1.本发明涉及一种对大蒜、洋葱、香葱等鳞茎蔬菜进行收割的鳞茎蔬菜收割机。
背景技术:
2.专利文献1中公开了:将在土埂面呈列状栽植的洋葱等拔出而收割的收割机。另外,专利文献2中公开了:具备多个拔出输送装置以便能够对多垄鳞茎蔬菜进行收割。
3.现有技术文献
4.专利文献
5.专利文献1:日本特许第3184788号公报
6.专利文献2:日本特开2016-36278号公报
技术实现要素:
7.关于专利文献1的收割机,对挖掘的收割物进行输送并使之向下掉落到土埂面,不具备对收割物进行回收的回收部。另外,关于专利文献2的收割机,拔出输送装置将鳞茎蔬菜拔出并输送到集装箱,所以,是拔出输送装置从行驶机体的前下端朝向行驶机体的后上方配置的布局。因而,收割机的总高度增大,其结果,存在收割机整体变大且机体平衡变差的问题。
8.本技术的目的在于提供一种能够使整体变得紧凑的鳞茎蔬菜收割机。
9.本技术的鳞茎蔬菜收割机具备:行驶机体;拔出输送装置,其将栽植于田地中的鳞茎蔬菜拔出,并一边夹持茎叶部一边向后上方输送;以及输送机,其从所述拔出输送装置接受所述鳞茎蔬菜且将其向后上方输送而进行回收,所述拔出输送装置配置于所述输送机的前方。
10.根据上述结构,将鳞茎蔬菜拔出并进行输送的拔出输送装置、与从拔出输送装置接受鳞茎蔬菜并对其进行输送和回收的输送机前后并排配置,所以,与拔出输送装置将鳞茎蔬菜拔出并将其输送回收至集装箱的结构相比,能够降低鳞茎蔬菜收割机的总高度,能够使整体变得紧凑。
附图说明
11.图1是表示本实施方式的鳞茎蔬菜收割机的整体结构的立体图。
12.图2是图1所示的鳞茎蔬菜收割机的左视图。
13.图3是表示拔出输送装置、肩部对齐装置以及茎叶切断装置的立体图。
14.图4是表示拔出输送装置、输送机以及收割部框架的立体图。
15.图5是表示输送机、料斗以及集装箱载置台的立体图。
16.图6是用于对连杆机构进行说明的图。
17.图7a是表示使收割部下降后的状态的图。
18.图7b是表示使收割部上升后的状态的图。
19.图8是表示另一实施方式所涉及的鳞茎蔬菜收割机的立体图。
20.图9a是表示另一实施方式所涉及的收割部的升降机构的图,且是表示使得收割部下降后的状态的图。
21.图9b是表示利用另一收割机构使收割部上升后的状态的图。
具体实施方式
22.以下,参照附图对本技术的实施方式进行说明。此外,在以下说明中,将朝向鳞茎蔬菜收割机1的行进方向时的左侧简称为左侧,将同样朝向行进方向时的右侧简称为右侧。
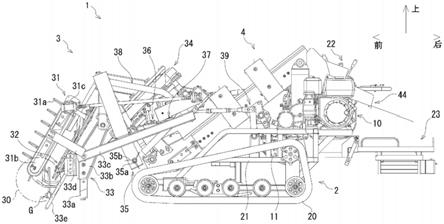
23.首先,参照图1~图6对鳞茎蔬菜收割机1的概略构造进行说明。鳞茎蔬菜收割机1对栽植于土埂上或无土埂田地中的多垄鳞茎蔬菜进行收割。在本实施方式中,对用于收割栽植了4垄的大蒜g的鳞茎蔬菜收割机1进行说明。此外,作为鳞茎蔬菜,除了大蒜以外,还能够举出洋葱、香葱等。
24.在本实施方式中,大蒜g具有球部ga和茎叶部gb。
25.鳞茎蔬菜收割机1在能够自主行驶的行驶机体2具备从栽培有大蒜g的土埂将大蒜g挖掘出而收割的收割部3。另外,鳞茎蔬菜收割机1具备:对由收割部3收割的大蒜g进行输送并回收的输送机4。
26.行驶机体2具备:机体框架21,其形成为立体框状;以及一对行驶履带20、20,它们配置于机体框架21的两侧。在行驶机体2的后部右侧设置有操纵部22。关于本实施方式的鳞茎蔬菜收割机1,左右的行驶履带20、20跨越土埂而行驶,但是,并不限定于此。例如,在无土埂田地的情况下,行驶履带20、20在鳞茎蔬菜被收割后的田地的土壤上行驶。
27.在行驶机体2的后部左侧搭载有发动机10。在发动机10的前下方且在左右的行驶履带20之间,配置有用于适当地对来自发动机10的动力进行变速并将其传递给左右的行驶履带20的变速箱11。
28.收割部3具备分禾装置31、耙拢装置32、挖掘装置33、拔出输送装置34、除土装置35、肩部对齐装置36、茎叶切断装置37以及收割部框架38。
29.分禾装置31将茎叶部gb向上方扶起而将大蒜g按垄分开。耙拢装置32对大蒜g的茎叶部gb进行耙拢并将其交接给拔出输送装置34。挖掘装置33进入大蒜g的下方并将土破碎以便容易地拔出大蒜g。拔出输送装置34对从耙拢装置32交接的茎叶部gb进行夹持,并将夹持的大蒜g以立起姿势向后上方进行输送。除土装置35(相当于第1除土装置)将附着于由拔出输送装置34输送的大蒜g的球部ga的土刮落。肩部对齐装置36将由拔出输送装置34输送的大蒜g的球部ga与茎叶部gb的边界部分作为肩部、并使得该肩部的高度对齐。茎叶切断装置37将肩部由肩部对齐装置36保持的大蒜g的茎叶部gb切断,以使茎叶部gb以大致相同的高度残留。
30.分禾装置31穿过垄间而将倒伏在田地中的大蒜g的茎叶部gb向上方扶起而进行分禾。分禾装置31具备利用来自发动机10的动力而进行纵向旋转的搂齿31a,通过使搂齿31a旋转而将大蒜g的茎叶部gb向上方扶起。分禾装置31以隔着垄的方式设置有5个以便将大蒜g按垄分开。在本实施方式中,针对4垄栽植而设置5个分禾装置31。即,针对n垄栽植而设置n 1个分禾装置31。配置于左右两侧的2个分禾装置31的分禾箱31b固定于第1框架33c(在后面叙述)。另外,配置于中央的3个分禾装置31的分禾箱31b固定于沿左右方向延伸的上部框
架382(在后面叙述)。分禾装置31由贯通分禾箱31b的分禾驱动轴31c驱动。
31.耙拢装置32具备:利用来自的发动机10的动力而横向旋转的搂齿32a。耙拢装置32分别设置于相邻的分禾装置31之间。左侧的2个耙拢装置32统一将左侧的2垄大蒜g的茎叶部gb交接给左侧的拔出输送装置34。同样地,右侧的2个耙拢装置32统一将右侧的2垄大蒜g的茎叶部gb交接给右侧的拔出输送装置34。耙拢装置32固定于分禾驱动轴31c,由从分禾驱动轴31c传递的动力驱动。
32.挖掘装置33配置于耙拢装置32的下方。挖掘装置33具备:主视观察时呈近似u字状的挖掘刃33a,其利用来自发动机10的动力而前后摆动;以及左右一对支承体33b、33b,它们与挖掘刃33a连结且能够前后摆动。另外,挖掘装置33具备:第1框架33c,其将左右一对支承体33b、33b支承为能够前后摆动且固定于收割部框架38;以及第2框架33d,其用于将第1框架33c作为脚手架而对分禾装置31进行固定。支承体33b以能够旋转的方式支承于第1框架33c以及第2框架33d,并能够使挖掘刃33a前后摆动。挖掘刃33a形成为能够挖掘4垄的宽度。将挖掘刃33a插入到土内并使其位于比大蒜g的球部ga更靠下方的位置,一边使挖掘刃33a前后摆动一边使鳞茎蔬菜收割机1前进,从而将土破碎而使得土壤变得松软,由此容易拔出大蒜g。挖掘装置33在挖掘刃33a的左右两侧具备卷边部件33e、33e。卷边部件33e是向前下方延伸的棒状部件,一边前进一边将前端插入到地膜的下方而进行地膜的卷起。
33.拔出输送装置34从耙拢装置32的下方朝向后上方倾斜地配置。拔出输送装置34一边夹持茎叶部gb向后上方输送一边拔出大蒜g并将其向后上方输送。
34.拔出输送装置34在收割部框架38并排设置有2个。各拔出输送装置34具有:驱动带轮34a,其利用来自发动机10的动力而旋转;从动带轮34b,其相对于驱动带轮34a而从动;以及左右一对环形输送带34c,它们卷绕于驱动带轮34a以及从动带轮34b。利用左右一对环形输送带34c夹持大蒜g的茎叶部gb、且利用拔出输送装置34的前端部将大蒜g拔出并向后上方输送。
35.除土装置35配置于拔出输送装置34的下方。除土装置35固定于收割部框架38。除土装置35具备:除土驱动轴35a,其利用来自发动机10的动力而旋转;以及弹性体35b,其使得棒状体配置成辐射状而形成。借助除土驱动轴35a的旋转而使得弹性体35b旋转,由此使得弹性体35b与由拔出输送装置34输送的大蒜g的球部ga接触而将土刮落。
36.肩部对齐装置36在收割部框架38并排设置有2个。各肩部对齐装置36大致水平地配置于构成拔出输送装置34的环形输送带34c的下方。各肩部对齐装置36具有:多个带轮36a,它们利用来自发动机10的动力而旋转;以及左右一对肩部对齐环形带36b,它们卷绕于多个带轮36a。肩部对齐装置36与拔出输送装置34的左右一对环形输送带34c同步地驱动左右一对肩部对齐环形带36b,由此使得大蒜g的茎叶部gb被拔出输送装置34拔起,将大蒜g的球部ga与茎叶部gb的边界部分作为肩部,利用肩部对齐环形带36b使得该肩部止动,其结果,使得肩部的高度对齐。
37.茎叶切断装置37配置于肩部对齐装置36的后上部。茎叶切断装置37具备圆板上的旋转刃37a,旋转刃37a大致水平地配置。利用肩部对齐装置36将肩部对齐后的大蒜g以茎叶部gb以大致相同的高度残留的方式由旋转刃37a切断。
38.在拔出输送装置34的后端部设置有将切断后的茎叶部gb向左右方向外侧释放的释放引导件341。释放引导件341具有棒状部件341a,该棒状部件341a在俯视观察时从一对
驱动带轮34a、34a中的左右方向内侧的驱动带轮34a的前方穿过驱动带轮34a、34a之间并朝后方延伸,进而穿过左右方向外侧的驱动带轮34a的后方并朝左右方向外侧延伸。棒状部件341a上下设置有2个。棒状部件341a配置于驱动带轮34a的下方。另外,释放引导件341具备在2个棒状部件341a之间旋转的带突起轮341b。带突起轮341b与驱动带轮34a联动地旋转。释放引导件341能够利用旋转的带突起轮341b沿着棒状部件341a而输送茎叶部gb。通过在拔出输送装置34设置释放引导件341而将不需要的茎叶部gb向左右方向外侧释放,由此能够防止茎叶部gb向下掉落到输送机4。
39.收割部框架38具备:左右一对侧部框架381、381;上部框架382,其将侧部框架381、381的上部连结;以及后部框架383,其将侧部框架381、381的后部连结。侧部框架381在侧视观察时呈近似三角形。如前面叙述的那样,分禾装置31以及除土装置35固定于上部框架382。
40.收割部框架38以能够上下转动的方式支承于输送机4。具体而言,侧部框架381的下端利用转动自如地设置于输送机4始端部的支承部件而固定于输送机4,收割部框架38以收割部转动支点38a为中心进行转动。
41.另外,收割部框架38以能够上下转动的方式支承于行驶机体2。具体而言,侧部框架381的后端借助转动自如地设置于行驶机体2上部的连杆机构39而固定于行驶机体2。连杆机构39具备:第1连杆391,其以能够旋转的方式与收割部框架38连结;第2连杆392,其以能够旋转的方式与第1连杆391及机体框架21连结;以及第3连杆393,其以能够旋转的方式与第2连杆392连结。
42.第1连杆391是棒状部件,其一端部以能够旋转的方式与收割部框架38连结,其另一端部以能够旋转的方式与第2连杆392连结。收割部框架38相对于第1连杆391而绕后方支点38b旋转。
43.第2连杆392是t字状部件,t字的一侧端部以能够旋转的方式与第1连杆391连结,t字的另一侧端部以能够旋转的方式与机体框架21连结。第1连杆391相对于第2连杆392而绕第1支点391a旋转。第2连杆392相对于机体框架21而绕连杆转动支点39a旋转。另外,第2连杆392的t字的下端部以能够旋转的方式与第3连杆393连结。
44.第3连杆393是棒状部件,其一端部以能够旋转的方式与第2连杆392连结,其另一端部以能够旋转的方式与液压缸394的活塞杆前端的前端侧轴体394a连结。第2连杆392相对于第3连杆393而绕第2支点392a旋转。第3连杆393相对于前端侧轴体394a而绕第3支点393a旋转。
45.关于液压缸394,活塞杆以能够旋转的方式与前端侧轴体394a连结,缸筒以能够旋转的方式与机体框架21连结。前端侧轴体394a相对于液压缸394而绕第4支点394b旋转。液压缸394相对于机体框架21而绕缸转动支点394c旋转。
46.收割部3在收割部框架38的左右两侧具备量规轮30。量规轮30以能够利用支柱30a调整高度的方式安装于收割部框架38。量规轮30在地表行驶而能够防止收割部3因挖掘刃33a的负载而潜入。
47.输送机4从行驶机体2的前部向后上方倾斜地配置。另外,输送机4的始端部配置于拔出输送装置34的下方。即,配置成:在俯视观察时拔出输送装置34的后部和输送机4的前部重叠。由此,输送机4能够将茎叶部gb被切断并从拔出输送装置34向下掉落的大蒜g的球
部ga向后上方输送。
48.输送机4是具备沿左右方向延伸的多个杆41的杆式输送机。关于多个杆41,每隔规定的间隔包括安装有多个突出体41a的杆41,从而能够将球部ga适当地向后方输送。杆41的两端固定于内置于左右一对链箱42、42中的未图示的环形链。环形链利用来自发动机10的动力而进行驱动。
49.在输送机4的始端部设置有用于从拔出输送装置34接受球部ga的交接引导件43。通过在输送机4的始端部设置交接引导件43而能够将从拔出输送装置34向下掉落的大蒜g的球部ga可靠地接住并将其向后方输送。交接引导件43具备:板状的前引导件43a,其从左右的链箱42、42之间向前上方延伸;以及板状的横向引导件43b,其从链箱42向上方延伸。另外,在前引导件43a的下部,以将最前方的杆41与前引导件43a之间的间隙填满的方式设置有下引导件43c。在下引导件43c且在与突出体41a对应的位置,以能够供突出体41a穿过的方式设置有缺口部,该缺口部在俯视观察时呈梳状。
50.在输送机4的后方设置有料斗44,由输送机4输送的大蒜g的球部ga借助料斗44而回收至放置于行驶机体2后方的集装箱。料斗44配置于发动机10与操纵部22之间。
51.输送机4可以具备:将附着于输送的球部ga的土刮落的除土刷47(相当于第2除土装置)。除土刷47是将棒状的弹性体配置成辐射状的旋转体。在本实施方式中,除土刷47设置有2个。除土刷47安装成:能够对从由多个杆41构成的输送面起算的高度进行调整。
52.在行驶机体2的后方设置有供集装箱载置的集装箱载置台23。集装箱载置台23形成为在左右方向上较长的矩形,能够在左右方向上至少并排放置3个集装箱。料斗44配置于集装箱载置台23的左右方向中央。由此,能够在集装箱载置台23且在从料斗44投入球部ga的集装箱23a的左右两侧放置空置的集装箱23b与满载的集装箱23c,所以,辅助者进行集装箱的供给、排出而能够实现连续作业。
53.输送机4以能够上下转动的方式支承于行驶机体2。具体而言,输送机4的后端部以能够旋转的方式固定于在机体框架21立起设置的纵框架21a,并以输送机转动支点45为中心而转动。
54.输送机4的下部借助托架46而固定于前端侧轴体394a。由此,使液压缸394伸缩而能够使得输送机4以输送机转动支点45为中心而上下转动。
55.图7a是对栽植于无土埂的田地中的大蒜g进行收割的鳞茎蔬菜收割机1的侧视图。图7b是对栽植于土埂的大蒜g进行收割的鳞茎蔬菜收割机1的侧视图。收割部3以及输送机4通过使液压缸394伸缩而能够在图7a所示的状态和图7b所示的状态之间改变姿势。
56.若从图7a所示的状态使液压缸394伸出,则前端侧轴体394a被向前方按压,所以,输送机4以输送机转动支点45为中心而向上方转动,从而如图7b所示那样使得输送机4的前端上升。另外,若从图7a所示的状态使液压缸394伸出,则前端侧轴体394a被向前方按压,由此,借助与前端侧轴体394a连结的连杆机构39的作用而使得收割部框架38以收割部转动支点38a为中心向前方转动。其结果,收割部3能够如图7b所示那样不改变姿势而上升。由此,在图7a所示的状态与图7b所示的状态下,大蒜g与收割部3之间的相对位置不会变化,所以,无需进行分禾装置31、耙拢装置32、挖掘装置33、拔出输送装置34等各装置的位置调整。此外,在图7a所示的状态与图7b所示的状态下,拔出输送装置34的后端与输送机4的前端的前后方向位置几乎不会变化,所以,能够在收割部3与输送机4之间顺畅地进行大蒜g的交接。
57.如上,本实施方式的鳞茎蔬菜收割机1具备:行驶机体2;拔出输送装置34,其将栽植于田地中的大蒜g拔出,并一边夹持茎叶部gb一边向后上方输送;以及输送机4,其从拔出输送装置34接受大蒜g且将其向后上方输送并进行回收,拔出输送装置34配置于输送机4的前方。
58.根据该结构,将大蒜g拔出并输送的拔出输送装置34、与从拔出输送装置34接受大蒜g并对其进行输送和回收的输送机4前后并排配置,所以,能够降低鳞茎蔬菜收割机1的总高度,能够使整体变得紧凑。
59.另外,可以在输送机4的始端部设置用于从拔出输送装置34接受大蒜g的交接引导件43。
60.通过在输送机4的始端部设置交接引导件43,能够使得输送机4将从拔出输送装置34向下掉落的大蒜g的球部ga可靠地接住并向后方输送。
61.另外,鳞茎蔬菜收割机1可以具备茎叶切断装置37,该茎叶切断装置37配置于拔出输送装置34的下方,并将由拔出输送装置34输送的大蒜g的茎叶部gb切断。
62.通过利用茎叶切断装置37将茎叶部gb切断,能够使得球部ga从拔出输送装置34向下掉落至输送机4。
63.另外,可以在拔出输送装置34的后端部设置将由茎叶切断装置37切断后的茎叶部gb向左右方向外侧释放的释放引导件341。
64.通过设置释放引导件341,能够将不需要的茎叶部gb向左右方向外侧释放,由此能够防止茎叶部gb向下掉落至输送机4。
65.另外,鳞茎蔬菜收割机1可以具备除土装置35,该除土装置35配置于拔出输送装置34的下方且是输送机4的前方,并将由拔出输送装置34输送的大蒜g的土刮落。
66.根据该结构,能够将在从拔出输送装置34向输送机4交接大蒜g之前附着的土刮落。
67.另外,输送机4可以具备:将输送中的大蒜g的土刮落的除土刷47。
68.根据该结构,能够有效地将在收纳于集装箱等之前附着于大蒜g的土刮落。
69.另外,鳞茎蔬菜收割机1可以具备挖掘装置33,该挖掘装置33配置于拔出输送装置34的前方且进入大蒜g的下方进行挖掘,在挖掘装置33的两侧朝向前方设置有将地膜的两端部卷起的卷边部件33e。
70.根据该结构,能够防止地膜的两端部与挖掘刀33e接触。
71.另外,鳞茎蔬菜收割机1可以具备集装箱载置台23,该集装箱载置台23配置于输送机4的后方,且供收纳由输送机4输送的大蒜g的集装箱载置。
72.由于能够将集装箱载置于集装箱载置台23,所以,能够容易地回收收割的大蒜g。
73.另外,本实施方式的鳞茎蔬菜收割机1可以具备:行驶机体2;收割部3,其将栽植于田地中的大蒜g拔出并向后上方输送;以及输送机4,其从收割部3接受大蒜g并且将其向后上方输送并进行回收,输送机4以终端部为支点上下转动,收割部3不改变姿势而与输送机4联动地上下升降。
74.例如,关于前面叙述的专利文献2的收割机,若使拔出输送装置与土埂高度相匹配地上下升降,则处于拔出输送装置前部的挖掘装置的角度会发生变化,从而有可能无法适当地收割鳞茎蔬菜。
75.在本实施方式中,收割部3不改变姿势而上下升降,从而,即便在对栽植于土埂高度不同的田地中的大蒜g进行收割时,收割部3的角度也不会发生变化,所以,即便是土埂高度不同的田地也能够适当地收割大蒜g。
76.另外,收割部3可以以能够上下转动的方式支承于输送机4的前部。
77.根据该结构,即便在输送机4以终端部为支点而上下转动的情况下,收割部3也能够相对于输送机4而上下转动,所以,收割部3能够不改变姿势而上下升降。
78.另外,可以构成为:当输送机4向上方转动,收割部3的前部相对于输送机4而相对地向下方转动,当输送机4向下方转动时,收割部3的前部相对于输送机4而相对地向上方转动。
79.根据该结构,收割部3能够不改变姿势而上下升降。
80.另外,可以构成为:收割部3的后端部借助连杆机构39而支承于行驶机体2,连杆机构39与输送机4的中途部连结,通过输送机4的转动发挥作用而使得收割部3转动。
81.根据该结构,收割部3能够不改变姿势而与输送机4联动地上下升降。
82.综上可知,本实施方式的鳞茎蔬菜收割机还能够如以下那样表述。
83.1.一种鳞茎蔬菜收割机,其具备:
84.行驶机体;
85.收割部,其将栽植于田地中的鳞茎蔬菜拔出并向后上方输送;以及
86.输送机,其从所述收割部接受所述鳞茎蔬菜并将其向后上方输送而进行回收,
87.所述输送机以终端部为支点而上下转动,所述收割部不改变姿势而与所述输送机联动地上下升降。
88.2.根据前述1所述的鳞茎蔬菜收割机,其中,
89.所述收割部以能够上下转动的方式支承于所述输送机的前部。
90.3.根据前述2所述的鳞茎蔬菜收割机,其中,
91.当所述输送机向上方转动时,所述收割部的前部相对于所述输送机而相对地向下方转动,当所述输送机向下方转动时,所述收割部的前部相对于所述输送机而相对地向上方转动。
92.4.根据前述2所述的鳞茎蔬菜收割机,其中,
93.所述收割部的后端部借助连杆机构而支承于所述行驶机体,
94.所述连杆机构与所述输送机的中途部连结,通过所述输送机的转动发挥作用而使得所述收割部转动。
95.[其他实施方式]
[0096]
(1)如图8所示,输送机4可以具备升降输送机48,该升降输送机48用于将收割物输送到在与鳞茎蔬菜收割机1并行行驶的未图示的搬运车载置的铁集装箱48c。
[0097]
(2)作为使收割部3不改变姿势而与输送机4联动地上下升降的机构,并不限定于前面叙述的实施方式。例如图9a以及图9b所示,使收割部3升降的机构可以由将收割部3以及输送机4分别作为连杆的平行连杆构成。在该情况下,设置有与输送机4大致平行的连杆,且该连杆以能够旋转的方式分别支承于收割部3和纵框架21a。根据该结构,收割部3通过使液压缸394伸长,能够不改变姿势而从图9a所示的状态向图9b所示的状态上升。
[0098]
(3)关于前面叙述的实施方式所涉及的鳞茎蔬菜收割机1,收割部3的左右两端位
于左右的行驶履带20、20的内侧。根据该鳞茎蔬菜收割机1,在无土埂田地的整个面栽植大蒜g的情况下,栽植于收割部3两侧的那垄大蒜g会被行驶履带20踩踏。因而,包括拔出输送装置34在内的收割部3的两端可以设定为宽度比行驶机体2的机体宽度、即左右的行驶履带20、20的外侧端更宽。由此,行驶履带20会在由收割部3收割后的地面行驶,所以,能够对栽植于田地的整个面的大蒜g进行收割。例如,为了能够收割6垄大蒜g而以如下方式构成即可:在左右分别追加1个分禾装置31以及耙拢装置32,此外追加1个拔出输送装置34,使行驶履带20的外侧端位于比追加的左右两侧的分禾装置31更靠内侧的位置。此时,另外设置从中央的拔出输送装置34的后端向左右任一侧的后方延伸的排出用输送带,以使得从中央的拔出输送装置34排出的茎叶部gb不会向下掉落至输送机4。
[0099]
以上基于附图对本技术的实施方式进行了说明,但是,应当认为具体结构并不限定于这些实施方式。本技术的范围不仅由上述实施方式的说明来表示,而且还由权利要求书来表示,还包括与权利要求书等同的含义以及范围内的各种变更。
[0100]
工业上的利用可能性
[0101]
本发明能够用于对鳞茎蔬菜进行收割的鳞茎蔬菜收割机。
[0102]
附图标记说明
[0103]1…
鳞茎蔬菜收割机;2
…
行驶机体;3
…
收割部;4
…
输送机;23
…
集装箱载置台;31
…
分禾装置;32
…
耙拢装置;33
…
挖掘装置;34
…
拔出输送装置;35
…
除土装置;36
…
肩部对齐装置;37
…
茎叶切断装置;38
…
收割部框架;39
…
连杆机构;43
…
交接引导件;47
…
除土刷;48
…
升降输送机;341
…
释放引导件。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。