1.本发明属于航天测控技术领域,具体涉及基于球面矢量的再入返回航天器散布区域面积计算方法。
背景技术:
2.在航天器升力式或弹道式返回地球过程中,常常需要计算其落点散布范围、飞行可达区域等参数。为了评估再入返回航天器飞行区域进入某个特定范围(例如国境线)内的情况,需要计算飞行可达区域在预先选定的落点范围(落区)内部分的面积。
3.目前传统的再入目标区域面积计算,多采用基于二维平面地图的运算方法,这种方法的最大弊端在于其忽略了平面图形的失真对计算结果造成的影响,即未考虑球面形状时产生的面积误差过大问题,一般来说平面地图越靠近两极,面积误差越大。同时航天器地面飞行区域有时范围较广,对计算的时效性要求较高,为此需要设计一种考虑球面形状的、时效性高的计算方法。
技术实现要素:
4.本发明的目的是提供基于球面矢量的再入返回航天器散布区域面积计算方法,该面积计算方法耗时短、过程简洁。
5.本发明所采用的技术方案是,基于球面矢量的再入返回航天器散布区域面积计算方法,具体按照以下步骤实施:
6.步骤1,设定再入飞行区域边界球面多边形和指定目标区域球面多边形,以逆时针排列的一系列点来表示球面多边形;
7.步骤2,对再入飞行区域、指定的目标区域的球面多边形进行球面三角面片划分;
8.步骤3,遍历再入飞行区域边界球面多边形所分割的各个三角形,对每一个面片,计算其与指定目标区域球面多边形所分割的各个三角面片的相交部分有向球面面积;
9.步骤4,对步骤3所遍历计算的各个三角形相交面积进行累加得到两个多边形相交部分面积,即为再入飞行可达区域进入指定目标区域的面积。
10.本发明的特点还在于,
11.步骤2中,具体为:
12.对球面多边形,以选择的基准点为一个顶点,逆时针方向遍历其它顶点,每两个相邻的点与基准点组成一个三角形,这样就将球面多边形划分成了多个球面三角形。
13.步骤3中,具体为:
14.对飞行区域边界球面多边形中一个三角面片δa0a
iai 1
,首先判定该面片的正负号,符号记作signai,若为负值,则交换ai与a
i 1
坐标,形成临时三角形,若为非负数,则直接作为临时三角形;同样对目标区域球面多边形中一个三角面片δb0b
jbj 1
,其符号记为signbj,使用上述方法形成第二个临时三角形;然后计算两个临时三角形相交部分面积,记作s
ij
,则两个三角面片相交部分有向面积为:
15.f(δa0a
iai 1
,δb0b
jbj 1
)=signai×
signbj×sij
。
16.步骤4中,两个多边形相交部分面积的计算公式为:
[0017][0018]
本发明的有益效果是,基于常用的矢量运算和面积矢量概念,结合球面三角形运算法则,来实现航天器地面落点散布或着陆航行区在预定区域内面积的计算。相比传统的网格分割算法或其它一些平面内相交的几何算法,本发明的方法考虑了球面形状,且直接将计算过程建立在球面之上,而非传统的平面投影上;另外,该面积计算方法耗时短、过程简洁。
附图说明
[0019]
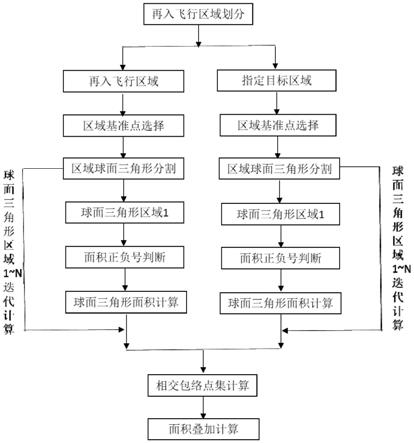
图1是本发明的基于球面矢量的再入返回航天器散布区域面积计算方法的流程图;
[0020]
图2是本发明的两个球面多边形示意图;
[0021]
图3是本发明的球面多边形三角划分示意图;
[0022]
图4是本发明的球面多边形相交部分计算示意图;
[0023]
图5是本发明的球面三角形示意图;
[0024]
图6是本发明的三角形相交部分计算示意图。
具体实施方式
[0025]
下面结合具体实施方式和附图对本发明进行详细说明。
[0026]
本发明基于球面矢量的再入返回航天器散布区域面积计算方法,如图1所示,具体按照以下步骤实施:
[0027]
步骤1,设定再入飞行区域边界球面多边形和指定目标区域球面多边形,以逆时针排列的一系列点来表示两个多边形,多边形的点采用球面经纬度坐标表示;
[0028]
如图2所示,两个球面多边形,第一个多边形顶点依次为a0、a1、a2…am-1
,顶点个数为m(m≥3);第二个多边形顶点依次为b0、b1、b2…bn-1
,顶点个数为n(n≥3);两个多边形的基准点均选择为第0个点;
[0029]
对这两个球面上的多边形区域表示,分别选择一个点作为基准点;一般情况下,可选择任一个点作为基准点,实际选择时建议结合步骤2的三角形划分进行,尽量使得划分的三角形最大的内角不要接近180度,避免三角形过于扁平。
[0030]
步骤2,将两个球面多边形分别进行分割,具体为:
[0031]
对球面多边形,以选择的基准点为一个顶点,逆时针方向遍历其它顶点,每两个相邻的点与基准点组成一个三角形,这样就将球面多边形划分成了n-2(当顶点总数为n时)个球面三角形;
[0032]
如图3所示,p0分别与p1p2、p2p3、p3p4、......、p
n-2
p
n-1
组成了n-2个球面三角形。
[0033]
步骤3,遍历再入飞行区域边界球面多边形所分割的各个三角形,对每一个面片,计算其与指定目标区域球面多边形所分割的各个三角面片的相交部分有向球面面积;具体
为:
[0034]
图4所示的两个球面多边形三角分割图;对飞行区域边界球面多边形中一个三角面片δa0a
iai 1
,首先判定该面片的正负号(符号记作signai),若为负值,则交换ai与a
i 1
坐标,形成临时三角形,若为非负数,则直接作为临时三角形;同样对目标区域球面多边形中一个三角面片δb0b
jbj 1
(其符号记为signbj),使用上述方法形成第二个临时三角形;然后计算两个临时三角形相交部分面积(记作s
ij
,为正数),则两个三角面片相交部分有向面积为:
[0035]
f(δa0a
iai 1
,δb0b
jbj 1
)=signai×
signbj×sij
ꢀꢀ
(1)
[0036]
a)三角形面片面积正负号判断,如图5所示,对按逆时针排列点遍历时形成一个三角形cba,若点a在cb弧线的逆时针方向,则定义该三角面片面积为正值,否则为负值。
[0037]
对点序列c、b、a,判断点a在点序列c、b逆时针方向方法为,首先计算出逆时针遍历的前两点与球心o所在平面的法向量
[0038][0039]
然后计算向量在该法向量上投影值(可采用点乘计算)
[0040][0041]
若其大于0,则在逆时针方向;若小于0,则在顺时针方向。
[0042]
b)球面三角形面积
[0043]
对图5的球面三角形,由球面三角余弦公式可计算出点a处三角形内角为
[0044]
a=cos-1
((cosa-cosbcosc)/(sinbsinc))
ꢀꢀ
(2)
[0045]
同样可计算出点b、c处的三角形内角(分别记为b、c)。
[0046]
则由球面三角形面积公式可得到三角形abc的面积为
[0047]
s=(a b c-π)
×
r2ꢀꢀ
(3)
[0048]
两个球面三角形相交部分计算方法,如图6所示为两个球面三角形,可采用切割算法来计算其相交区域(不一定是三角形)多边形边界点集。
[0049]
具体实现方法为:以逆时针点序遍历第一个三角形每两个相邻顶点构成的连线,循环判断第二个三角形各个顶点位置,若该顶点在连线逆时针方向,则保留;若在顺时针方向,则舍弃;若一个顶点与上一个顶点在不同方向,则计算当前连线与这两个顶点连线的交点,保留该交点;对第一个三角形遍历完后,即可得到对用当前连线切割第二个三角形一次后的剩余多边形包络点集。循环进行此切割即可最终得到两个三角形相交部分包络点集。
[0050]
以图6所示两个球面三角形δa0a1a2与δb0b1b2为例,计算相交三角形δb0b3b4面积,记作s
ij
,参照公式(1)a0,b0分别为两个球面三角形的基准点,i=1,j=1。根据公式(4)计算:
[0051]sij
=f(δa0a1a2,δb0b1b2)=(b0 b3 b
4-π)
×
r2ꢀꢀꢀꢀ
(4)
[0052]
其中,b0,b3,b4按照公式(2)进行求解。
[0053]
步骤4,对步骤3所遍历计算的各个三角形相交面积进行累加得到两个多边形相交部分面积,即为再入飞行可达区域进入指定目标区域的面积;计算公式为:
[0054][0055]
其中,m、n分别为a、b两个多边形的顶点个数。
[0056]
本发明要解决的技术问题:本发明目的在于提供一种考虑球面形状(非平面二维图形上的)、计算耗时短、算法简洁有效且易于编程实现的航天器地面落点散布或着陆航行区所占预定落区的面积的计算方法。
[0057]
基于常用的矢量运算和面积矢量概念,结合球面三角形运算法则,来实现航天器地面落点散布或着陆航行区在预定区域内面积的计算。以逆时针排列的多边形顶点序列来表示再入飞行区域及事先指定的目标区域,对两个区域各选定一个点作为基准点;对再入飞行可达区域、事先指定的目标区域的球面多边形进行球面三角面片划分;
[0058]
遍历再入飞行可达区域多边形三角面片,对每一个面片,计算其与事先指定目标区域各面片的相交部分的有向球面面积;对各个三角面片相交区域有向面积进行累加得到总的相交部分面积。本发明的方法计算耗时短、算法简洁有效,且易于编程实现的航天器地面落点散布或着陆航行区所占预定落区的面积的计算。
[0059]
以上所述仅是本发明的计算方法、实施步骤等,应该指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。