1.本实用新型涉及智能消毒机器人技术领域,具体为一种自动紫外线加喷雾消毒机器人。
背景技术:
2.在各地新冠肺炎频繁复发的情况下,公共区域消毒杀菌已经成为必不可少的项目,目前现有的防疫消杀方式多为人工方式,人工作业方式采用水雾烟雾两用、风送弥雾机或者其他喷雾设备进行作业,但是人工作业方式作业效率低,作业人员需要进入到消杀现场作业,作业人员在高浓度的消毒液的环境中,感染疾病风险较大,一些特定的消杀方式,需要在无人的情况下进行,如紫外消杀,这样就需要在消杀范围内安装紫外灯管,如果消杀范围很大,势必使消杀成本很高,且需要特定人员定期维护。
技术实现要素:
3.本实用新型的目的在于提供一种自动紫外线加喷雾消毒机器人,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:
5.一种自动紫外线加喷雾消毒机器人,包括机体、底盘系统、喷雾升降系统、紫外灯舱门旋转系统和主控系统,所述底盘系统包括机架、底盘壳体、轮毂电机、激光雷达、超声波传感器、防碰撞传感器、防跌落传感器、电池,所述机架对称安装有两个所述轮毂电机,所述轮毂电机与主控系统通过电缆连接,用于控制所述轮毂电机的启动和停止,所述激光雷达安装于机架中部,所述激光雷达与主控系统通过电缆连接,用于通过扫描障碍物信息来构建地图,所述防跌落传感器安装于机架四周,所述防跌落传感器与主控系统通过电缆连接,用于检测路面是否有坑洼、凹陷,所述超声波传感器安装于所述底盘壳体前部,所述超声波传感器与所述主控系统通过电缆连接,用于扫描前方障碍物,所述防碰撞传感器安装于底盘壳体前部下方,所述防碰撞传感器与主控系统通过电缆连接,用于防止发生碰撞,所述电池与主控系统通过电缆连接,用于给所述主控系统提供电能,所述底盘系统安装于所述机体的下部,所述喷雾升降系统包括喷雾模块、升降模块、24瓦紫外灯模块,所述喷雾模块安装于所述升降模块的上部,所述24瓦紫外灯模块安装于所述升降模块的外部,所述紫外灯舱门旋转系统包括骨架顶板、骨架底板、骨架支撑柱、上转盘轴承、下转盘轴承、旋转舱门、弧形齿条、齿轮、步进电机、接近传感器、旋转接近传感器感应片、25瓦紫外灯模块,所述25瓦紫外灯模块安装于所述骨架支撑柱上,所述上转盘轴承的内圈安装于所述骨架顶板上,所述下转盘轴承的内圈安装于所述骨架底板上,所述旋转舱门的上端固定于所述上转盘轴承的外圈上,所述旋转舱门的下端固定于所述下转盘轴承的外圈上,所述弧形齿条安装于所述上转盘轴承的外圈上,所述步进电机安装于所述骨架顶板上,所述齿轮安装于所述步进电机的输出轴上,所述齿轮与所述弧形齿条啮合传动,所述接近传感器安装于所述骨架顶板上,所述旋转接近传感器感应片安装于所述弧形齿条上,所述步进电机与主控系统通
过电缆连接,用于在所述主控系统控制下所述步进电机的启动和停止,所述接近传感器与所述主控系统通过电缆连接,用于所述主控系统检测在所述步进电机带动下所述旋转舱门的开合位置,所述的主控系统包括主控箱体、主控板、4g路由器,所述主控板和所述4g路由器安装于所述主控箱体内,所述主控板与所述4g路由器通过电缆连接,用于所述主控板与服务器之间的通信,通过移动设备终端上的app连接服务器,可以实现远程操控,所述主控板通过电缆连接于所述底盘系统、所述喷雾升降系统、所述紫外灯舱门旋转系统,用于控制所述底盘系统、所述喷雾升降系统、所述紫外灯舱门旋转系统的运行,所述主控系统安装于所述机体的内部,所述主控系统通过电缆连接于所述底盘系统、喷雾升降系统和紫外灯舱门旋转系统,用于控制各个系统的运行。
6.进一步地,所述机体包括触摸显示屏、把手、前外壳体模块、后外壳体模块、上外壳体模块、左外壳体模块、右外壳体模块,所述触摸显示屏安装于所述机体的上部外侧,所述触摸显示屏与所述主控系统通过电缆连接,用于设定消杀参数,显示消杀状态,所述把手安装于所述机体的后部上方,所述前外壳体模块安装于所述机体的前部,所述后外壳体模块安装于所述机体的后部,所述上外壳体模块安装于所述机体的上部,所述左外壳体模块安装于所述机体的左部,所述右外壳体模块安装于所述机体的右部。
7.进一步地,所述前外壳体模块包括前壳、面板、深度相机、深度相机固定板,所述面板安装于所述前壳的前部,所述深度相机安装于所述前壳的中部,所述深度相机与所述主控系统通过电缆连接,用于扫描前方障碍物信息,所述深度相机固定板安装于所述深度相机的后部,用于固定所述深度相机。
8.进一步地,所述左外壳体模块包括左壳、扬声器,所述扬声器安装于所述左壳上,所述扬声器与所述主控系统通过电缆连接,用于播报提示音。
9.进一步地,所述右外壳体模块包括右壳、扬声器、维修门模块,所述扬声器和所述维修门模块安装于所述右壳上,所述扬声器与所述主控系统通过电缆连接,用于播报提示音。
10.进一步地,所述维修门模块包括维修门体、加水口滑动门、滑动门压条。所述滑动门压条安装于所述维修门体上,所述加水口滑动门在所述维修门体和所述滑动门压条之间滑动运行。
11.进一步地,所述上外壳体模块包括上壳、磁吸片、磁铁、急停按钮、启动按钮、刹车释放按钮,所述急停按钮、启动按钮和刹车释放按钮安装于所述上壳上,所述磁吸片安装于所述上壳上方,所述磁铁镶嵌于所述磁吸片和所述上壳内部,所述急停按钮与所述主控系统通过电缆连接,用于紧急情况下,所述主控系统控制停止所有工作,所述启动按钮与所述主控系统通过电缆连接,用于关机状态下,启动主控系统,所述刹车释放按钮与所述主控系统通过电缆连接,用于开机状态下,解除主控系统的刹车状态,可以人工推行,所述磁吸片沿圆周镶嵌所述磁铁6片,在所述上壳相对应的位置同样镶嵌6片所述磁铁,两部件镶嵌所述磁铁的相对面磁极方向相反。
12.进一步地,所述喷雾模块包括雾化池、超声波雾化器、风机、液位传感器、补液泵、风道、储液箱模块、雾气喷头,所述超声波雾化器安装于雾化池内部,所述超声波雾化器与所述主控系统通过电缆连接,用于所述主控系统控制下所述超声波雾化器的启动与停止,所述储液箱模块安装于所述主控系统下部,所述风机通过所述风道与所述雾化池连接,所
述风机与所述主控系统通过电缆连接,用于在所述主控系统控制下将空气送入雾化池内,所述补液泵的进液口与所述储液箱模块通过管路连接,所述补液泵的出液口与所述雾化池通过管路连接,所述储液箱模块用于存放消毒液,所述补液泵还与所述主控系统通过电缆连接,用于所述主控系统控制下将所述储液箱模块内存储的消毒液泵送至所述雾化池,所述液位传感器安装于所述雾化池上部,所述液位传感器与所述主控系统通过电缆连接,用于检测所述雾化池内的消毒液容量,所述雾气喷头安装于所述雾化池的出雾口上,所述雾气喷头的喷口的延伸方向与竖直向下方向呈25
°
夹角,所述雾气喷头的喷口沿圆周排列4个或6个。
13.进一步地,所述的储液箱模块包括储液箱壳体、储液箱液位传感器、加液泵,所述储液箱液位传感器安装于所述储液箱壳体的上部,所述储液箱壳体在所述储液箱液位传感器的安装位置处上部为突起结构,下部为凹陷结构,所述储液箱液位传感器与所述主控系统通过电缆连接,用于检测所述储液箱内消毒液的容量,所述加液泵安装于所述储液箱壳体的上部,所述加液泵的进液口与外部进液口通过管路连接,所述加液泵的出液口与所述储液箱壳体通过管路连接,所述加液泵与所述主控系统通过电缆连接,用于所述主控系统控制下将外部的消毒液泵送至储液箱壳体内。
14.进一步地,所述的直线模组包括基板、前支撑板、后支撑板、电机固定板、直线滑轨、滑块、轴承、滑动块、联轴器、滚珠丝杆、丝杆螺母、伺服电机、接近传感器、接近传感器安装支架、接近传感器感应片,所述轴承分别安装于所述前支撑板和所述后支撑板内,所述前支撑板、后支撑板、直线滑轨、电机固定板分别安装于所述基板上,所述滑块安装于所述直线滑轨上,所述滚珠丝杆安装于所述前支撑板和所述后支撑板的所述轴承的内圈内,所述丝杆螺母安装于所述滚珠丝杆上,所述滑动块安装于所述丝杆螺母上,所述滑动块还固定在所述滑块上,所述伺服电机安装于所述电机固定板上,所述伺服电机与所述滚珠丝杆通过所述联轴器连接,用于传递扭矩,所述伺服电机与所述主控系统通过电缆连接,用于控制所述伺服电机启动和停止,所述接近传感器安装于所述接近传感器安装支架上,所述接近传感器安装支架安装于基板上,所述接近传感器感应片安装于滑动块上,所述接近传感器与所述主控系统通过电缆连接,用于检测所述滑动块的运行位置。
15.进一步地,所述24瓦紫外灯模块包括24瓦紫外灯罩壳体、单端灯座、24瓦紫外灯、灯管抱箍、24瓦驱动器,所述单端灯座、24瓦驱动器和灯管抱箍分别安装于所述24瓦紫外灯罩壳体上,所述24瓦紫外灯安装于所述单端灯座上,所述单端灯座与所述24瓦驱动器通过电缆连接,所述24瓦驱动器与所述主控系统通过电缆连接,用于所述主控系统控制下所述24瓦紫外灯的开启与关闭。
16.进一步地,所述25瓦紫外灯模块包括25瓦紫外灯反光罩壳体、灯座、25瓦驱动器、 25瓦双端紫外灯管,所述灯座和所述25瓦驱动器安装于所述25瓦紫外灯反光罩壳体上,所述25瓦双端紫外灯管安装于所述灯座上,所述25瓦驱动器与所述灯座通过电缆连接,所述 25瓦驱动器与所述主控系统通过电缆连接,用于所述主控系统控制下的所述25瓦双端紫外灯管的开启和关闭。
17.在使用时,通过主控系统分别控制两个轮毂电机的旋转速度和旋转方向,可以使整个底盘系统实现前进和后退及转向等操作,通过主控系统实时采集激光雷达、超声波传感器、防碰撞传感器、防跌落传感器的数据,识别障碍物的位置和形状信息,主控系统实时
调整轮毂电机的控制参数,使在底盘系统带动下机器人避开障碍物,在主控系统的控制下,底盘系统的电池给其他执行单元电能供应,通过主控系统对紫外灯舱门旋转系统的步进电机发送指令,使得步进电机实现转动,在步进电机的带动下安装于步进电机输出轴上的齿轮发生转动,使得与齿轮啮合的弧形齿条发生转动,弧形齿条与上转盘轴承的外圈固定,上转盘轴承的外圈与旋转舱门固定,最终使旋转舱门完成开启或关闭的任务,通过主控系统对紫外灯舱门旋转系统的接近传感器的实时数据采集,可以精确控制旋转舱门开启和关闭的位置,在主控系统对直线模组中的伺服电机的控制,由于伺服电机与滚珠丝杠通过联轴器固定,滚珠丝杠上安装有丝杆螺母,滑动块安装在丝杆螺母上,滑动块与升降柱通过连接块固定,使得安装在升降柱上的24瓦紫外灯模块和安装在升降模块之上的喷雾模块实现上下运动,通过主控系统对直线模组中的接近传感器数据的实时采集,使得主控系统可以对喷雾升降系统上升和下降的位置做精确控制,在主控系统对喷雾模块中的超声波雾化器的控制下,可以实现自动开启雾化功能,主控系统对风机控制可以将超声波雾化器产生的雾气送到雾气喷头,通过主控系统对液位传感器的实时检测,可以实时的控制补液泵对雾化池泵入消毒液,通过主控系统对储液箱液位传感器的实时监测,在储液箱消毒液容量低于下限值得时候,主控系统将报警信息显示到触摸显示屏上,通过移动设备终端上的app告知工作人员需要添加消毒液,在工作人员将消毒液放置在指定得区域,并连接好加液管,点击触摸显示屏上的加液按钮,主控系统自动控制加液泵将消毒液泵入到储液箱壳体中,当主控系统监测到储液箱液位传感器的数值到达上限值,就停止加液工作,当主控系统接收到消杀指令,在主控系统的控制下,机器人自行前往消杀区域,当到达消杀区域,机器人自动开启紫外灯和雾化,执行消杀任务,真正实现消杀区域无人化操作,作业人员无需进入消杀区域作业,感染疾病风险大大降低,由于机器人自主规划路径,可以到达多个消杀区域,这些区域无需安装固定的消杀设备,势必使消杀成本大幅度降低。
附图说明
18.为了更清楚地说明本实用新型的实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍。应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定。对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
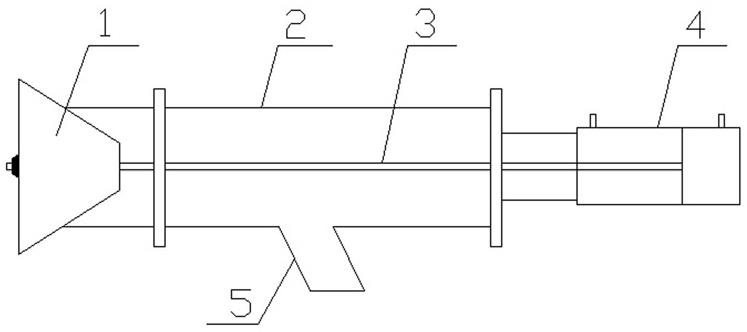
19.图1为本实用新型的实施例提供的自动紫外线加喷雾消毒机器人的结构示意图。
20.图2为本实用新型的实施例提供的底盘系统的结构示意图。
21.图3为本实用新型的实施例提供的机体的结构示意图。
22.图4为本实用新型的实施例提供的前外壳体模块的结构示意图。
23.图5为本实用新型的实施例提供的左外壳体模块的结构示意图。
24.图6为本实用新型的实施例提供的右外壳体模块的结构示意图。
25.图7为本实用新型的实施例提供的维修门模块的结构示意图。
26.图8为本实用新型的实施例提供的上外壳体模块的结构示意图。
27.图9为本实用新型的实施例提供的喷雾升降系统的结构示意图。
28.图10为本实用新型的实施例提供的喷雾模块的结构示意图。
29.图11为本实用新型的实施例提供的储液箱模块的结构示意图。
30.图12为本实用新型的实施例提供的升降模块的结构示意图。
31.图13为本实用新型的实施例提供的直线模组的结构示意图。
32.图14为本实用新型的实施例提供的24瓦紫外灯模块的结构示意图。
33.图15为本实用新型的实施例提供的紫外灯舱门旋转系统的结构示意图。
34.图16为本实用新型的实施例提供的25瓦紫外灯模块的结构示意图。
35.图17为本实用新型的实施例提供的主控系统的结构示意图。
36.图标:100-自动紫外线加喷雾消毒机器人;110-喷雾升降系统;120-机体;130-底盘系统;140-紫外灯舱门旋转系统;150-主控系统;1310-机架;1320-轮毂电机;1330-激光雷达;1340-超声波传感器;1350-防碰撞传感器;1360-防跌落传感器;1370-电池;1380-底盘壳体;1210-上外壳体模块;1220-触摸显示屏;1230-左外壳体模块;1240-前外壳体模块; 1250-把手;1260-后外壳体模块;1270-右外壳体模块;1241-前壳;1242-面板;1243-深度相机;1244-深度相机固定板;1231-左壳;1232-扬声器;1271-右壳;1272-维修门模块; 12721-维修门体;12722-加水口滑动门;12723-滑动门压条;1211-磁吸片;1212-磁铁; 1213-急停按钮;1214-启动按钮;1215-刹车释放按钮;1216-上壳;1110-喷雾模块;1120-24 瓦紫外灯模块;1130-升降模块;1111-储液箱模块;1112-超声波雾化器;1113-风机;1114
‑ꢀ
液位传感器;1115-补液泵;1116-风道;1117-雾化池;1118-雾气喷头;11111-储液箱壳体; 11112-储液箱液位传感器;11113-加液泵;1131-直线模组;1132-伸缩滑轨;1133-安装座; 1134-骨架顶板;1135-骨架底板;1136-骨架支撑柱;1137-连接块;1138-升降柱;1139-收线盒;11301-限位块;11311-滑动块;11312-伺服电机;11313-电机固定板;11314-联轴器; 11315-前支撑板;11316-轴承;11317-丝杆螺母;11318-后支撑板;11319-基板;11310-滚珠丝杠;113101-接近传感器安装支架;113102-磁性接近传感器;113103-滑块;113104-直线滑轨;113105-接近传感器感应片;1121-24瓦紫外灯罩壳体;1122-单端灯座;1123-灯管抱箍;1124-24瓦紫外灯;1125-24瓦驱动器;1401-上转盘轴承;1402-弧形齿条;1403-齿轮; 1404-旋转接近传感器感应片;1405-步进电机;1406-旋转舱门;1407-25瓦紫外灯模块; 1408-下转盘轴承;1409-接近传感器;14071-25瓦紫外灯反光罩壳体;14072-25瓦双端紫外灯管;14073-灯座;14074-25瓦驱动器;1501-主控箱体;1502-4g路由器;1503-主控板.
具体实施方式
37.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
38.因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
39.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“内”、“外”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,或者是本领域技术人员惯常理解的方位或位置关系,仅是为
了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
40.此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
41.在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,“设置”、“连接”等术语应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电缆连接;可以是直接连接,也可以通过中间媒介间接连接,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
42.下面结合附图,对本实用新型的具体实施方式进行详细说明。
43.实施例:
44.请结合图1、图2、图9、图15所示,本实施例提供的自动紫外线加喷雾消毒机器人100,用于室内环境消杀,该自动紫外线加喷雾消毒机器人100能够实现真正的无人化操作,具有高度的智能化,大大降低了作业人员感染疾病的风险。
45.本实用新型实施例提供了一种自动紫外线加喷雾消毒机器人,自动紫外线加喷雾消毒机器人100包括机体120、底盘系统130、喷雾升降系统110、紫外灯舱门旋转系统140 和主控系统150,所述底盘系统130包括机架1310、底盘壳体1380、轮毂电机1320、激光雷达1330、超声波传感器1340、防碰撞传感器1350、防跌落传感器1360、电池1370,所述机架1310对称安装有两个所述轮毂电机1320,所述轮毂电机1320与主控系统150通过电缆连接,用于控制所述轮毂电机1320的启动和停止,所述激光雷达1330安装于机架 1310中部,所述激光雷达1330与主控系统150通过电缆连接,用于通过扫描障碍物信息来构建地图,所述防跌落传感器1360安装于机架1310四周,所述防跌落传感器1360与主控系统150通过电缆连接,用于检测路面是否有坑洼、凹陷,所述超声波传感器1340安装于所述底盘壳体1380前部,所述超声波传感器1340与所述主控系统150通过电缆连接,用于扫描前方障碍物,所述防碰撞传感器1350安装于底盘壳体1380前部下方,所述防碰撞传感器1350与主控系统150通过电缆连接,用于防止发生碰撞,所述电池1370与主控系统150 通过电缆连接,用于给所述主控系统150提供电能,所述底盘系统130安装于所述机体120 的下部,所述喷雾升降系统110包括喷雾模块1110、升降模块1130、24瓦紫外灯模块1120,所述喷雾模块1110安装于所述升降模块1130的上部,所述24瓦紫外灯模块1120安装于所述升降模块1130的外部,所述紫外灯舱门旋转系统140包括骨架顶板1134、骨架底板1135、骨架支撑柱1136、上转盘轴承1401、下转盘轴承1408、旋转舱门1406、弧形齿条1402、齿轮1403、步进电机1405、接近传感器1409、旋转接近传感器感应片1404、25瓦紫外灯模块1407,所述25瓦紫外灯模块1407安装于所述骨架支撑柱上1136,所述上转盘轴承 1401的内圈安装于所述骨架顶板1134上,所述下转盘轴承1408的内圈安装于所述骨架底板1135上,所述旋转舱门1406的上端固定于所述上转盘轴承1401的外圈上,所述旋转舱门1406的下端固定于所述下转盘轴承1408的外圈上,所述弧形齿条1402安装于所述上转盘轴承1401的外圈上,所述步进电机1405安装于所述骨架顶板1134上,所述齿轮1403安装于所述步进电机1405的输出轴上,所述齿轮1403与所述弧形齿条1402啮合传动,所述接近传感器1409安装于所述骨架顶板1134上,所述旋转接近传感器感应片1404安装于所述弧形齿条1402上,所述步进电机1405与主控系统150通过电缆连接,
用于在所述主控系统150控制下所述步进电机1405的启动和停止,所述接近传感器1409与所述主控系统150 通过电缆连接,用于所述主控系统150检测在所述步进电机1405带动下所述旋转舱门1406 的开合位置,所述的主控系统150包括主控箱体1501、主控板1503、4g路由器1502,所述主控板1503和所述4g路由器1502安装于所述主控箱体1501内,所述主控板1503与所述4g路由器1502通过电缆连接,用于所述主控板1503与服务器之间的通信,通过移动设备终端上的app连接服务器,可以实现远程操控,所述主控板1503通过电缆连接于所述底盘系统130、所述喷雾升降系统110、所述紫外灯舱门旋转系统140,用于控制所述底盘系统130、所述喷雾升降系统110、所述紫外灯舱门旋转系统140的运行,所述主控系统150 安装于所述机体120的内部,所述主控系统150通过电缆连接于所述底盘系统130、喷雾升降系统110和紫外灯舱门旋转系统140,用于控制各个系统的运行。
46.在本实施例中,底盘系统130在主控系统150的控制下实现自动紫外线加喷雾消毒机器人100的位置移动,喷雾升降系统110在主控系统150的控制下实现自动紫外线加喷雾消毒机器人100的喷雾消杀任务,紫外灯舱门旋转系统140在主控系统150的控制下实现自动紫外线加喷雾消毒机器人100的紫外线消杀任务,主控系统150通过对轮毂电机1320发送不同的控制指令,可以改变轮毂电机1320的旋转速度和旋转方向,在两个轮毂电机1320 旋转方向和速度不同的情况下,可以实现底盘系统130的转向,在两个轮毂电机1320旋转方向和速度相同的情况下,可以实现底盘系统130的前进和后退,从而达到自动紫外线加喷雾消毒机器人100移动位置的目的,激光雷达1330、超声波传感器1340、防碰撞传感器 1350、防跌落传感器1360将收集到的数据发送给主控系统150,主控系统150对数据进行分析,对障碍物的信息进行判断,并制定出绕开障碍物的最优路径,主控系统150还对激光雷达1330采集到的数据进行整理加工并绘制地图,完成自动构建地图的任务,主控系统 150控制升降模块1130,将喷雾模块1110上移到工作高度,主控系统150控制喷雾模块 1110启动,开始喷雾消杀任务,升降模块1130完成上升任务后,24瓦紫外灯模块1120完全露出,主控系统150控制24瓦紫外灯模块1120开启紫外线消杀任务,主控系统150通过控制步进电机1405的转动,使得步进电机1405输出轴上的齿轮1403转动,齿轮1403带动与其啮合的弧形齿条1402,致使上转盘轴承1401的外圈转动,上转盘轴承1401的外圈转动带动固定在上面的旋转舱门1406转动,下转盘轴承1408对旋转舱门1406的转动起支撑和导向的作用,最终实现旋转舱门1406的打开和关闭,主控系统150通过采集接近传感器 1409采集的数据,实时检测旋转舱门1406是否开启或者关闭到位,主控系统150中主控板 1503将控制信息下发到各个执行系统,执行系统将执行情况反馈回主控板1503,主控板 1503将信息整理通过4g路由器1502发送到服务器,同时主控板1503也通过4g路由器 1502接收服务器传来的控制信息,主控板1503将控制信息下发到各个执行系统,最终使自动紫外线加喷雾消毒机器人100执行消杀任务,通过移动设备终端上的app连接服务器,可以实现远程操控。
47.请结合图3和图9所示,机体120包括触摸显示屏1220、把手1250、前外壳体模块 1240、后外壳体模块1260、上外壳体模块1210、左外壳体模块1230、右外壳体模块1270,触摸显示屏1220安装于机体120的上部外侧,把手1250安装于机体120的后部上方,前外壳体模块1240安装于机体120的前部,后外壳体模块1260安装于机体120的后部,上外壳体模块1210安装于机体120的上部,左外壳体模块1230安装于机体120的左部,右外壳体模块1270安装于机体120的右部。
48.在本实施例中,主控系统150通过触摸显示屏1220显示自动紫外线加喷雾消毒机器人100的运行状态及报警信息,也用于用户设置消杀参数及查看自动紫外线加喷雾消毒机器人100的信息,起到人机交互的作用。
49.请结合图4和图9所示,前外壳体模块1240包括前壳1241、面板1242、深度相机 1243、深度相机固定板1244,面板1242安装于前壳1241的前部,深度相机1243安装于前壳1241的中部,深度相机固定板1244安装于深度相机1243的后部。
50.在本实施例中,深度相机1243将采集到的数据发送给主控系统150,主控系统150 对数据进行分析,对障碍物的信息进行判断,并制定出绕开障碍物的最优路径。
51.请结合图5和图9所示,左外壳体模块1230包括左壳1231、扬声器1232,扬声器 1232安装于左壳1231上。
52.在本实施例中,主控系统150将控制扬声器1232播报提示信息、故障信息,达到语音播报的目的。
53.请结合图6和图9所示,右外壳体模块1270包括右壳1271、扬声器1232、维修门模块1272,扬声器1232和维修门模块1272安装于右壳1271上。
54.在本实施例中,主控系统150将控制扬声器1232播报提示信息、故障信息,达到语音播报的目的,在自动紫外线加喷雾消毒机器人100出现硬件故障时候,只需将维修门模块 1272拆掉,就可以现场维修,起到方便维修和维护的目的。
55.请结合图7所示,维修门模块1272包括维修门体12721、加水口滑动门12722、滑动门压条12723,滑动门压条12723安装于维修门体12721上。
56.在本实施例中,加水口滑动门12722在滑动门压条12723和维修门体12721之间形成的卡槽内滑动,加水口滑动门12722顶部设置有卡扣,维修门体12721设置有卡扣位,当加水口滑动门12722滑动到开启位置后,加水口滑动门12722的卡扣落入维修门体12721的卡扣位,加水口滑动门12722停留在开启位置,当需要关闭时,用力将加水口滑动门12722 向下拉动,使12722的卡扣脱离维修门体12721的卡扣位,加水口滑动门12722依靠自身的重力落下,达到关闭的目的。
57.请结合图2、图8和图9所示,上外壳体模块1210包括上壳1216、磁吸片1211、磁铁1212、急停按钮1213、启动按钮1214、刹车释放按钮1215,急停按钮1213、启动按钮 1214和刹车释放按钮1215安装于上壳1216上,磁吸片1211安装于上壳1216上方,磁铁 1212镶嵌于磁吸片1211和上壳1216上。
58.在本实施例中,当有紧急情况发生时,按下急停按钮1213,主控系统150将停止一切自动紫外线加喷雾消毒机器人100的工作,以避免危险发生,当自动紫外线加喷雾消毒机器人100处于关机状态,按下启动按钮1214可以启动主控系统150,当自动紫外线加喷雾消毒机器人100处于待机状态,需要人工推行时,按下刹车释放按钮1215,主控系统150 将解除刹车状态。
59.在本实施例中,由于上壳1216存在许多安装孔位,为了美观特别增加磁吸片1211,磁吸片1211沿圆周方向均匀镶嵌6片磁铁1212,在上壳1216与磁吸片1211镶嵌磁铁1212 的相对位置同样镶嵌有6片磁铁1212,不同的是上壳1216与磁吸片1211镶嵌磁铁1212的相对面磁极极性相反,当磁吸片放入相应位置时,相对面极性相反的磁铁吸到一起,以实现磁吸片固定的目的。
60.请结合图10和图9所示,喷雾模块1110包括雾化池1117、超声波雾化器1112、风机1113、液位传感器1114、补液泵1115、风道1116、储液箱模块1111、雾气喷头1118,超声波雾化器1112安装于雾化池1117内部,储液箱模块1111安装于主控系统150的下部,风机1113通过风道1116与雾化池1117连接,补液泵1115的进液口与储液箱模块1111通过管路连接,补液泵1115的出液口与雾化池1117通过管路连接,液位传感器1114安装于雾化池1117上部,雾气喷头1118安装于雾化池1117的出雾口上,雾器喷头1118的喷口的延伸方向与竖直向下方向呈25
°
夹角。
61.在本实施例中,主控系统150采集液位传感器1114数据,当液位传感器1114到达下限值时,主控系统150控制补液泵1115启动,将消毒液从储液箱模块1111泵入到雾化池 1117中,当液位到达设定高度,主控系统150控制补液泵1115停机,起到自动控制液位的目的,主控系统150控制风机1113启动,主控系统150控制超声波雾化器1112启动,开始喷雾消杀任务。
62.请结合图3、图9和图11所示,储液箱模块1111包括储液箱壳体11111、储液箱液位传感器11112、加液泵11113,储液箱液位传感器11112安装于储液箱壳体11111的上部,储液箱壳体11111在储液箱液位传感器11112的安装位置处上部为突起结构,下部为凹陷结构,加液泵11113安装于储液箱壳体11111的上部,加液泵11113的进液口与外部加液口通过管路连接,所述加液泵11113的出液口与所述储液箱壳体11111通过管路连接。
63.在本实施例中,主控系统150采集储液箱液位传感器11112数据,当储液箱液位传感器11112处于下限报警时,主控系统150将缺液报警显示到触摸显示屏1220上,主控系统 150将控制自动紫外线加喷雾消毒机器人100返回加液位置,当工作人员将加液泵11113的进液口与外部加液口通过管路连接起来,点击触摸显示屏1220上的加液键,主控系统150 将控制加液泵11113启动,将外部消毒液泵入到储液箱壳体11111中,当主控系统150采集到储液箱液位传感器11112处于上限位时,主控系统150控制加液泵11113停止工作。
64.请结合图9和图12所示,升降模块1130包括直线模组1131、伸缩滑轨1132、安装座1133、骨架顶板1134、骨架底板1135、骨架支撑柱1136、连接块1137、升降柱1138、滑动块11311、收线盒1139、限位块11301,伸缩滑轨1132的第一端安装于安装座1133上,伸缩滑轨1132的第二端安装于升降柱1138上,安装座1133安装于骨架底板1135上,直线模组1131安装于骨架支撑柱1136上,滑动块11311与升降柱1138通过连接块1137固定,收线盒1139安装于安装座1133上,限位块11301安装于骨架顶板1134上。
65.在本实施例中,在主控系统150控制下直线模组1131的滑动块11311实现上下精确移动,并带动升降柱1138上下运动,最终是安装在升降柱1138上的部件上下运动,伸缩滑轨1132在上下运动中给予支撑和导向的作用,收线盒1139用于主控系统150和升降模块 1130所有的电缆连接,起到上下运动时,跟随线缆收放的作用。
66.请结合图9和图13所示,直线模组1131包括基板11319、前支撑板11315、后支撑板11318、电机固定板11313、直线滑轨113104、滑块113103、轴承11316、滑动块11311、联轴器11314、滚珠丝杠11310、丝杆螺母11317、伺服电机11312、磁性接近传感器113102、接近传感器安装支架113101、接近传感器感应片113105,轴承11316分别安装于前支撑板 11315和后支撑板11318内,前支撑板11315、后支撑板11318、直线滑轨113104、电机固定板11313分别安装于基板11319上,滑块113103安装于直线滑轨113104上,由于滑块 113103与直线滑轨
113104之间有滚珠和限位结构,使滑块113103保持在沿直线滑轨 113104方向顺畅滑动不脱轨,滚珠丝杠11310安装于前支撑板11315和后支撑板11318的轴承11316的内圈内,丝杆螺母11317安装于滚珠丝杠11310上,滑动块11311安装于丝杆螺母11317上,滑动块11311还固定在滑块113103上,伺服电机11312安装于电机固定板11313上,伺服电机11312与滚珠丝杠11310通过联轴器11314连接,用于传递扭矩,磁性接近传感器113102安装于接近传感器安装支架113101上,接近传感器安装支架113101安装于基板11319上,接近传感器感应片113105安装于滑动块11311上。
67.在本实施例中,在主控系统150控制伺服电机11312转动,伺服电机11312通过联轴器11314传递扭矩到滚珠丝杠11310上,由于滚珠丝杠11310与丝杆螺母11317之间采用螺旋配合,滑动块11311安装于丝杆螺母11317上,滑动块11311还固定在滑块113103上,使丝杆螺母11317不能随滚珠丝杠11310转动,只能沿直线滑轨113104方向运动,最终导致滑动块11311沿直线滑轨113104运动,磁性接近传感器113102安装于滑动块11311的起始位置和终点位置,主控系统150通过采集磁性接近传感器113102数据,实时判断滑动块是否运动到位。
68.请结合图9和图14所示,24瓦紫外灯模块1120包括24瓦紫外灯罩壳体1121、单端灯座1122、24瓦紫外灯1124、灯管抱箍1123、24瓦驱动器1125,单端灯座1122、24瓦驱动器1125和灯管抱箍1123安装于24瓦紫外灯罩壳体1121上,24瓦紫外灯1124安装于单端灯座1122上。
69.在本实施例中,单端灯座1122与24瓦驱动器1125的输出端通过电缆连接,主控系统150通过控制24瓦驱动器1125,来启动和停止24瓦紫外灯1124,达到执行上层紫外线消杀任务的目的,灯管抱箍1123用于限制24瓦紫外灯1124的晃动。
70.请结合图9和图16所示,25瓦紫外灯模块1407包括25瓦紫外灯反光罩壳体14071、灯座14073、25瓦驱动器14074、25瓦双端紫外灯管14072,灯座14073和25瓦驱动器 14074安装于25瓦紫外灯反光罩壳体14071上,25瓦双端紫外灯管14072安装于灯座 14073上,25瓦驱动器14074与灯座14073通过电缆连接。
71.在本实施例中,主控系统150通过控制25瓦驱动器14074,来开启和关闭25瓦双端紫外灯管14072的目的,达到执行紫外线消杀任务的目的。
72.本实施例提供了一种自动紫外线加喷雾消毒机器人,针对环境消杀主要以飞沫、气溶胶、接触传播的特点,所述自动紫外线加喷雾消毒机器人有含消毒剂喷雾消毒、紫外线消毒、喷雾加紫外线三种消毒方式可供选择,将紫外线照射的物理方法和含消毒剂喷雾方法相结合的全方位消毒,既能够有效杀灭室内空气中悬浮的病毒,也可以杀灭物体表面的病毒,消毒效果显著,方式灵活,适用多种场景,具有高效、便捷、智能、安全、可靠的优势。同时,自动紫外线加喷雾消毒机器人可以自主规划路径,具有智能移动消毒,自动避障功能,适用室内环境下的消杀任务,实现室内消毒工作的智能化,节省了人力、物力成本的消耗,通过移动设备终端上的app进行远程操控,可以大大减少作业人员的直接接触,有效降低了作业人员感染疾病的风险。可见,自动紫外线加喷雾消毒机器人能够阻断病毒的传播风险,对于疫情防控,保障生命健康安全具有重大意义。
73.另外,以上对本实用新型实施例所提供的一种自动紫外线加喷雾消毒机器人进行了详细介绍,本文中应采用了具体个例对本实用新型的原理及实施方式进行了阐述,以上
实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本实用新型的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。