技术特征:
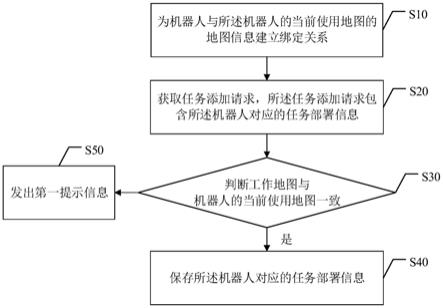
1.一种机器人调度平台,其特征在于,包括存储器和处理器,所述存储器存储有程序代码,所述处理器,用于调用所述程序代码,并当所述程序代码被执行时,所述机器人调度平台被布置为:为机器人与所述机器人当前使用地图的地图信息建立绑定关系;获取任务添加请求,所述任务添加请求包含所述机器人对应的任务部署信息,所述任务部署信息包含目标工作任务和所述目标工作任务对应的工作地图的地图信息;根据所述绑定关系和所述工作地图的地图信息,判断所述工作地图是否与所述机器人的当前使用地图一致;当所述工作地图与所述机器人的当前使用地图一致,则保存所述机器人对应的任务部署信息,以通过所述任务部署信息为所述机器人部署工作任务。2.如权利要求1所述的机器人调度平台,其特征在于,所述机器人调度平台还被布置为:当所述工作地图与所述机器人的当前使用地图不一致,则发出第一提示信息,所述第一提示信息用于指示所述工作地图与所述机器人的当前使用地图不一致。3.如权利要求1所述的机器人调度平台,其特征在于,所述机器人调度平台还被布置为:接收所述机器人的任务拉取请求;响应所述任务拉取请求,确定是否保存有所述机器人对应的任务部署信息;当保存有所述机器人对应的任务部署信息,将所述机器人对应的任务部署信息反馈回所述机器人。4.如权利要求1所述的机器人调度平台,其特征在于,所述机器人调度平台还被布置为:当接收到用于绑定目标门店与所述机器人的绑定请求时,判断所述机器人已部署工作任务对应的所有工作地图,是否均与所述机器人的当前使用地图一致;当所述已部署工作任务对应的所有工作地图中,均与所述机器人的当前使用地图一致,显示所述机器人的所有所述已部署工作任务。5.如权利要求4所述的机器人调度平台,其特征在于,所述机器人调度平台还被布置为:当所述已部署工作任务对应的所有工作地图中,存在与所述机器人的当前使用地图不一致的工作地图,则将不一致的工作地图对应的所述已部署工作任务的任务状态设为地图异常状态;显示所述机器人的所有所述已部署工作任务和对应的任务状态。6.如权利要求1-5任一项所述的机器人调度平台,其特征在于,所述机器人的所有已部署工作任务中包含已停用任务;所述机器人调度平台还被布置为:当接收到针对所述已停用任务的启用请求时,判断所述已停用任务对应的工作地图是否与所述机器人的当前使用地图一致;当所述已停用任务对应的工作地图与所述机器人的当前使用地图为不一致,则发出第二提示信息,并将所述已停用任务的任务状态设为地图异常状态,所述第二提示信息用于指示所述机器人的当前使用地图已调整。
7.如权利要求6所述的机器人调度平台,其特征在于,所述机器人调度平台还被布置为:当所述已停用任务对应的工作地图与所述机器人的当前使用地图一致,则将所述已停用任务对应的任务状态设为启用状态。8.一种机器人,其特征在于,包括存储器和处理器,所述存储器存储有程序代码,所述处理器,用于调用所述程序代码,并当所述程序代码被执行时,所述机器人被布置为:从机器人调度平台获取所述机器人对应的任务部署信息,所述任务部署信息包含目标工作任务;其中,所述任务部署信息为如权利要求1-7任一项所述的机器人调度平台所部署的信息;根据所述目标工作任务部署所述机器人的工作任务。9.如权利要求8所述的机器人,其特征在于,所述机器人根据所述目标工作任务部署所述机器人的工作任务之后,所述机器人还被布置为:根据所述目标工作任务和所述机器人接收所述任务部署信息之前的任务部署情况,确定被执行工作任务;执行所述被执行工作任务。10.如权利要求9所述的机器人,其特征在于,所述机器人根据所述目标工作任务和所述机器人接收所述任务部署信息之前的任务部署情况,确定被执行工作任务时,被布置为:判断所述机器人接收所述任务部署信息之前是否有已部署工作任务;当有所述已部署工作任务,则将所述目标工作任务和已部署工作任务作为待选工作任务;当未有所述已部署工作任务,则将所述目标工作任务作为所述待选工作任务;根据所述待选工作任务的执行时段确定所述被执行工作任务。11.如权利要求9所述的机器人,其特征在于,所述机器人确定被执行工作任务之后,所述机器人还被布置为:判断所述被执行工作任务对应的工作地图是否与所述机器人的当前使用地图一致;当全部一致,则显示所有的所述被执行工作任务;当存在不一致,则仅显示地图一致的所述被执行工作任务。12.一种任务部署方法,其特征在于,所述任务部署方法包括:为机器人与所述机器人当前使用地图建立绑定关系;获取任务添加请求,所述任务添加请求包含所述机器人对应的任务部署信息,所述任务部署信息包含目标工作任务和所述目标工作任务对应的工作地图的地图信息;根据所述绑定关系和所述工作地图的地图信息,判断所述工作地图是否与所述机器人的当前使用地图一致;当所述工作地图与所述机器人的当前使用地图一致,则保存所述机器人对应的任务部署信息,以通过所述任务部署信息为所述机器人部署工作任务。13.一种任务部署方法,其特征在于,所述任务部署方法包括:从机器人调度平台获取所述机器人对应的任务部署信息,所述任务部署信息包含目标工作任务;其中,所述任务部署信息为如权利要求1-7任一项所述的机器人调度平台所部署的信息;
根据所述目标工作任务部署所述机器人的工作任务。14.一种机器人任务自动部署系统,其特征在于,包括如权利要求1-7任一项所述的机器人调度平台,以及如权利要求8-11任一项所述的机器人。15.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-7任一项所述的机器人调度平台所实现的步骤,或者实现如权利要求8-11任一项所述的机器人所实现的步骤。
技术总结
本申请涉及机器人技术领域,公开了一种机器人调度平台、机器人、介质、任务部署方法与系统,用于提高任务部署效率。其中,机器人调度平台被布置为:为机器人与机器人的当前使用地图的地图信息建立绑定关系;获取任务添加请求,任务添加请求包含机器人对应的任务部署信息,任务部署信息包含目标工作任务和目标工作任务对应的工作地图的地图信息;根据绑定关系和工作地图的地图信息,判断工作地图是否与机器人的当前使用地图一致;当工作地图与机器人的当前使用地图一致,则保存机器人对应的任务部署信息,以通过所述任务部署信息为所述机器人部署工作任务。部署工作任务。部署工作任务。
技术研发人员:郑静萍 黄珊
受保护的技术使用者:深圳市普渡科技有限公司
技术研发日:2021.12.24
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。