1.本发明属于海洋牧场资源监测技术领域,涉及一种海洋牧场牡蛎海床中牡蛎生物量的监测方法。
背景技术:
2.牡蛎海床是底栖生物的良好栖息地和海洋基因库,并具有净化水体、耦合生态系统能量流动、稳定海岸线与底质、促进营养物质循环等生态功能,对维持近岸海域生态系统平衡发挥着重要作用。
3.研究表明,受潮汐流场的影响,96%以上的牡蛎幼虫在繁殖期将脱离初始礁体,随海流迁移至周边海域;海洋牧场中的岩性人工鱼礁是良好的牡蛎幼虫固着基,可为牡蛎的生长发育提供适宜生境,实现牡蛎海床的修复和再生。因此,需要对海洋牧场中牡蛎海床的牡蛎生物量进行科学有效的监测,以定量验证和评价海洋牧场对牡蛎海床的修复作用,为下一步海洋牧场建设和牡蛎海床修复工程提供技术支持和科学依据。
4.然而,随着人工鱼礁的大量投放,海洋牧场海床转变为礁岩性质的高度异质性底栖生境,类型多样且差异显著,传统的定点采样、局部拖网的底栖生物调查方法存在较大问题:
5.1)牡蛎生物在海洋牧场海床上呈现垂直向上叠置生长的形态,计算其生物量需考虑垂向分布。传统的调查方法可以获取牡蛎海床的表层数据,但难以获取牡蛎海床垂向分布的三维数据,无法对牡蛎的生物量进行科学有效的计算;
6.2)海洋牧场中牡蛎海床多聚集于人工鱼礁周边,牡蛎生物量的计算需要在有效识别人工鱼礁的基础上,排除人工鱼礁的干扰。常规的人工鱼礁识别通常采用专家主观判断的方法,虽然可以识别人工鱼礁的空间位置,但无法精确计算其覆盖面积,且效率较低,给牡蛎生物量的计算带来了难题;
7.3)海洋牧场中投放了大量人工鱼礁,礁体密布,常规的粗放式底拖网调查方法在海洋牧场中易于触礁,航行安全无法保证;同时,常规底拖网调查方法无法将作业范围精确控制在牡蛎海床内,调查结果可能出现偏差,牡蛎的单位体积生物量的计算存在较大困难。
8.综上,海洋牧场作为我国渔业发展的新业态,对牡蛎海床有重要的修复和再生作用。同时,海洋牧场中牡蛎海床的牡蛎生物量监测面临着新的挑战,需要采取新的技术手段予以解决。
技术实现要素:
9.本发明的目的在于克服传统调查技术的不足,提供一种海洋牧场牡蛎海床中牡蛎生物量的监测方法。本方法可以实现礁体密布海床生境下底拖网调查的安全与精准作业、人工鱼礁覆盖面积的快速有效识别以及牡蛎生物量的三维立体计算,从而可以科学高效的计算海洋牧场牡蛎海床中牡蛎生物量,评估海洋牧场对牡蛎海床的修复和再生效果,为海洋牧场构建和牡蛎海床的修复再生提供技术支撑。
10.本发明解决其技术问题是采取以下技术方案实现的:
11.步骤1、获取牡蛎与人工鱼礁混合海床的水深栅格数据集;
12.步骤2、获取牡蛎与人工鱼礁混合海床中牡蛎海床的水深栅格数据集;
13.步骤3、计算牡蛎海床中牡蛎的总体积;
14.步骤4、调查牡蛎海床中牡蛎的单位体积生物量;
15.步骤5、计算海洋牧场牡蛎海床中牡蛎的总生物量。
16.其中,步骤1所述获取牡蛎与人工鱼礁混合海床的水深栅格数据集的过程包括:
17.a、利用差分式gps、多波束测深仪和外围传感器,采集海洋牧场海床的水深数据,形成海洋牧场水深栅格数据集和多波束声学图像,坐标系为gcs_wgs_1984;作业时需即时导入gps定位信息,定位精度≤1m,声学数据采集分辨率≤0.1m;外围传感器采集横摇、纵摇、艏摇、声速、潮位以及吃水误差数据并对水深数据进行标定和校准;
18.b、利用差分式gps和侧扫声纳,采集海洋牧场海床的反向散射回波强度数据,形成海洋牧场侧扫声纳声学图像,坐标系为gcs_wgs_1984;作业时需即时导入gps定位信息,定位精度≤1m,声学数据采集分辨率≤0.1m;侧扫声纳图像处理过程中,需进行底跟踪操作,去除水柱的干扰;
19.c、基于上述a和b形成的多波束声学图像和侧扫声纳声学图像,结合专家知识判断法,将海洋牧场海床划分为不同的区域,并利用箱式采泥器在不同区域内采集海床样品,明确不同区域的海床类型;箱式采泥器的箱口面积≥0.05m2;箱式采泥器上方设置gps信号接受器,记录采样站位的经纬度;
20.d、定位牡蛎与人工鱼礁混合海床的空间位置,利用软件绘制牡蛎与人工鱼礁混合海床范围的面状矢量图像;
21.e、将牡蛎与人工鱼礁混合海床范围的面状矢量图像与海洋牧场水深栅格数据集进行叠加分析,提取牡蛎与人工鱼礁混合海床的水深栅格数据集。
22.其中,步骤2所述获取牡蛎与人工鱼礁混合海床中牡蛎海床的水深栅格数据集的过程包括:
23.a、利用人工鱼礁与牡蛎海床的高度差,对牡蛎与人工鱼礁混合海床的水深栅格数据集进行重分类的空间处理,确定牡蛎与人工鱼礁混合海床中牡蛎海床的覆盖范围,形成牡蛎海床的空间范围栅格数据集;重分类选用自然间断点分级法,分类数量为2。
24.b、将牡蛎海床的空间范围栅格数据集与步骤1获取的牡蛎与人工鱼礁混合海床区域内的水深栅格数据集进行叠加,去除人工鱼礁的覆盖区域,获取牡蛎海床水深栅格数据集。
25.其中,步骤3所述计算牡蛎海床中牡蛎的总体积的过程包括:
26.a、在牡蛎海床周边平坦区域设置点位,点位数量≥12个,平均分布于牡蛎海床东西南北4个方位;记录每个点位的水深值,计算求得所有点位的水深平均值,该平均值作为牡蛎海床底面的水深值;
27.b、将步骤2获得的牡蛎海床水深栅格数据集的gcs_wgs_1984坐标系转换成投影坐标系,单位为米;
28.c、将牡蛎海床底面的水深值与更换为投影坐标系后的牡蛎海床水深栅格数据集结合,并利用软件计算牡蛎海床的三维体积,作为牡蛎的总体积。
29.其中,步骤4所述调查牡蛎海床中牡蛎的单位体积生物量的过程包括:
30.a、随机选取牡蛎海床,基于亚米级差分式gps提供的定位信息,利用导入海洋牧场牡蛎海床空间范围栅格数据集的软件进行导航,开展牡蛎海床牡蛎调查工作;过程中,及时调整和控制调查船的航行路径,使其始终位于牡蛎海床范围内,并避免与人工鱼礁碰撞,保证航行安全;拖网路径长度≥100m;
31.b、航行过程中,使用耙子型底拖网采集牡蛎海床中的牡蛎样品,耙齿长度应≥20cm;
32.c、将牡蛎样品置于固定容量的容器内,计算求得牡蛎的单位体积生物量,该计算次数≥3,取其算术平均值;
33.其中,步骤5中所述计算海洋牧场牡蛎海床中牡蛎的总生物量是指将牡蛎海床中牡蛎的总体积与牡蛎的单位体积生物量相乘积,获得牡蛎海床中牡蛎的总生物量,公式如下:bo=b
uo
*vo;其中,bo为牡蛎海床中牡蛎的总生物量;b
uo
为牡蛎海床中牡蛎的单位体积生物量;vo为牡蛎海床中牡蛎的总体积。
34.本发明的优点和积极效果是:
35.(1)本发明成功解决了传统调查方法无法对海洋牧场中牡蛎海床的牡蛎生物量开展三维立体计算的难题:在本发明中,声学设备可以识别和定位牡蛎海床的空间位置和覆盖面积,并获取牡蛎海床的厚度,从而精确计算牡蛎海床的三维体积,为牡蛎生物量的监测提供可靠基础数据,提高海洋牧场牡蛎海床中牡蛎生物量监测的科学性和准确性;
36.(2)基于多波束声学数据,本发明成功实现了牡蛎和人工鱼礁混合海床中人工鱼礁覆盖面积的快速识别,克服了专家主观识别的不确定性,提高了识别的效率,使牡蛎海床中牡蛎生物量的计算更加精准;
37.(3)综合高精度海洋牧场声学图像、亚米级差分gps及实时导航软件的优势,本发明改进了传统的粗放式底拖网调查方式,大大减轻了海洋牧场中密布的礁体对调查船航行安全的威胁,并提高了牡蛎海床底拖网调查的可靠性和精准性,牡蛎单位体积生物量的计算更加科学。
附图说明
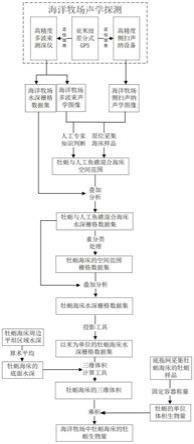
38.图1为本发明的一种海洋牧场牡蛎海床中牡蛎生物量监测方法的流程图;
39.图2为本发明实施例天津海洋牧场水深栅格数据集;
40.图3为本发明实施例天津海洋牧场多波束声学图像;
41.图4为本发明实施例天津海洋牧场侧扫声纳声学图像;
42.图5为本发明实施例天津海洋牧场水深栅格数据集的坐标系统;
43.图6为本发明实施例天津海洋牧场海床原位样品采集站位;
44.图7为本发明实施例天津海洋牧场声学图像特征与海床类型的对应关系;
45.图8为本发明实施例天津海洋牧场牡蛎与人工鱼礁混合海床的空间范围;
46.图9为本发明实施例arcgis软件的“掩膜提取”工具的操作界面;
47.图10为本发明实施例牡蛎与人工鱼礁混合海床水深栅格数据集;
48.图11为本发明实施例牡蛎与人工鱼礁混合海床水深栅格数据集的部分区域;
49.图12为本发明实施例重分类空间处理的工具界面和参数设置;
50.图13为本发明实施例牡蛎海床的空间范围栅格数据集;
51.图14为本发明实施例“设为空函数”工具的界面和参数设置;
52.图15为本发明实施例牡蛎海床的水深栅格数据集;
53.图16为本发明实施例牡蛎海床周边平坦区域设置的12个点位及其水深值;
54.图17为本发明实施例“投影栅格”工具的界面和参数设置;
55.图18为本发明实施例“表面体积”工具的界面和参数设置;
56.图19为本发明实施例指在差分式gps、海洋牧场牡蛎海床空间范围栅格数据集、导航软件的共同指导下,牡蛎海床拖网调查的实际路径;
57.图20为本发明实施例利用20l的容器,计算牡蛎的单位体积生物量的操作过程;
58.图21为本发明实施例天津海洋牧场牡蛎海床的6个分区。
具体实施方式
59.下面结合附图并通过具体实施例对本发明作进一步详述,以下实施例只是描述性的,不是限定性的,不能以此限定本发明的保护范围。
60.为验证本发明方法有效性,本发明实施例依托天津市大神堂海域国家级海洋牧场示范区(天津海洋牧场),对天津海洋牧场中牡蛎海床的牡蛎生物量进行了监测,具体实施过程如下:
61.步骤1.获取天津海洋牧场中牡蛎与人工鱼礁混合海床的水深栅格数据集
62.1)参考图2、图3和图5,本实施例利用美国r2 sonic公司2024型号多波束测深仪对天津海洋牧场区域的水深进行了探测。结合外围传感器,将作业过程中调查船的横摇、纵摇、艏摇、吃水及声速、潮位等误差进行标定和校准,获取精准的海洋牧场水深数据,导入arcgis 10.3软件进行拼接和镶嵌,形成海洋牧场水深栅格数据集(图2)和多波束声学图像(图3),其坐标系为gcs_wgs_1984(图5);作业时即时导入了gps定位信息,定位精度≤1m,声学数据采集分辨率为0.1m。
63.2)参考图4和图5,本实施例利用瑞典deep公司的de340型侧扫声纳对天津海洋牧场的海床进行了整体探测;设备频率为340khz,分辨率为0.1m,满足海床类型识别的需求;空间定位信息来源于亚米级差分式gps,定位精度≤1m;侧扫声纳数据处理软件采用deepview fv 3.0,将反向散射回波强度数据转化为侧扫声纳图像亮度信息,处理过程中,需进行了底跟踪操作,去除了水柱的干扰;利用arcgis 10.3软件对侧扫声纳数据进行了整体拼接和镶嵌,形成了天津海洋牧场侧扫声纳声学图像(图4),其坐标系为gcs_wgs_1984(图5);
64.3)参考图6和图7,基于上述多波束声学图像和侧扫声纳声学图像,将天津海洋牧场海床划分为不同的区域,设置70个站位(图6),利用0.05m2的箱式采泥器在不同区域内采集海床原位样品,明确了不同图像特征与海床类型的对应关系(图7),并将天津海洋牧场的海床类型分为了牡蛎类、人工鱼礁类、淤泥类、蛤仔泥混类、牡蛎泥混类及碎贝泥混类等6个类型;
65.4)参考图8,基于图像特征与海床类型的对应关系,定位了各类型海床的空间位置;由于牡蛎海床多分布与人工鱼礁周边,二者无法直接分割,此处需初步形成牡蛎与人工鱼礁混合海床的空间范围矢量图,在后续的步骤中对人工鱼礁进行识别和去除操作;
66.5)参考图9和图10,利用arcgis软件的“掩膜提取”工具(图9),从海洋牧场水深栅格数据集中,根据牡蛎与人工鱼礁混合海床的空间范围,提取牡蛎与人工鱼礁混合海床的水深栅格数据集(图10)。
67.步骤2获取牡蛎与人工鱼礁混合海床中牡蛎海床的水深栅格数据集
68.1)参考图11、图12和图13,以牡蛎与人工鱼礁混合海床的部分区域为例(图11),利用人工鱼礁与牡蛎海床之间的水深差,对牡蛎与人工鱼礁混合海床的水深栅格数据集开展重分类的空间处理(图12),分类方法选择“自然间断点分级法”,类别选择为“2”,自动计算出人工鱼礁与牡蛎海床的水深界线值为
“‑
4.73109951米”,然后将大于水深界线值的区域设置为“nodata”,小于水深界线值的区域设置为“1”,可获取牡蛎与人工鱼礁混合海床中牡蛎海床的覆盖范围,形成牡蛎海床的空间范围栅格数据集(图13);
69.2)参考图14和图15,利用“设为空函数”工具(图14),将牡蛎与人工鱼礁混合海床中的人工鱼礁去除,获得牡蛎海床的水深栅格数据集(图15);
70.步骤3获取牡蛎海床中牡蛎的总体积
71.1)参考图16,在牡蛎海床周边平坦区域设置12个点位,平均分布于牡蛎海床东西南北4个方位;记录每个点位的水深值,计算求得这12个点位的水深平均值为-6.1米,该值为牡蛎海床底面的水深值;
72.2)参考图17,利用“投影栅格”工具,将牡蛎海床水深栅格数据集的“gcs_wgs_1984”坐标系转换成“cgcs2000_3_degree_gk_cm_117e”投影坐标系,单位为米,新生成的栅格数据集记为“牡蛎海床水深_投影”;
73.3)参考图18,利用“表面体积”工具,“牡蛎海床水深_投影”作为输入表面,参考平面设置为“above”,平面高度设置为
“‑
6.1”,z因子设置为“1”,运行后可得出牡蛎海床的体积,作为牡蛎生物的体积。
74.步骤4获取牡蛎海床中牡蛎的单位体积生物量
75.1)参考图19,随机选取牡蛎海床,利用差分式gps提供定位信息,基于导入海洋牧场牡蛎海床空间范围栅格数据集的软件进行精准导航,实时调整和控制调查船的航行路径,使用底拖网采集牡蛎海床中的牡蛎样品,实际拖网路径如图19所示,长度123.8米,处于牡蛎海床范围内,并与人工鱼礁保持了安全距离;
76.2)参考图20,将采集的牡蛎样品置于20l的桶中,计算牡蛎的单位体积生物量为32.91kg/m3;
77.步骤5计算牡蛎海床中牡蛎的总生物量
78.参考图21,天津海洋牧场的牡蛎海床较为分散,将其分为6个子区域进行监测和计算,结果见表1,牡蛎总体积为150727.3立方米,与牡蛎单位体积生物量相乘积,获得了天津海域牧场中牡蛎海床的牡蛎生物量为4960.435443吨。
79.表1天津海洋牧场牡蛎海床牡蛎生物量计算
80.牡蛎海床子区域牡蛎体积(立方米)牡蛎生物量(吨)122634.5744.90139525045.6166.050696386971.22862.22219244591.1151.093101
54047133.18677627438.6903.004326合计150727.34960.435443
81.(1)本发明成功解决了传统调查方法无法对海洋牧场中牡蛎海床的牡蛎生物量开展三维立体计算的难题:在本发明中,声学设备可以识别和定位牡蛎海床的空间位置和覆盖面积,并获取牡蛎海床的厚度,从而精确计算牡蛎海床的三维体积,为牡蛎生物量的监测提供可靠基础数据,提高海洋牧场牡蛎海床中牡蛎生物量监测的科学性和准确性;
82.(2)基于多波束声学数据,本发明成功实现了牡蛎和人工鱼礁混合海床中人工鱼礁覆盖面积的快速识别,克服了专家主观识别的不确定性,提高了识别的效率,使牡蛎海床中牡蛎生物量的计算更加精准;
83.(3)综合高精度海洋牧场声学图像、亚米级差分gps及实时导航软件的优势,本发明改进了传统的粗放式底拖网调查方式,大大减轻了海洋牧场中密布的礁体对调查船航行安全的威胁,并提高了牡蛎海床底拖网调查的可靠性和精准性,牡蛎单位体积生物量的计算更加科学。
84.尽管为说明目的公开了本发明的实施例和附图,但是本领域的技术人员可以理解:在不脱离本发明及所附权利要求的精神和范围内,各种替换、变化和修改都是可能的,因此,本发明的范围不局限于实施例和附图所公开的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。