1.本实用新型涉及厕所自动清洁领域,尤其涉及的是一种用于自动清洁机器人的高压冲水装置。
背景技术:
2.现有的写字楼,办公楼等高层楼宇需要清洁工定期定时对厕所进行清理。为节约人力资源,节省人力成本,有很多地方采用自动清洁机器人代替人工对厕所进行清洁维护。
3.但是现有的冲洗机器人是将整个冲水系统随身携带,这样导致整个冲洗机器人的体积大,机器人本体带有冲洗水,导致整个机器人很笨重,其移动过程中所消耗的电力非常大,在电池容量一定的情况下,电力浪费严重,导致整个机器人运行时间不长,效率低。
4.因此,现有技术还有待于改进和发展。
技术实现要素:
5.鉴于上述现有技术的不足,本实用新型的目的在于提供一种用于自动清洁机器人的高压冲水装置,解决现有的冲洗机器人将整个冲水系统随身携带,导致整个机器人很笨重而移动过程中所消耗的电力非常大的问题。
6.本实用新型的技术方案如下:
7.一种用于自动清洁机器人的高压冲水装置,用于设置在天花板,包括架体;
8.高压供水组件,所述高压供水组件设置在所述架体上;
9.输出管,所述输出管连接在所述高压供水组件上;
10.喷头,所述喷头连接在所述输出管上;
11.伸缩组件,所述伸缩组件连接所述架体,并伸出于所述架体外或收缩于所述架体内;
12.所述喷头可分离连接于所述伸缩组件上。
13.进一步,所述架体上还设置有收放卷组件,所述输出管缠绕在所述收放卷组件上。
14.进一步,所述伸缩组件包括:
15.多个伸缩部,多个伸缩部依次连接,并用于形成多级伸缩;
16.连接部,所述连接部设置在多个伸缩部中远离所述架体的伸缩部上,所述喷头可分离连接在所述连接部。
17.进一步,所述连接部包括:
18.连接支架,所述连接支架连接在所述伸缩部上;
19.夹子,所述夹子连接在所述连接支架上,并用于夹持所述喷头;
20.感应开关,所述感应开关设置在所述夹子上,并用于检测所述喷头是否连接到所述夹子上。
21.进一步,所述高压供水组件包括:
22.高压水箱,所述高压水箱设置在所述架体上;
23.高压水泵,所述高压水泵的输入端连接所述高压水箱,输出端连通所述输出管。
24.进一步,所述架体上还设置有消毒组件,所述消毒组件包括:
25.消毒液箱,所述消毒液箱设置在所述架体上;以及
26.消毒水泵,所述消毒水泵的输入端连通所述消毒液箱,输出端连接所述输出管。
27.进一步,所述架体上还设置有清新空气组件,所述清新空气组件包括:
28.清新剂箱,所述清新剂箱设置在所述架体上;以及
29.清新剂输出泵,所述清新剂输出泵的输入端连通所述清新剂箱,输出端连接所述输出管。
30.进一步,所述输出管的输入端连接有多通接头,所述高压水泵、消毒水泵以及清新剂输出泵分别连接在所述多通接头上;
31.所述高压水泵与所述多通接头的连接管道上设置有第一电磁阀门,所述消毒水泵与所述多通接头的连接管道上设置有第二电磁阀门,所述清新剂输出泵与所述多通接头的连接管道上设置有第三电磁阀门。
32.进一步,所述高压冲水装置还包括吸水组件,所述吸水组件包括:存水箱,所述存水箱设置在所述架体上,
33.负压泵,所述负压泵连接所述存水箱;
34.吸水管,所述吸水管与所述输出管并行设置;
35.吸水头,所述吸水头连接所述喷头。
36.进一步,所述架体上连接有驱动机构,所述驱动机构用于驱动所述架体沿x方向或/和y方向运动。
37.有益效果,本方案提出一种用于自动清洁机器人的高压冲水装置,通过上述方案,将架体单独设置,并在架体上设置高压供水组件,使机器人冲洗的部分能独立出来,通过输出管连接喷头和高压供水组件,从而可以使喷头能喷出高压水对厕所和厕所内的马桶进行冲水,将马桶上的污垢能通过高压水冲洗干净,保证如厕后的马桶清洁,便于下一位使用者的使用。当自动清洁机器人需要对马桶进行冲洗时,所述架体上设置伸缩组件带动喷头伸出,再由自动清洁机器人夹持喷头,通过自动清洁机器人带动喷头调整冲洗角度,从而对马桶进行冲洗。当马桶冲洗完成后,自动清洁机器人将喷头放置到伸缩组件上,通过伸缩组件带动喷头收回到架体上或者移动到不干涉使用者的位置,从而完成冲洗过程。这样将架体以及高压供水组件单独设置,减轻了自动清洁机器人自身的重量,减小了自动清洁机器人的体积,从而减小了自动清洁机器人移动时的耗电量,增加了自动清洁机器人的运行时间,增加了效率。
附图说明
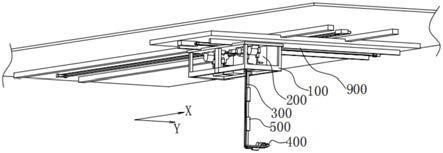
38.图1为本实用新型的一种用于自动清洁机器人的高压冲水装置的结构示意图。
39.图2为本实用新型一种用于自动清洁机器人的高压冲水装置的另一视角的结构示意图。
40.图3为本实用新型一种用于自动清洁机器人的高压冲水装置的主要部分的结构示意图。
41.图4为本实用新型一种用于自动清洁机器人的高压冲水装置的主要部分的仰视视
角的结构示意图。
42.图5为本实用新型一种用于自动清洁机器人的高压冲水装置的主要部分的另一视角的结构示意图。
43.图中各标号,100、架体;110、收放卷组件;200、高压供水组件;210、高压水箱;220、高压水泵;300、输出管;310、多通接头;320、第一电磁阀门;330、第二电磁阀门;340、第三电磁阀门;400、喷头;410、把手;500、伸缩组件;510、伸缩部;520、连接部;521、连接支架;522、夹子;600、消毒组件;610、消毒液箱;620、消毒水泵;700、清新空气组件;710、清新剂箱;720、清新剂输出泵;800、吸水组件;810、存水箱;820、负压泵;830、吸水头;840、吸水管;900、驱动机构;910、第一带轮传动机构;920、第二带轮传动机构。
具体实施方式
44.本实用新型提供了一种用于自动清洁机器人的高压冲水装置,为使本实用新型的目的、技术方案及效果更加清楚、明确,以下参照附图并举实例对本实用新型进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
45.现有用于厕所的自动清洁机器人通过刷子、抹布、拖布进行清洁,需要人工更换抹布,操作麻烦成本较高。而采用高压水代替传统的清洁机器人,可以不用对刷子、抹布等耗材进行更换,而且冲洗效率高,可在两个上厕所的人的间隔时间段内进行清洗,效率高,不会对下一个上厕所的人带来过多的等待时间。但是现有的自动清洁机器人都是自带冲洗系统,带着冲洗系统进行移动,这样就整个机器人很笨重而移动过程中所消耗的电力非常大,电池容量一定的情况下,工作时间有限,实用性不强,制约了自动清洁机器人的发展。
46.因此,如图1、图2所示,本实施例提出一种用于自动清洁机器人的高压冲水装置,用于自动清洁机器人,包括架体100,高压供水组件200,输出管300,喷头400,以及伸缩组件500。所述架体100可以活动设置在厕所的天花板上,或固定设置在厕所天花板。而自动清洁机器人则在厕所底面移动,可移动到不同的厕所区间内,对每个区间进行单独清洗。所述高压供水组件200设置在所述架体100内,这样高压供水组件200就被单独设置在厕所天花位置,使高压供水组件200从自动清洁机器人上独立出来。所述输出管300连接在所述高压供水组件200上,所述喷头400连接在所述输出管300上,高压水通过输出管300输出到喷头400,从而可以对厕所内马桶进行高压冲洗。所述伸缩组件500连接所述架体100,并伸出于所述架体100外或收缩于所述架体100内,所述喷头400可分离连接于所述伸缩组件500上。输出管300为软管,使输出管300能弯曲,伸出或收卷等。
47.当自动清洁机器人需要对马桶进行冲洗时,所述架体100内设置伸缩组件500带动喷头400伸出,再由自动清洁机器人(图示中未画出)夹持喷头400,通过自动清洁机器人带动喷头400调整冲洗角度,从而对马桶进行冲洗。当马桶冲洗完成后,自动清洁机器人将喷头400放置到伸缩组件500上,通过伸缩组件500带动喷头400收回到架体100内或者移动到不干涉使用者的位置,从而完成冲洗过程。这样将架体100以及高压供水组件200单独设置,减轻了自动清洁机器人自身的重量,减小了自动清洁机器人的体积,从而减小了自动清洁机器人移动时的耗电量,增加了自动清洁机器人的运行时间,增加了效率。
48.如图2、图4所示,本实施例中的所述高压供水组件200具体包括:高压水箱210,以
及高压水泵220。所述高压水箱210设置在所述架体100内,所述高压水泵220的输入端连接所述高压水箱210,输出端连通所述输出管300。这样使高压水箱210和高压水泵220与自动清洁机器人脱离,从而减轻自动清洁机器人的体积与重量。另外通过高压水箱210进行供水,再通过高压水泵220加压后将水输出,能实现对马桶包面的高压冲洗,从而清除上一使用者的使用痕迹,使下一个使用者更放心的使用马桶。本实施例中的高压冲洗的压力是5-8mpa,该压力就能对马桶的清洗效果好,清洗效率高。
49.如图2、图4所示,本实施例的具体结构中,所述架体100内还设置有收放卷组件110,所述输出管300缠绕在所述收放卷组件110上。所述收放卷组件110具体可采用水管自动收缩卷盘,水管自动收缩卷盘的工作原理:输入端外一段水管接水源(不具自动伸缩功能),输出端水管可来回伸缩。另外可以带自锁装置,水管自动伸缩卷管器内有自动排线功能,拉出一段水管后,自锁装置起作用(水管停止不动),如想水管缩回,需再向外拉出一段,水管迈过自锁装置后松开水管,水管回缩。固定后卷轴可水平可180度摆动。因此,输出管300通过安装在水管自动收缩卷盘上,使输出管300的输入端不动,而输出管300的输出端可自动收放而不会导致输出管300的输出端过长或过短。所述输出管300的输出端连接喷头400,具体为当伸缩组件500带动喷头400伸出时,所述输出管300被喷头400带着从收放卷组件110上拉出;而当伸缩组件500带动喷头400收回时,所述输出管300被收放卷组件110拉回,这样输出管300可以随伸缩组件500进行收放。
50.如图2、图4、图5所示,本实施例中的所述伸缩组件500包括:多个伸缩部510,以及连接部520。多个伸缩部510依次连接,并用于形成多级伸缩,所述连接部520设置在多个伸缩部510中远离所述架体100的伸缩部510上,所述喷头400可分离连接在所述连接部520。具体结构中,所述伸缩部510可以采用滚珠丝杠传动结构,例如在丝杆的活动台上设置长条支撑板,在长条支撑板的下端上设置另外的伸缩部510,这样就实现多个伸缩部510的拼接,使多个伸缩部510可以依次伸出。另外的伸缩部510结构中,还可以采用电动推杆,多个电动推杆依次连接,这样可以实现逐级伸出或收回。所述伸缩部510结构还可以采用同步带驱动的形式,多级同步带传动结构中将下一个同步带传动结构连接在上一个同步带的输出端,这样也可以实现逐级伸出或收回。
51.如图3、图5所示,本实施中的所述连接部520包括:连接支架521,夹子522,以及感应开关(图示中未画出)。所述连接支架521通过螺钉连接在所述伸缩部510的下端,且所述连接支架521为y形支架。本实施例中的伸缩组件500沿上下方向进行伸缩,所述连接支架521沿水平方向设置。所述夹子522设置有两个,两个夹子522通过螺钉连接在连接支架521的左右两侧上,并用于夹持所述喷头400。所述喷头400的左右两侧相应的设置有把手410,左右两侧的把手410可卡嵌在左右两侧的夹子522内。本实施例中的夹子522为弹簧夹,弹簧夹背离所述连接支架521的一侧开设为开口,在弹簧夹夹紧的状态下,开口也张开一定的角度。这样当自动清洁机器人将喷头400向后送入到连接部520时,将两侧把手410送入到开口处,然后再顶开开口,将把手放入到夹子522后,开口收拢。所述感应开关设置在所述夹子522上,感应开关连接控制模块,并用于检测所述喷头400是否连接到所述夹子522上。例如当检测到喷头400脱离夹子522后,控制模块可以控制伸缩组件500上升一段距离或收回,从而不会对自动清洗机器人的移动造成干涉。而当清洗完成后,控制模块再控制伸缩组件500下降,通过自动清洗机器人的移动,将喷头400放置到夹子522内,喷头400到位后,被感应开
关所感应,这样再控制伸缩组件500带着喷头400上升。完成高压冲洗过程。
52.如图3、图5所示,除了对厕所进行高压冲洗后,本实施例中的所述架体100内还设置有消毒组件600,所述消毒组件600包括:消毒液箱610,消毒水泵620。所述消毒液箱610设置在所述架体100内。所述消毒水泵620的输入端连通所述消毒液箱610,输出端连接所述输出管300。这样当冲洗完成后,为进一步保证厕所的清洁、卫生,且不对下一位使用者造成影响。消毒水泵620启动,将消毒液箱610内的消毒液抽出并通过输出管300输送到喷头400,经过喷头400喷出,从而对冲洗后的厕所进行消毒。
53.另外,如图3、图5所示,所述架体100内还设置有清新空气组件700,所述清新空气组件700包括:清新剂箱710,以及清新剂输出泵720。所述清新剂箱710设置在所述架体100内,所述清新剂输出泵720的输入端连通所述清新剂箱710,输出端连接所述输出管300。当上述厕所的消毒过程完成后,还需要对厕所内的异味进行清除,从而使下一位使用者具有更好的使用体验。因此,清新剂输出泵720启动,将清新剂箱710内的清新剂抽出并通过输出管300输送到喷头400,经过喷头400喷出,从而对冲洗后的厕所进行空气清新过程。
54.如图3、图4所示,为方便各管道的连接,所述输出管300的输入端连接有多通接头310,所述高压水泵220、消毒水泵620以及清新剂输出泵720分别连接在所述多通接头310上。所述高压水泵220与所述多通接头310的连接管道上设置有第一电磁阀门320,所述消毒水泵620与所述多通接头310的连接管道上设置有第二电磁阀门330,所述清新剂输出泵720与所述多通接头310的连接管道上设置有第三电磁阀门340。当高压水泵220启动后,第一电磁阀门320打开,而第二电磁阀门330和第三电磁阀门340关闭,这样通过高压水泵220将清洗水从输出管300输出,从而实现对厕所的高压冲洗过程。当消毒水泵620启动后,第二电磁阀门330打开,而第一电磁阀门320和第三电磁阀门340关闭,这样通过消毒水泵620将消毒液从输出管300输出,从而实现对厕所的消毒过程。当清新剂输出泵720启动后,第三电磁阀门340打开,而第二电磁阀门330和第一电磁阀门320关闭,这样通过清新剂输出泵720将清洗水从输出管300输出,从而实现对厕所的空气清新过程。另外,可以将第一电磁阀门320和第二电磁阀门330同时打开,这样实现高压冲洗和消毒过程同时工作,提高工作效率。
55.另外,如图3、图4所示,所述高压冲水装置还包括吸水组件800,当对厕所进行冲洗后,需要将水吸干,因此,设置吸水组件800进行吸水。所述吸水组件800包括:存水箱810,负压泵820,吸水管840,以及吸水头830。所述存水箱810设置在所述架体100内,所述负压泵820连接所述存水箱810,所述吸水管840与所述输出管300并行设置,所述吸水头830连接所述喷头400。当高压冲水完成后,需要将多余的水吸干,这样通吸水组件800将水吸到存水箱810中,从而是厕所干净。存水箱810中的水可以经过过滤等净化处理,能送入到高压水箱210中,这样可以充分利用水资源,节能环保。
56.易于想到,还可对已冲洗的马桶进行风干,或烘干。例如增加高压出风装置,并在该装置上设置加热丝,就可以形成热风,加快马桶表面干燥过程。
57.如图1、图2所示,本实施例中的所述架体100上连接有驱动机构900,所述驱动机构900用于驱动所述架体100沿x方向或/和y方向运动。通常厕所中设置有一排厕所位,或相对的两排厕所位,这样就需要整个高压冲水装置能进行移动,将架体100移动到各个厕所位的上方,因此设置驱动机构900来带动架体100进行移动。本实施例中以驱动结构设置在长方形厕所天花板为例,长方形厕所天花板的长度方向为x方向,宽度方向为y方向。驱动机构
900设置在的驱动机构900采用两个带轮传动机构,其中第一带轮传动机构910沿x方向设置,第二带轮传动结构沿y方向设置在第一带轮传动机构910上。这样整个架体100和第二带轮传动结构被第一带轮传动机构910所驱动而沿x方向移动,而架体100被第二带轮传动机构920所驱动而沿x方向移动。从而实现了架体100在x方向的移动和y方向的移动,使喷头400能位于不同的厕所区间。这样自动清洁机器人只需要移动到相应的厕所区间,再连接到喷头400就能实现对各个区间的清洁。大大提高了清洁效率。
58.综上所述,本方案提出一种用于自动清洁机器人的高压冲水装置,通过上述方案,将架体100单独设置,并在架体100内设置高压供水组件200,使机器人冲洗的部分能独立出来,通过输出管300连接喷头400和高压供水组件200,从而可以使喷头400能喷出高压水对厕所和厕所内的马桶进行冲水,将马桶上的污垢能通过高压水冲洗干净,保证如厕后的马桶清洁,便于下一位使用者的使用。当自动清洁机器人需要对马桶进行冲洗时,所述架体100内设置伸缩组件500带动喷头400伸出,再由自动清洁机器人夹持喷头400,通过自动清洁机器人带动喷头400调整冲洗角度,从而对马桶进行冲洗。当马桶冲洗完成后,自动清洁机器人将喷头400放置到伸缩组件500上,通过伸缩组件500带动喷头400收回到架体100内或者移动到不干涉使用者的位置,从而完成冲洗过程。这样将架体100以及高压供水组件200单独设置,减轻了自动清洁机器人自身的重量,减小了自动清洁机器人的体积,从而减小了自动清洁机器人移动时的耗电量,增加了自动清洁机器人的运行时间,增加了效率。
59.应当理解的是,本实用新型的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本实用新型所附权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。