射器的清洁状况,通过检索发现主要通过控制器连接输水控制阀、喷头和吹风机,实现传统激光雷达不具备的自动除尘功能,大大提高了设备的自动化,确保激光雷达的清洁,从而保证了激光雷达的长久精确稳定工作的目的;
3.经过检索分析后,在进行激光雷达外壳的回城清理时不够彻底,并且清理的灰尘在统一处理时不够便捷等问题,因此,需要重新提供一种可自动除尘的激光雷达装置。
技术实现要素:
4.为了解决上述技术问题,本实用新型提供一种可自动除尘的激光雷达装置,以解决现有自动除尘的激光雷达装置在进行激光雷达外壳的回城清理时不够彻底,并且清理的灰尘在统一处理时不够便捷的技术问题。
5.本实用新型一种可自动除尘的激光雷达装置的目的,由以下具体技术手段所达成:
6.一种可自动除尘的激光雷达装置,包括激光雷达装置,激光雷达装置的顶部转动设置有转座,且转座的顶部固定有收集框,收集框的两侧的中上端均设有侧边进口,同时收集框的顶部两端均设有顶部进口,顶部进口相互远离的一端滑动设置有推块,且推块相互远离一侧的中部均固定有抵杆,收集框两侧的中下端均活动安装有遮挡板,遮挡板的边缘处均固定有延伸板,延伸板相互靠近的一端均固定有连接弹簧,连接弹簧的另一端均固定有移动块,激光雷达装置两侧的下端均固定有固定环,固定环靠近激光雷达装置的一端均贯穿有转杆,转杆上均套接有套杆,套杆的顶部均固定有滑块,同时套杆的下端均固定有挡环,套杆的上端均套接有套环,套环远离激光雷达装置的一侧均活动设置有弹性杆,弹性杆的另一端均固定有弹性球。
7.优选的,激光雷达装置两侧的底部均安装有正反电机,且正反电机与固定杆之间均套接有连接带,并且转杆的下端均是贯穿固定环后贯穿到连接带之间,同时固定环和连接带的内壁均设置有齿块。
8.优选的,转杆与固定环以及连接带接触对应的位于处均设置有与齿块对应的啮合齿,且转杆上套接的套杆顶部是由滑块位于对应的遮挡板底部进行滑动设置,并且转杆的外壁均设置有螺纹,同时套杆的内壁均设置有转杆外壁相互对应的螺纹。
9.优选的,遮挡板均是收集框两侧的侧边进口相互对应,且收集框的内部均为空心设置,并且收集框下端的转座外壁均设置有螺纹,同时转座贯穿对应的激光雷达装置位置
处的内壁上均设置有与其对应的螺纹。
10.优选的,收集框顶部的两端均为倾斜状,且收集框两端的推块上的抵杆的另一端均是与对应的移动块固定,并且推块均是与顶部进口对应,同时移动块的长度与遮挡板的宽度一致,推块的长度与收集框顶部的宽度一致。
11.优选的,弹性杆和弹性球均是橡胶所制,且套环的内壁均设置有螺纹,并且套杆的外壁均设置有套环内壁相互对应的螺纹,同时套环的内径小于挡环的直径。
12.优选的,激光雷达装置底部的两端均固定有支撑杆,且支撑杆的底部均固定有支撑座,同时收集框的后侧安装有密封门。
13.有益效果:
14.1、本实用通过左端的正反电机的反转以及右端的正反电机正转时可带动连动带转动,连动带可带动转杆转动,转杆转动时可与固定环以及连接带内壁对应的齿块作用下达到转杆转动的同时在固定环内移动,且转杆移动转动时可促使套杆逐渐上升并在遮挡板底部移动支撑起遮挡板往上翻动,此时的移动块可拉动连接弹簧在遮挡板上滑动,便可将遮挡板上积的灰均刮附从侧边进口进入到收集框内的作用,从而在遮挡板为激光雷达装置遮挡灰尘的同时达到自动清理灰尘的效果。
15.2、还通过转杆转动带动套杆移动时,可由套杆带动弹性杆以及弹性球进行移动的同时晃动,从在弹性杆晃动时可带动弹性球撞击激光雷达装置的外壳使其外壳上的灰尘均掉落,从而达到进一步清理激光雷装置达外壳的作用。
16.3、其次,在遮挡板往上倾斜翻动时可由滑动的移动块推动抵杆,抵杆便可推动推块,使其推块刮附收集框顶部的灰尘均从顶部进口进入到收集框,使其在自动清理遮挡板上的灰尘时也可进行收集框上灰尘的清理,从而达到轻松有效的清洁。
附图说明
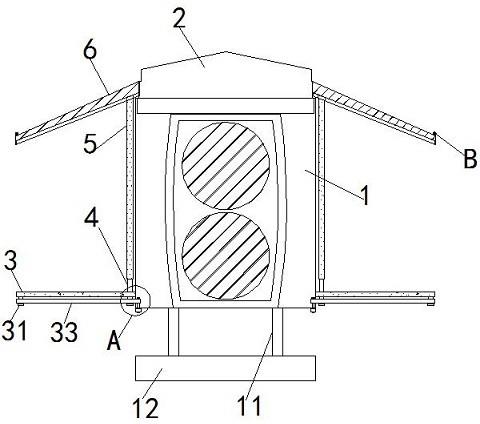
17.图1为本实用新型的激光雷达装置外部结构示意图。
18.图2为本实用新型的转杆与套杆立体结构示意图。
19.图3为本实用新型的收集框顶部立体结构示意图。
20.图4为本实用新型的图1中a处放大结构示意图。
21.图5为本实用新型的图1中b处放大结构示意图。
22.图1-5中,部件名称与附图编号的对应关系为:激光雷达装置-1,支撑杆-11,支撑座-12,收集框-2,侧边进口-21,顶部进口-22,推块-23,抵杆-24,转座-25,固定环-3,固定杆-31,正反电机-32,连动带-33,转杆-4,套杆-5,挡环-51,滑块-52,套环-53,弹性杆-54,弹性球-55,遮挡板-6,延伸板-61,连接弹簧-62,移动块-63。
具体实施方式
23.实施例:如附图1至附图5所示:一种可自动除尘的激光雷达装置,包括激光雷达装置1,激光雷达装置1的顶部转动设置有转座25,且转座25的顶部固定有收集框2,收集框2的两侧的中上端均设有侧边进口21,同时收集框2的顶部两端均设有顶部进口22,顶部进口22相互远离的一端滑动设置有推块23,且推块23相互远离一侧的中部均固定有抵杆24,收集框2两侧的中下端均活动安装有遮挡板6,遮挡板6的边缘处均固定有延伸板61,延伸板61相
互靠近的一端均固定有连接弹簧62,连接弹簧62的另一端均固定有移动块63,激光雷达装置1两侧的下端均固定有固定环3,固定环3靠近激光雷达装置1的一端均贯穿有转杆4,转杆4上均套接有套杆5,套杆5的顶部均固定有滑块52,同时套杆5的下端均固定有挡环51,套杆5的上端均套接有套环53,套环53远离激光雷达装置1的一侧均活动设置有弹性杆54,弹性杆54的另一端均固定有弹性球55,激光雷达装置1两侧的底部均安装有正反电机32,且正反电机32与固定杆31之间均套接有连接带33,并且转杆4的下端均是贯穿固定环31后贯穿到连接带33之间,同时固定环31和连接带33的内壁均设置有齿块,正反电机32的设置使其在清理遮挡板6以及收集框2顶部的灰尘时均更便捷,转杆4与固定环3以及连接带33接触对应的位于处均设置有与齿块对应的啮合齿,且转杆4上套接的套杆5顶部是由滑块52位于对应的遮挡板6底部进行滑动设置,并且转杆4的外壁均设置有螺纹,同时套杆5的内壁均设置有转杆4外壁相互对应的螺纹,转杆4与固定环3上对应的齿块设置使其转杆4转动时可一同在固定环3内移动,且套杆5与转杆4对应的螺纹设置使其转杆4不同方向转动时可带动套杆5逐渐上升的作用,便可有上升的套杆5进行对应的遮挡板6的支撑,使其遮挡板6达到倾斜翻动清理灰尘的效果,遮挡板6均是收集框2两侧的侧边进口21相互对应,且收集框2的内部均为空心设置,并且收集框2下端的转座25外壁均设置有螺纹,同时转座25贯穿对应的激光雷达装置1位置处的内壁上均设置有与其对应的螺纹,转座25的螺纹设置使其可在反方向转动收集框2时便可达到转座脱离激光雷达装置1顶部的作用,同时在顺方向转动收集框2时使其转座25再次安装到激光雷达装置1内,便达到安装和拆卸收集框2的便捷的效果,收集框2顶部的两端均为倾斜状,且收集框2两端的推块23上的抵杆24的另一端均是与对应的移动块63固定,并且推块23均是与顶部进口22对应,同时移动块63的长度与遮挡板6的宽度一致,推块23的长度与收集框2顶部的宽度一致,推块23可推动收集框2顶部的灰尘统一从顶部进口22进入到收集框2,同时移动块63可将遮挡板6上的灰尘推动统一从侧边进口21进入到收集框2内的效果,弹性杆54和弹性球55均是橡胶所制,且套环53的内壁均设置有螺纹,并且套杆5的外壁均设置有套环53内壁相互对应的螺纹,同时套环53的内径小于挡环的直径,弹性杆和弹性球的设置使其在套杆移动时产生晃动,从而带动弹性球54与激光雷达装置1外壳撞击便可将激光雷达装置1外壳上的灰尘击落的作用,同时挡环51的设置可使其套杆53转动下移时遇到挡环51并不在下移的作用,激光雷达装置1底部的两端均固定有支撑杆11,且支撑杆11的底部均固定有支撑座12,同时收集框2的后侧安装有密封门,支撑杆11和支撑座12的设置可使其激光雷达装置1不直接与外部接触,从而保证激光雷达装置1的防潮性。
24.工作原理:首先接通电源使其正反电机32启动,便可在左端的正反电机32的反转以及右端的正反电机32正转的作用下同时带动对应的连动带33转动,连动带33可带动转杆4转动,转杆4转动时可与固定环3以及连接带33内壁对应的齿块作用下达到转杆4转动的同时在固定环3内移动,且转杆4移动转动时可促使套杆5逐渐上升并在遮挡板6底部移动支撑起遮挡板6往上翻动,此时的移动块63可拉动连接弹簧62在遮挡板6上滑动,便可将遮挡板6上积的灰均刮附从侧边进口21进入到收集框2内的作用,从而在遮挡板6为激光雷达装置1遮挡灰尘的同时达到自动清理灰尘的效果,以此同时,在转杆4转动带动套杆5移动时,可由套杆5带动弹性杆54以及弹性球55进行移动的同时晃动,从在弹性杆54晃动时可带动弹性球55撞击激光雷达装置1的外壳使其外壳上的灰尘均掉落,从而达到进一步清理激光雷达
装置1外壳的作用,之后,在遮挡板6往上倾斜翻动时可由滑动的移动块63推动抵杆24,抵杆便可推动推块23,使其推块23刮附收集框2顶部的灰尘均从顶部进口进入到收集框2,使其在自动清理遮挡板6上的灰尘时也可进行收集框2上灰尘的清理,从而达到轻松有效的清洁,最后,可反方向转动收集框2时,便可达到转座25脱离激光雷达装置1顶部的作用,拆卸下来的收集框2可打开前后侧的密封门进行收集框2内部灰尘的清理,使其在清理时更便捷,同时在顺方向转动收集框2时,可使其转座再次安装到激光雷达装置1内,便达到安装和拆卸收集框2的便捷的效果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
