技术特征:
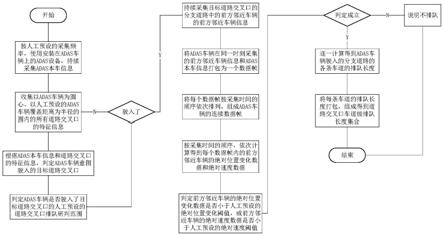
1.一种利用车载adas研判道路交叉口车道级排队长度的方法,其特征在于:包含以下步骤:s100.按人工预设的采集频率,使用安装在adas车辆上的adas设备,持续采集adas本车信息;所述adas本车信息包含所述adas车辆经度数据、adas车辆纬度数据、adas车辆车速数据和adas车辆航向角数据;s200.收集以adas车辆为圆心、以人工预设的adas车辆覆盖距离为半径的圆内的所有道路交叉口的特征信息;所述特征信息包含道路交叉口中心点经度数据、道路交叉口中心点纬度数据、adas车辆驶入的分支道路的停车线中心点经度数据和adas车辆驶入的分支道路的停车线中心点纬度数据;s300.根据所述adas本车信息和所述道路交叉口的特征信息,判定adas车辆意图驶入的目标道路交叉口;s400.判定adas车辆是否驶入了所述目标道路交叉口的人工预设的道路交叉口排队研判范围,并根据判定结果,做出如下操作:如果adas车辆驶入了道路交叉口排队研判范围,则执行s500;否则,再次执行s200;s500.持续采集所述目标道路交叉口的分支道路中的前方邻近车辆的前方邻近车辆信息;所述前方邻近车辆信息包含前方邻近车辆与adas车辆之间的相对位置数据和相对速度数据;所述相对位置数据包含相对纵向距离和相对横向距离;然后,将adas车辆在同一时刻采集的所述前方邻近车辆信息和所述adas本车信息打包为一个数据帧;然后将每个数据帧按采集时间的顺序依次排列,组成adas车辆的连续数据帧;s600.按采集时间的顺序,依次计算得到每个数据帧内的前方邻近车辆的绝对位置变化数据和绝对速度数据;然后,根据所述前方邻近车辆的绝对位置变化数据和绝对速度数据,做出如下操作:如果前方邻近车辆的绝对位置变化数据小于人工预设的绝对位置变化阈值,或前方邻近车辆的绝对速度数据小于人工预设的绝对速度阈值,则判定所述前方邻近车辆处于排队状态;然后执行s700;s700.根据所述特征信息、所述adas本车信息、所述前方邻近车辆的绝对位置变化数据和绝对速度数据,逐一计算得到adas车辆驶入的分支道路的各条车道的排队长度;然后,将每条车道的排队长度打包,组成得到道路交叉口车道级排队长度集合;所述道路交叉口车道级排队长度集合即为本方法所得的最终结果。2.根据权利要求1所述的利用车载adas研判道路交叉口车道级排队长度的方法,其特征在于:所述adas设备包含摄像头和雷达传感器。3.根据权利要求2所述的利用车载adas研判道路交叉口车道级排队长度的方法,其特征在于:s300中根据所述adas本车信息和所述道路交叉口的特征信息,判定adas车辆意图驶入的目标道路交叉口,具体包含以下步骤:s310.逐一计算adas车辆到以adas车辆为圆心、以人工预设的adas车辆覆盖距离为半径的圆内的所有道路交叉口的道路交叉口中心点之间的距离;s320.逐一计算adas车辆到以adas车辆为圆心、以人工预设的adas车辆覆盖距离为半径的圆内的所有道路交叉口的道路交叉口中心点的方位角;然后逐一计算adas车辆的adas
车辆航向角数据与每个道路交叉口中心点的方位角的差值;s330.判定以adas车辆为圆心、以人工预设的adas车辆覆盖距离为半径的圆内的adas车辆到道路交叉口中心点之间的距离最短,且adas车辆到道路交叉口中心点的方位角与adas车辆航向角数据的差值最小的道路交叉口为所述目标道路交叉口。4.根据权利要求2所述的利用车载adas研判道路交叉口车道级排队长度的方法,其特征在于:s600中每个数据帧内的前方邻近车辆的绝对位置变化数据按下式表达:s
j
=s l
following-l
leading
其中:s
j
为前方邻近车辆的绝对位置变化数据;s为adas车辆的在前一个数据帧到当前的数据帧之间的行驶距离;l
following
为前一个数据帧中adas车辆与前方邻近车辆的距离;l
leading
为当前的数据帧中adas车辆与前方邻近车辆的距离。5.根据权利要求2所述的利用车载adas研判道路交叉口车道级排队长度的方法,其特征在于:s600中前方邻近车辆的绝对速度数据按下式计算:v
i
=v δv其中:v
i
为前方邻近车辆的绝对速度数据;v为adas车辆车速数据;δv为前方邻近车辆与adas车辆之间的相对速度数据。6.根据权利要求1~5任一所述的利用车载adas研判道路交叉口车道级排队长度的方法,其特征在于:所述排队长度按下式计算:l=dis{o(l0,b0),h(l1,b1)}-δl-m其中:o(l0,b0)为目标道路交叉口的道路交叉口中心点的坐标;l0为所述目标道路交叉口的道路交叉口中心点的道路交叉口中心点经度数据;b0为所述目标道路交叉口的道路交叉口中心点的道路交叉口中心点纬度数据;h(l1,b1)为adas车辆的坐标;l1为adas车辆的adas车辆经度数据;b1为adas车辆的adas车辆纬度数据;dis{o(l0,b0),h(l1,b1)}为目标道路交叉口的道路交叉口中心点到adas车辆的距离;δl为目标道路交叉口的道路交叉口中心点到adas车辆驶入的分支道路的停车线中心点的距离;m为相对纵向距离。
技术总结
本发明涉及利用车载ADAS研判道路交叉口车道级排队长度的方法,包含以下步骤:持续采集ADAS本车信息;收集以ADAS车辆为圆心、以ADAS车辆覆盖距离为半径的圆内的道路交叉口的特征信息;持续采集前方邻近车辆信息;将前方邻近车辆信息和ADAS本车信息打包为一个数据帧;将数据帧组成连续数据帧;计算每个数据帧内的绝对位置变化数据和绝对速度数据;如果绝对位置变化数据小于绝对位置变化阈值,或绝对速度数据小于绝对速度阈值,则判定前方邻近车辆处于排队状态;计算各车道的排队长度;将排队长度打包成道路交叉口车道级排队长度集合。本发明从回避了道路交叉口的地形限制,打破了安装固定检测设备的各种限制;实现覆盖整个路网;成本极大降低。成本极大降低。成本极大降低。
技术研发人员:吴游宇 王丽园 熊文磊 李正军 马天奕 杨晶 罗丰 卢傲
受保护的技术使用者:中交第二公路勘察设计研究院有限公司
技术研发日:2021.12.10
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。