1.本发明涉及偏振图像融合技术,具体涉及一种基于均值滤波分解的形态选通偏振图像融合方法。
背景技术:
2.物体表面的反射光和散射光会包含其自身特性的偏振信息,通过这些偏振信息,可以反应被测物体的轮廓、纹理、粗糙度等物理信息。偏振度图像及偏振角图像分别根据目标表面偏振度及偏振角进行成像,可实现对目标边缘特征的增强,并对耀光、过曝等影响普通可见光强度图像的因素有较强的抑制作用,有着独特的目标探测能力。
3.为实现偏振角图像、偏振度图像、可见光强度图像信息的互补以及后续数据利用的便利,需要将上述三种图像进行融合为一。但偏振角图像、偏振度图像中噪声影响较大,尤其偏振角图像,噪声影响较为显著,使得融合过程中想要同时实现滤除噪声和保留源图像信息比较困难。
4.现有偏振图像融合算法可分为两类:第一类是只利用可见光强度图像和偏振度图像进行融合,噪声影响较大的偏振角图像不参与融合。这类融合方法得到的融合图像信噪比较高,但也同样丢失了偏振角图像中包含的有效信息。第二类是将偏振角图像、偏振度图像、可见光强度图像三者进行融合。这类方法可实现三种源图像信息的融合,但在噪声抑制及信息保留两种目标之间未实现有效的均衡。要么未对偏振角图像中较强的噪声进行有效处理,造成融合图像信噪比较低,要么抑制了噪声,同时保留的有效信息也较少。
技术实现要素:
5.本发明目的是解决现有偏振角图像、偏振度图像、可见光强度图像三者进行融合时偏振角图像参与度不高,未能有效利用偏振角图像信息以及偏振角图像参与度高的方法中其偏振角图像较强的噪声未得到有效处理,造成融合图像信噪比较低的技术问题,而提供一种基于均值滤波分解的形态选通偏振图像融合方法。本发明利用均值滤波将图像分解为轮廓图像及细节图像,通过形态开运算进行选通,确定区域是否参与细节图像融合,可有效滤除偏振信息图像中的噪声,实现偏振角图像、偏振度图像、可见光强度图像的高质量融合,本发明计算简单,实时性高,有着较高的实用价值。
6.本发明技术方案为:
7.一种基于均值滤波分解的形态选通偏振图像融合方法,其特殊之处在于,包括以下步骤:
8.s1)对可见光强度源图像s、偏振度源图像d、偏振角源图像a进行窗口大小为m
×
n的均值滤波,得到模糊化的轮廓图像sf、df、af,而后利用源图像灰度值减去对应的轮廓图像灰度值得到可见光强度细节图像sd、偏振度细节图像dd、偏振角细节图像ad;
9.sd=s-sf10.dd=d-df11.ad=a-af12.s2)对偏振度源图像、偏振角源图像进行形态开运算;而后将形态开运算后的偏振度源图像各像素点灰度值、偏振角源图像各像素点灰度值分别与形态开运算前的偏振度源图像像素点灰度均值、偏振角源图像像素点灰度均值进行比较,小于灰度均值置0,大于灰度均值置1,得到偏振度细节图像选通区域模板d
opened
、偏振角细节图像选通区域模板a
opened
;
13.s3)对步骤s1)得到的可见光强度源图像、偏振度源图像和偏振角源图像的轮廓图像灰度值采用加权均值法进行加权求和得到融合轮廓rf;
14.rf=λ1sf λ2df λ3af15.式中,λ1,λ2,λ3分别为可见光强度源图像、偏振度源图像和偏振角源图像的轮廓图像在融合图像中的权重;
16.所述λ1,λ2,λ3均不为0,且λ1 λ2 λ3=1,λ2=λ3,λ1为0.5~0.6。
17.s4)先对步骤s1)得到的偏振度细节图像dd、偏振角细节图像ad通过步骤s2)得到的选通区域模板进行选通;再对选通后的偏振度细节图像灰度值、偏振角细节图像灰度值与步骤s1)得到的可见光强度细节图像灰度值进行求和得到融合细节rd;
18.rd=sd d
opened
×dd
a
opened
×ad
19.s5)将步骤s3)得到的融合轮廓rf灰度值与步骤s4)得到的融合细节rd灰度值相加得到最终的融合图像r:
20.r=rf rd。
21.进一步地,步骤s1)中,所述窗口大小m
×
n为30像素*30像素;步骤s2)中,所述形态开运算的窗口为圆形,半径为7个像素;步骤s3)中,所述λ1,λ2,λ3分别为0.5,0.25,0.25。
22.本发明的有益效果:
23.1、本发明利用均值滤波将图像分解为轮廓图像及细节图像,通过形态开运算进行选通,确定区域是否参与细节图像融合,可有效滤除偏振信息图像中的噪声,实现偏振角图像、偏振度图像、可见光强度图像的高质量融合。
24.2、本发明能够较好的保留三种源图像的重要特征信息并对图像噪声有较好的抑制作用,实现了融合图像的高质量表达。
25.3、本发明计算简单,实时性高,有着较高的实用价值。
附图说明
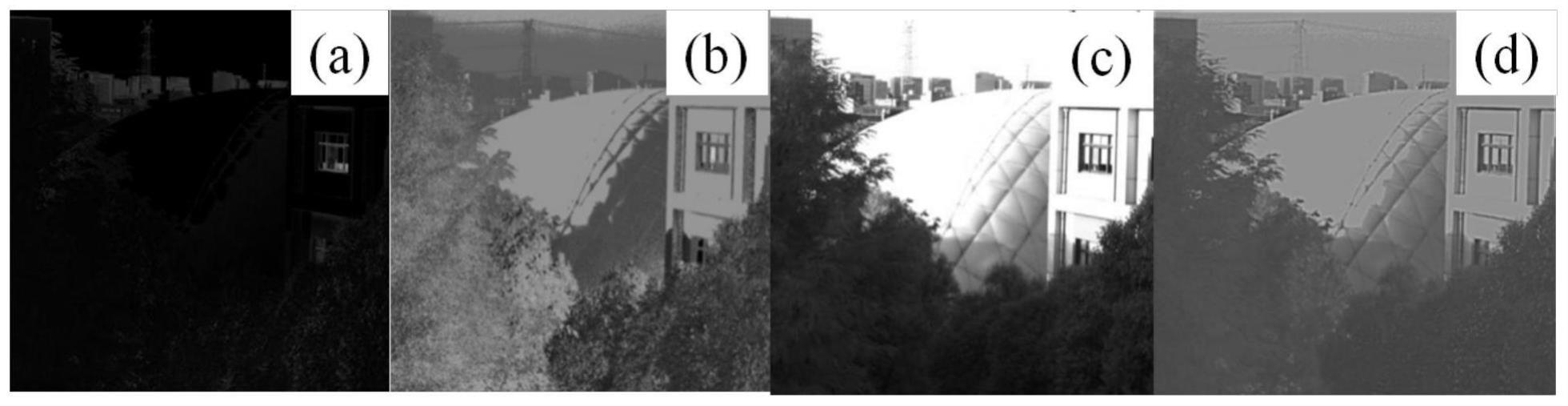
26.图1为实施例的三种源图像及采用本发明方法处理后的融合图像(a:偏振度源图像,b:偏振角源图像,c:可见光强度源图像,d:融合图像);
27.图2为实施例的偏振角选通模板;
28.图3为实施例的偏振度选通模板。
具体实施方式
29.下面通过实施例和附图对本发明进行详细的描述。
30.一种基于均值滤波分解的形态选通偏振图像融合方法,包括以下步骤:
31.s1)对同一场景的可见光强度源图像s、偏振度源图像d、偏振角源图像a进行窗口
大小为m
×
n的均值滤波,得到模糊化的轮廓图像sf、df、af。本例中窗口为30像素*30像素。而后利用各源图像灰度值减去各自的轮廓图像灰度值得到可见光强度细节图像sd、偏振度细节图像dd、偏振角细节图像ad,实现将源图像分解为轮廓图像及细节图像的目的。
32.sd=s-sf33.dd=d-df34.ad=a-af35.s2)对偏振度源图像、偏振角源图像进行形态开运算,为较好的区分源图像中目标部分与噪声部分,开运算窗口一般取圆形,半径为7~10个像素。本例中取开运算窗口为圆形,半径为7个像素。而后将形态开运算后的偏振度源图像各像素点灰度值、偏振角源图像各像素点灰度值分别与形态开运算前的偏振度源图像像素点灰度均值、偏振角源图像像素点灰度均值进行比较,小于灰度均值置0,大于灰度均值置1,得到偏振度细节图像选通区域模板d
opened
、偏振角细节图像选通区域模板a
opened
;
36.s3)对步骤s1)得到的可见光强度源图像、偏振度源图像和偏振角源图像的轮廓图像灰度值采用加权均值法进行加权求和得到融合轮廓rf。
37.rf=λ1sf λ2df λ3af38.式中,λ1,λ2,λ3分别为可见光强度源图像、偏振度源图像和偏振角源图像的轮廓图像在融合图像中的权重;λ1,λ2,λ3均不为0,且λ1 λ2 λ3=1,λ2=λ3,λ1为0.5~0.6。可见光强度源图像的轮廓一般较为丰富,故融合图像轮廓以可见光轮廓图像为主要框架,偏振度轮廓图像及偏振角轮廓图像进行补充。本实施例中λ1,λ2,λ3分别取0.5,0.25,0.25。
39.s4)先对步骤s1)得到的偏振度细节图像dd、偏振角细节图像ad通过步骤s2)得到的选通区域模板进行选通;再对选通后的偏振度细节图像灰度值、偏振角细节图像灰度值与步骤s1)得到的可见光强度细节图像灰度值进行求和得到融合细节rd;
40.rd=sd d
opened
×dd
a
opened
×ad
41.s5)将步骤s3)得到的融合轮廓rf灰度值与步骤s4)得到的融合细节rd灰度值相加得到最终的融合图像r:
42.r=rf rd。
43.如图1所示,为室外同一远景的三种源图像及采用本发明方法的融合图像(a:偏振度源图像,b:偏振角源图像,c:可见光强度源图像,d:融合图像)。偏振度源图像a,由于玻璃镜面的强偏振反射,偏振程度显著,造成图像局部亮度高,整体亮度较低,近处树木细节已无法分辨,但对楼房、窗口等目标的边缘反应较好;偏振角源图像b的噪声较大,树木处噪声尤其显著,但对远处电线及楼宇窗口可清晰感知;可见光强度源图像c,远处天空出现过曝情况,电线处已经无法分辨,但近处树木边缘较清晰。上述三种源图像经过本发明融合算法处理后得到融合图像d,融合图像对偏振角源图像中的噪声进行了有效选通抑制,而且树木、楼房、窗口、远处电线等目标的有效信息经过融合均得到有效保留。证明本方法可有效实现对融合图像噪声滤除及信息保留的目标。融合处理过程中只包含均值滤波、形态开运算以及加减乘除等基础运算,计算简单,实时性较好。
44.如图2所示,根据偏振角选通模板a
opened
可知,偏振角源图像中信息表达较好的楼房及远处电线处均参与了图像融合,噪声较大的树木部分未参与融合(选通模板亮处参与融合,暗处滤除不参与融合)。
45.如图3所示,根据偏振度选通模板d
opened
可知,偏振度源图像中信息表达较好的楼房、窗口等目标边缘均参与了图像融合,源图像中对比度较低部分未参与融合(选通模板亮处参与融合,暗处滤除不参与融合)。
46.本发明利用均值滤波将源图像分解为轮廓图像及细节图像,通过形态开运算进行选通,确定区域是否参与细节图像融合,可有效滤除偏振信息图像中的噪声,实现偏振角图像、偏振度图像、可见光强度图像的高质量融合,且本发明能够较好的保留三种源图像的重要特征信息实现了融合图像的高质量表达。本发明计算简单,实时性高,有着较高的实用价值。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。