1.本发明涉及计算机图像处理技术领域,尤其涉及一种检测核黄素在角膜中渗透深度的方法及装置。
背景技术:
2.角膜胶原交联术(corneal collagen cross-linking,cxl)是20世纪末提出并于 21世纪初应用于临床的最新的角膜成形技术,且被认为是现代眼科最重要的创新治疗之一。该技术是利用370nm波长的紫外线a照射感光剂核黄素,产生不稳定的活性氧离子来诱导角膜胶原纤维间产生共价键连接,以此提高角膜的机械强度,增强角膜生物力学稳定性及角膜抗扩张能力。
3.角膜交联疗法是近年来兴起的一种治疗圆锥角膜、准分子激光术后的角膜扩张及难治性角膜溃疡、角膜炎、角膜融解等角膜疾病的新疗法。但只有确保核黄素在角膜达到一定的渗透深度才能进行下一步的紫外线a照射,因此核黄素在角膜中的渗透深度称为手术成功的关键因素之一。
4.目前,很多厂家也都在研制不同成分的感光剂核黄素,用于提高其在角膜中的渗透速度和深度。但是,如何定性及定量其渗透深度也是一个新型研究课题,且现有技术中也缺乏相应的检测方法。
技术实现要素:
5.本发明实施例所要解决的技术问题在于,提供一种检测核黄素在角膜中渗透深度的方法及装置,能定量检测核黄素在角膜中的渗透深度,且直观准确。
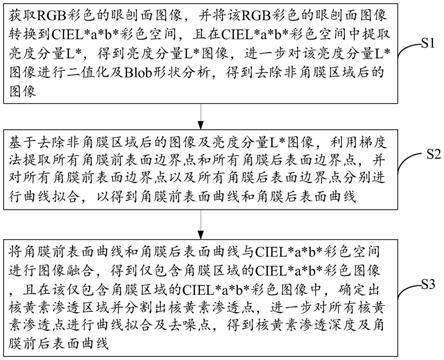
6.为了解决上述技术问题,本发明实施例提供了一种检测核黄素在角膜中渗透深度的方法,所述方法包括以下步骤:
7.步骤s1、获取rgb彩色的眼刨面图像,并将该rgb彩色的眼刨面图像转换到ciel*a*b*彩色空间,且在ciel*a*b*彩色空间中提取亮度分量l*,得到亮度分量l*图像,进一步对该亮度分量l*图像进行二值化及blob形状分析,得到去除非角膜区域后的图像;
8.步骤s2、基于去除非角膜区域后的图像及亮度分量l*图像,利用梯度法提取所有角膜前表面边界点和所有角膜后表面边界点,并对所有角膜前表面边界点以及所有角膜后表面边界点分别进行曲线拟合,以得到角膜前表面曲线和角膜后表面曲线;
9.步骤s3、将角膜前表面曲线和角膜后表面曲线与ciel*a*b*彩色空间进行图像融合,得到仅包含角膜区域的ciel*a*b*彩色图像,且在该仅包含角膜区域的ciel*a*b*彩色图像中,确定出核黄素渗透区域并分割出核黄素渗透点,进一步对所有核黄素渗透点进行曲线拟合及去噪点,得到核黄素渗透深度及角膜前后表面曲线。
10.其中,所述步骤s1中的rgb彩色的眼刨面图像是先通过cie-xyz颜色空间进行中转之后,再转换到ciel*a*b*彩色空间。
11.其中,cie-xyz颜色空间与rgb彩色空间的转换公式如下式(1)所示:
[0012][0013]
其中,ciel*a*b*颜色空间与cie-xyz颜色空间的转换关系如下式(2)所示:
[0014][0015][0016][0017]
其中,如果t》0.008856,否则f(t)=7.787*t;当采用cie 标准光源d65时,xn=94.81,yn=100.00,zn=107.304。
[0018]
其中,所述步骤s3具体包括:
[0019]
在去除非角膜区域后的图像上,以x轴中点为起点,找到对应的角膜前表面边界,并对应在亮度分量l*图像上拉线,且进一步结合梯度法,得到该拉线上的真实边界点为所有角膜前表面边界点;
[0020]
在去除非角膜区域后的图像上,以x轴中点为起点,找到对应的角膜后表面边界,并对应在亮度分量l*图像上拉线,且进一步结合梯度法,得到该拉线上的真实边界点为所有角膜后表面边界点;
[0021]
对所有角膜前表面边界点以及所有角膜后表面边界点均采用基于最小二乘法的多项式拟合,以得到角膜前表面曲线和角膜后表面曲线。
[0022]
其中,所述步骤s4具体包括:
[0023]
采用求最小值法,将角膜前表面曲线和角膜后表面曲线与ciel*a*b*彩色空间进行图像融合,得到仅包含角膜区域的ciel*a*b*彩色图像;
[0024]
在该仅包含角膜区域的ciel*a*b*彩色图像中,找到将角膜上下表面间分成两个部分的区域为核黄素渗透区域;
[0025]
采用k-mean聚类算法对核黄素渗透区域进行分割,得到核黄素渗透点;
[0026]
对所有核黄素渗透点进行曲线拟合及去噪点,得到核黄素渗透深度及角膜前后表面曲线
[0027]
其中,所述步骤s1中的rgb彩色的眼刨面图像是通过裂隙灯采集到的。
[0028]
本发明实施例还提供了一种检测核黄素在角膜中渗透深度的装置,包括:
[0029]
图像转换及分析单元,用于获取rgb彩色的眼刨面图像,并将该rgb彩色的眼刨面图像转换到ciel*a*b*彩色空间,且在ciel*a*b*彩色空间中提取亮度分量l*,得到亮度分量l*图像,进一步对该亮度分量l*图像进行二值化及 blob形状分析,得到去除非角膜区域后的图像;
[0030]
图像轮廊曲线拟合单元,用于基于去除非角膜区域后的图像及亮度分量l* 图像,利用梯度法提取所有角膜前表面边界点和所有角膜后表面边界点,并对所有角膜前表面边界点以及所有角膜后表面边界点分别进行曲线拟合,以得到角膜前表面曲线和角膜后表面曲线;
[0031]
核黄素渗透深度获取单元,用于将角膜前表面曲线和角膜后表面曲线与ciel*a*b*彩色空间进行图像融合,得到仅包含角膜区域的ciel*a*b*彩色图像,且在该仅包含角膜区域的ciel*a*b*彩色图像中,确定出核黄素渗透区域并分割出核黄素渗透点,进一步对所有核黄素渗透点进行曲线拟合及去噪点,得到核黄素渗透深度及角膜前后表面曲线。
[0032]
其中,rgb彩色的眼刨面图像是通过裂隙灯采集到的。
[0033]
实施本发明实施例,具有如下有益效果:
[0034]
本发明利用眼科中常用的裂隙灯进行采集眼刨面图像,然后将采集到的 rgb彩色图像转换到ciel*a*b*彩色空间,提取亮度分量l*进行二值化及blob 形状分析,以提取出包含角膜的区域,接着利用梯度法提取角膜前后表面的精细边界并分别进行曲线拟合,且进一步结合ciel*a*b*彩色空间融合成仅包含角膜区域的ciel*a*b*彩色图像,最后分割出角膜内部核黄素渗透点并进行曲线拟合及去噪点,得到核黄素渗透深度及角膜前后表面曲线,从而能通过图像处理方法直观精确的检测出核黄素在角膜中的渗透深度。
附图说明
[0035]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,根据这些附图获得其他的附图仍属于本发明的范畴。
[0036]
图1为本发明实施例提供的检测核黄素在角膜中渗透深度的方法的流程图;
[0037]
图2为本发明实施例提供的检测核黄素在角膜中渗透深度的方法的步骤s1 中rgb彩色的眼刨面图像、亮度分量l*图像、亮度分量l*图像二值化后图像及blob形状分析后图像的对比图;
[0038]
图3为图2中d图像局部放大图;
[0039]
图4为本发明实施例中角膜区域的ciel*a*b彩色图像;
[0040]
图5为本发明实施例提供的检测核黄素在角膜中渗透深度的装置的结构示意图。
具体实施方式
[0041]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。
[0042]
如图1所示,为本发明实施例中,提出的一种检测核黄素在角膜中渗透深度的方法,所述方法包括以下步骤:
[0043]
步骤s1、获取rgb彩色的眼刨面图像,并将该rgb彩色的眼刨面图像转换到ciel*a*b*彩色空间,且在ciel*a*b*彩色空间中提取亮度分量l*,得到亮度分量l*图像,进一步对该亮度分量l*图像进行二值化及blob形状分析,得到去除非角膜区域后的图像;
[0044]
步骤s2、基于去除非角膜区域后的图像及亮度分量l*图像,利用梯度法提取所有
角膜前表面边界点和所有角膜后表面边界点,并对所有角膜前表面边界点以及所有角膜后表面边界点分别进行曲线拟合,以得到角膜前表面曲线和角膜后表面曲线;
[0045]
步骤s3、将角膜前表面曲线和角膜后表面曲线与ciel*a*b*彩色空间进行图像融合,得到仅包含角膜区域的ciel*a*b*彩色图像,且在该仅包含角膜区域的ciel*a*b*彩色图像中,确定出核黄素渗透区域并分割出核黄素渗透点,进一步对所有核黄素渗透点进行曲线拟合及去噪点,得到核黄素渗透深度及角膜前后表面曲线。
[0046]
具体过程为,在步骤s1中,首先,利用眼科中常用的裂隙灯进行采集rgb 彩色的眼刨面图像。
[0047]
其次,由于颜色空间的选取对于彩色图像分割有着重要的意义,选择不同的颜色空间,实现分割的算法也有较大差异,因此采用最优的ciel*a*b*彩色空间。该彩色空间用三个分量表示颜色,其中,l*表示图像的亮度,a*表示从红色到绿色的范围,b*表示从黄色到蓝色的范围。
[0048]
ciel*a*b*颜色空间与rgb空间之间没有之间的转换,需要通过cie-xyz 颜色空间进行中转,cie-xyz颜色空间模型是基于人眼对色彩感知度量建立的颜色空间,它是几乎所有其它颜色空间模型的基础。cie-xyz模型将人眼看做是三基色(红、绿、蓝)接收器,所有的颜色感觉都被视为不同比例三基色“刺激”的结果。x、y、z分别被定义为相当于红、绿、蓝的三个刺激量(强度),取值范围都为[0,1]区间。因此,rgb彩色的眼刨面图像是先通过cie-xyz颜色空间进行中转之后,再转换到ciel*a*b*彩色空间。
[0049]
其中,当采用cie标准光源d65时,cie-xyz颜色空间与rgb彩色空间的转换公式如下式(1)所示:
[0050][0051]
cie-xyz颜色空间的主要问题是非匀色。如在色度图的绿色区间中,一个很大的色差对于人眼来说却是几乎没有变化的,而在紫色区间中的一个很小的色差就能感觉到明显的差别,不利于进行色差的标准衡量。于是,提出了均匀颜色空间模型ciel*a*b*来解决色差问题。
[0052]
所谓的均匀是指当数值均匀变化时,人的感官也是均匀变化的。而且 ciel*a*b*色彩空间中最大的一个特点是,两个颜色间的距离符合欧式空间距离,即距离小的像素点颜色差异小,距离大的像素点颜色差异大,这个特性为后续步骤的图像分割有着明显的优势。根据实际采集回来的图像特点,人眼可以清晰的分辨出角膜前后边界,以及当核黄素渗入角膜基质层时,角膜基质层的颜色变化,因此选择ciel*a*b*颜色空间可以满足需求。
[0053]
其中,ciel*a*b*颜色空间与cie-xyz颜色空间的转换关系如下式(2)所示:
[0054]
[0055][0056][0057]
其中,如果t》0.008856,否则f(t)=7.787*t;当采用cie 标准光源d65时,xn=94.81,yn=100.00,zn=107.304。
[0058]
接着,提取cie l*a*b*中l*分量,得到亮度分量l*图像。此时,可将该亮度分量l*图像看作普通8位的灰度图像处理。
[0059]
然后,进行灰度统计,以计算出二值化阈值,并根据该阈值进行二值化,的二值化后的图像。其中,一种方法可为:阈值=灰度均值 α*灰度方差。其中,α是根据不同时间及环境下所采集回的数张真实角膜图像,进行统计分析而获得的参数,其可为正数也可为负数。
[0060]
最后,对二值化后的图像进行blob形状分析,得到blob形状分析去除非角膜区域后的图像。由于角膜位于图像中间,而且贯穿图像左右,并且面积不会太小,根据以上面积及位置信息,利用blob形状分析即可排除非角膜区域。
[0061]
如图2所示,a为原始rgb图像,b为ciel*a*b*彩色空间中的亮度分量 l*图像,c为二值化后的图像,d为blob形状分析去除非角膜区域后的图像。
[0062]
在步骤s2中,首先,在步骤s1求得的去除非角膜区域后的图像(如图2 所示的d图像)上,以x轴(即角膜方向)中点为起点,找到对应的角膜前表面边界(如图3所示),并对应在亮度分量l*图像(如图2所示的b图像)上拉线,且进一步结合梯度法,得到线条上每个点的梯度跳变值,其中最大值所对应的点即为该拉线上的真实边界点,该边界点精度要高于二值化所得到的边界。然后沿着箭头方向移动,得到该拉线上的真实边界点为所有角膜前表面边界点。
[0063]
同理,在去除非角膜区域后的图像(如图2所示的d图像)上,以x轴(即角膜方向)中点为起点,找到对应的角膜后表面边界,并对应在亮度分量l*图像(如图2所示的b图像)上拉线,且进一步结合梯度法,得到线条上每个点的梯度跳变值,其中最大值所对应的点即为该拉线上的真实边界点,该边界点精度要高于二值化所得到的边界。然后沿着箭头方向移动,得到该拉线上的真实边界点为所有角膜后表面边界点。
[0064]
最后,对所有角膜前表面边界点以及所有角膜后表面边界点均采用基于最小二乘法的多项式拟合,以得到角膜前表面曲线和角膜后表面曲线,从而通过曲线拟合可以消除某些由于噪声引起的不精确边界点。应当说明的是,也可以采用其他方式的曲线拟合。
[0065]
在步骤s3中,首先,采用求最小值法,将角膜前表面曲线和角膜后表面曲线与ciel*a*b*彩色空间进行图像融合,得到仅包含角膜区域的ciel*a*b*彩色图像,如图4所示。
[0066]
其次,在该仅包含角膜区域的ciel*a*b*彩色图像中,找到将角膜上下表面间分成两个部分的区域为核黄素渗透区域。图4中,可以看到角膜上下表面间分成两个部分,显现的蓝色为感光剂核黄素的渗透结果。此时,由于是在 ciel*a*b*彩色空间,因此颜色间的差别和其颜色空间中各分量间的欧式距离成比例关系,即距离小的像素点颜色差异小,距离大的像素点颜色差异大。
[0067]
然后,采用k-mean聚类算法对核黄素渗透区域进行分割,得到核黄素渗透点。其中,k-mean聚类算法是最简单的一种聚类方法,就是通过迭代寻找k个聚类中心,将所有的数据分配到距离最近的聚类中心,使得每个点与其相应的聚类中心距离的平方和最小。本实例中仅为两种类别,即k=2。
[0068]
应当说明的是,也可采取拉线法(该方法更加精确,鲁棒性更高),如图4 中红色线条所示。该红色线条从角膜上表面垂直拉线到角膜下表面,仅对该拉线所对应的像素值运用k-mean算法,分割出最优的边界点即渗透点坐标。沿着黄色箭头方向左右移动红色线条,分别求出每一个位置的边界点坐标。
[0069]
最后,对所有核黄素渗透点进行曲线拟合及去噪点,得到核黄素渗透深度及角膜前后表面曲线。
[0070]
如图5所示,为本发明实施例中,提供的一种检测核黄素在角膜中渗透深度的装置,包括:
[0071]
图像转换及分析单元110,用于获取rgb彩色的眼刨面图像,并将该rgb 彩色的眼刨面图像转换到ciel*a*b*彩色空间,且在ciel*a*b*彩色空间中提取亮度分量l*,得到亮度分量l*图像,进一步对该亮度分量l*图像进行二值化及blob形状分析,得到去除非角膜区域后的图像;
[0072]
图像轮廊曲线拟合单元120,用于基于去除非角膜区域后的图像及亮度分量 l*图像,利用梯度法提取所有角膜前表面边界点和所有角膜后表面边界点,并对所有角膜前表面边界点以及所有角膜后表面边界点分别进行曲线拟合,以得到角膜前表面曲线和角膜后表面曲线;
[0073]
核黄素渗透深度获取单元130,用于将角膜前表面曲线和角膜后表面曲线与ciel*a*b*彩色空间进行图像融合,得到仅包含角膜区域的ciel*a*b*彩色图像,且在该仅包含角膜区域的ciel*a*b*彩色图像中,确定出核黄素渗透区域并分割出核黄素渗透点,进一步对所有核黄素渗透点进行曲线拟合及去噪点,得到核黄素渗透深度及角膜前后表面曲线。
[0074]
其中,rgb彩色的眼刨面图像是通过裂隙灯采集到的。
[0075]
实施本发明实施例,具有如下有益效果:
[0076]
本发明利用眼科中常用的裂隙灯进行采集眼刨面图像,然后将采集到的rgb彩色图像转换到ciel*a*b*彩色空间,提取亮度分量l*进行二值化及blob 形状分析,以提取出包含角膜的区域,接着利用梯度法提取角膜前后表面的精细边界并分别进行曲线拟合,且进一步结合ciel*a*b*彩色空间融合成仅包含角膜区域的ciel*a*b*彩色图像,最后分割出角膜内部核黄素渗透点并进行曲线拟合及去噪点,得到核黄素渗透深度及角膜前后表面曲线,从而能通过图像处理方法直观精确的检测出核黄素在角膜中的渗透深度。
[0077]
值得注意的是,上述装置实施例中,所包括的各个单元只是按照功能逻辑进行划分的,但并不局限于上述的划分,只要能够实现相应的功能即可;另外,各功能单元的具体名称也只是为了便于相互区分,并不用于限制本发明的保护范围。
[0078]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,所述的程序可以存储于一计算机可读取存储介质中,所述的存储介质,如rom/ram、磁盘、光盘等。
[0079]
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权
利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。