永磁体同步机的实时电阻估计和调整
1.相关专利申请
2.本专利申请要求2019年9月12日提交的美国临时专利申请第62/899,349号的优先权,该专利申请的内容据此全文并入本文。
技术领域
3.本公开涉及马达控制,并且更具体地涉及永磁体同步机的实时电阻估计和调整。
背景技术:
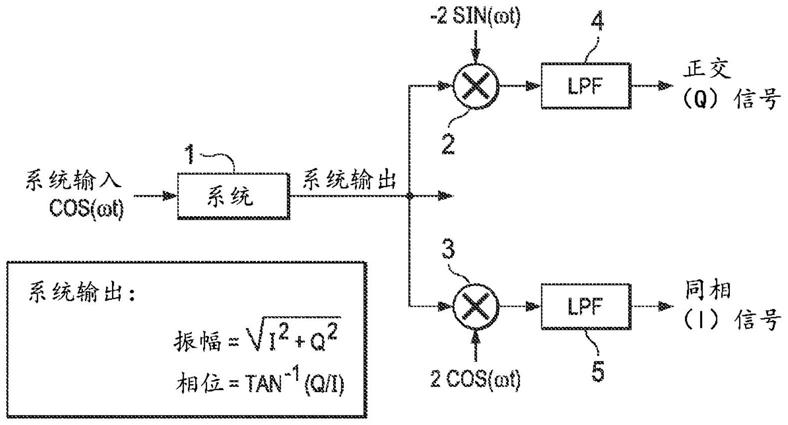
4.一对周期信号在它们相位相差90度时被称为“正交”并且在它们相位相差零度时被称为“同相”。已经角度调制的正弦曲线可以分解成两个经振幅调制的正弦曲线,这两个经振幅调制的正弦曲线相位偏移四分之一周期(π/2弧度)。原始正弦曲线和经调制的正弦曲线可以具有相同的频率。经振幅调制的正弦曲线可以称之为相对于彼此正交的同相与正交(iq)分量。
5.图1是执行iq解调的框图的图示。控制系统1可以接受系统输入。输入到控制系统1的系统输入可以具有形式cos(ωt)。控制系统1的输出可以提供到第一倍增器2和第二倍增器3。控制系统1提供到第一倍增器2的输出可以乘以-2sin(ωt)。结果可以应用于低通滤波器4。来自低通滤波器4的结果可以是控制系统1的输出的正交(q)部分。控制系统1提供到第二倍增器3的输出可以乘以2cos(ωt)。结果可以应用于低通滤波器5。来自低通滤波器5的结果可以是控制系统1的输出的同相(i)部分。
6.控制系统1的输出的振幅可以给出为
7.(方程1)
8.并且控制系统1的输出的相位可以给出为
9.(方程2)
10.马达的特性可以改变。例如,马达的定子电阻可以随温度而改变。本公开的实施方案的发明人已发现用于使用iq信号实时动态估计马达的此类特性并且作为响应进行调整的系统和方法。
技术实现要素:
11.本公开的实施方案包括一种定子电阻计算电路。该定子电阻计算电路包括模拟电路、数字电路、用于由处理器执行的指令或它们的任何合适的组合,以通过向马达发出的控制信号向该马达引入扰动信号。该马达可以被配置为以角速度和操作电流操作。该马达可以被配置为基于这些控制信号来操作。该定子电阻计算电路可以被配置为:观察该马达响应于该扰动信号的操作;基于该马达响应于该扰动信号的这些操作的观察结果来估计该马达的定子电阻;并且提供改变的定子电阻以调整该马达的操作。
12.本公开的实施方案包括系统。该系统可以包括被配置为以角速度和操作电流操作
的马达、被配置为向该马达发出控制信号的马达控制器电路以及定子电阻计算电路。该定子电阻计算电路可以被配置为:通过由该马达控制器电路发出的这些控制信号向该马达引入扰动信号;观察该马达响应于该扰动信号的操作;基于该马达响应于该扰动信号的这些操作的观察结果来估计该马达的定子电阻;并且基于改变的定子电阻来调整该马达的操作。
13.本公开的实施方案包括一种方法。该方法包括:以角速度和操作电流操作马达;向该马达发出控制信号;通过这些控制信号向该马达引入扰动信号;观察该马达响应于该扰动信号的操作;基于该马达响应于该扰动信号的这些操作的观察结果来估计该马达的定子电阻;以及基于改变的定子电阻来调整该马达的操作。
附图说明
14.图1是执行iq解调的框图的图示。
15.图2是根据本公开的实施方案的用于执行马达电阻的实时估计的示例性系统的图示。
16.图3是根据本公开的实施方案的系统的各部分(诸如控制器)的更详细图示。
17.图4是根据本公开的实施方案的示例性马达的低频增益的图示。
18.图5是根据本公开的实施方案的系统(包括计算电路)的更详细图示。
19.图6是根据本公开的实施方案的考虑交叉耦合效应的系统的各部分(包括计算电路)的更详细图示。
20.图7是根据本公开的实施方案的用于估计定子电阻的方法的图示。
具体实施方式
21.本公开的实施方案包括一种定子电阻计算电路。该定子电阻计算电路包括模拟电路、数字电路、用于由处理器执行的指令或它们的任何合适的组合,以通过向马达发出的控制信号向该马达引入扰动信号。该马达可以被配置为以角速度和操作电流操作。该马达可以被配置为基于这些控制信号来操作。该定子电阻计算电路可以包括模拟电路、数字电路、用于由处理器执行的指令或它们的任何合适的组合,以观察该马达响应于该扰动信号的操作,基于该马达响应于该扰动信号的这些操作的观察结果来估计该马达的定子电阻,并且提供改变的定子电阻以调整该马达的操作。该马达可以是任何合适的机电马达。经估计的定子电阻可以以任何合适的方式(诸如通过寄存器)存储。该定子电阻计算电路可以包括模拟电路、数字电路、用于由处理器执行的指令或它们的任何合适的组合,以在添加该扰动信号之前和之后评估该马达的该响应。该响应可以包括由施加该扰动信号产生的增益。可以通过以下使用iq解调以凭借以下所讨论方程中的任何方程来评估增益:将扰动信号乘以输入到马达中的输入以产生输入(其为电流id),将扰动信号乘以来自马达104的输出(其为电压vd),以及将输出乘积除以输入乘积。结合上述实施方案中的任一个实施方案,该定子电阻计算电路可以包括模拟电路、数字电路、用于由处理器执行的指令或它们的任何合适的组合,以通过调整扰动信号考虑交叉耦合效应。
22.结合上述实施方案中的任一个实施方案,该定子电阻计算电路可以包括模拟电路、数字电路、用于由处理器执行的指令或它们的任何合适的组合,以进一步基于扰动增益
的计算来估计马达的定子电阻,该扰动增益包括马达的输出与马达的输入的比率。
23.结合上述实施方案中的任一个实施方案,该定子电阻计算电路可以包括模拟电路、数字电路、用于由处理器执行的指令或它们的任何合适的组合,以通过以下方式来确定扰动增益:将从马达观察到的操作电流的d轴分量与正弦信号相乘以产生马达的输出;以及将输入到马达中的电压输入的d轴分量与正弦信号相乘以产生马达的输入。
24.结合上述实施方案中的任一个实施方案,该定子电阻计算电路可以包括模拟电路、数字电路、用于由处理器执行的指令或它们的任何合适的组合,以进一步基于从扰动增益的倒数减去因子来估计马达的定子电阻,该因子包括定子电感、电频率和标称定子电阻的定量。
25.结合上述实施方案中的任一个实施方案,该定子电阻计算电路可以包括模拟电路、数字电路、用于由处理器执行的指令或它们的任何合适的组合,以进一步通过针对交叉耦合效应调整马达的输出来估计马达的定子电阻。
26.本公开的实施方案可以包括系统。该系统可以包括上述实施方案的该定子电阻计算电路中的任一个定子电阻计算电路。该系统可以包括:马达,该马达被配置为以角速度和操作电流操作。该系统可以包括:马达控制器电路,该马达控制器电路包括模拟电路、数字电路、用于由处理器执行的指令或被配置为向马达发出控制信号的它们的任何合适的组合。该马达控制器电路可以包括模拟电路、数字电路、用于由处理器执行的指令或被配置为将马达的输出或马达的性能与参考值比较的它们的任何合适的组合。参考值可以是速度或电流。控制信号可以是电压。电压可以在q轴或d轴中。
27.结合上述实施方案中的任一个实施方案,正弦信号可以是扰动信号。
28.结合上述实施方案中的任一个实施方案,该定子电阻计算电路可以包括模拟电路、数字电路、用于由处理器执行的指令或它们的任何合适的组合,以通过将扰动信号添加到马达控制器电路的输出端来通过由马达控制器电路发出的控制信号向马达引入扰动信号。
29.结合上述实施方案中的任一个实施方案,该定子电阻计算电路可以包括模拟电路、数字电路、用于由处理器执行的指令或它们的任何合适的组合,以通过将扰动信号添加到马达控制器电路的输入端来通过由马达控制器电路发出的控制信号向马达引入扰动信号。
30.本公开的实施方案可以包括由上述实施方案的电路或系统中的任一者执行的方法。这些方法可以通过其中的电路操作或由处理器执行指令或它们的任何组合来执行。
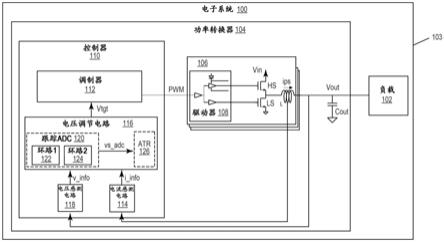
31.图2是根据本公开的实施方案的用于执行马达电阻的实时估计的示例性系统100的图示。系统100可以被配置为执行部件的调整以用于控制马达。系统100可以被配置为执行调整以用于控制任何合适的马达,诸如永磁体同步马达。
32.为了执行马达的电阻的实时估计,系统100可以包括定子电阻计算电路(srcc)102。srcc 102可以以任何合适的方式(诸如模拟电路、数字电路、用于由处理器(未示出)执行的指令或它们的任何组合)来实现。尽管示出为单个实体,但是srcc 102可以通过元件、零件或模块的任何合适的组合来实现。srcc 102可以被配置为估计任何合适的马达(诸如马达104)的电阻。
33.马达104可以以任何合适的方式实现。例如,马达104可以是永磁体同步马达。马达
104可以包括定子电阻。定子电阻可以由定子绕组产生。此外,定子电阻可以随温度而增加。尽管被简单地描述为马达,但是马达104还可以包括归于马达104用于控制目的的相关操作的各种部件,诸如马达本身、功率晶体管、电流感测电阻器、互连器和其他支撑机构。
34.srcc 102可以被配置为估计马达104的电阻并且将定子电阻的调整值存储在定子电阻寄存器106中。尽管被描述为寄存器,但定子电阻寄存器106可以以任何合适的方式实现。定子电阻寄存器106可以被配置为存储马达104的定子电阻的值。定子电阻寄存器106可以最初填充有来自设计特性、制造测试或验证、系统100的用户或软件或马达104中的传感器的值。定子电阻寄存器106可以被配置为由srcc 102在任何合适的时间或以任何合适的间隔更新。例如,srcc 102可以被配置为在以下情况下更新定子电阻寄存器106:周期性地;每天一次;每使用马达104数分钟、数秒钟或数小时一次;在系统100的用户或软件要求时;或在马达104的操作启动时。srcc 102可以被配置为在明确指定的诊断模式下或在马达104的其他正常操作期间更新定子电阻寄存器106。在一个实施方案中,srcc 102可以被配置为在不使用测量马达104内的热量或温度的传感器的情况下更新定子电阻寄存器106。
35.定子电阻寄存器106可以由系统100的任何合适的部分用于控制马达104的操作。例如,马达104的操作可以由控制器108控制。控制器108可以由模拟电路、数字电路、由处理器执行的指令或它们的任何合适的组合来实现。控制器108可以包括锁相环(pll)、比例积分微分(pid)控制或任何其他合适的控制部件。控制器108可以被配置为使用来自定子电阻寄存器106的数据以及其他变量,以将马达104的操作控制为处于给定速度。这种速度可以由参考值110限定。参考值110可以是对马达104操作将处于的目标速度的指定。参考值110可以由任何合适的实体(诸如由系统100的软件、硬件或用户)设定。
36.任何合适的反馈配置可以用于控制马达104的速度。例如,马达104的输出的指示可以反馈作为输入到加法器112的负输入。此类指示可以包括定子电流和操作速度的指示。加法器112还可以接受参考值110作为正输入。加法器112的输出可以发送到控制器108。因此,控制器108可以接收参考值110和马达104的输出之间的误差的指示。控制器108可以调整其输出到马达104的输出,以试图致使马达104更准确地操作。具体地,控制器108可以被配置为调整其输出到马达104的输出,以减小参考信号和所测量信号之间的误差(诸如参考值110或其电流表示和从马达104测量的速度或电流之间的差值)。
37.在一个实施方案中,srcc 102可以被配置为通过向控制马达104的控制回路引入扰动信号来估计定子电阻。在引入扰动信号之后,srcc 102可以观察引入扰动信号的结果,并且这些结果可以位于马达104的任何合适的部分中。例如,可以在马达104的输出端、马达104的输入端、控制器108的输入端或控制器108的输出端处观察引入扰动信号的结果。srcc102可以被配置为通过向控制马达104的控制回路的任何合适的部分引入扰动信号来估计定子电阻。在另一个实施方案中,srcc 102可以被配置为通过引入扰动信号116作为输入到控制器108中的部件的正或负输入、通过在加法器114的输入端处引入扰动信号116来估计定子电阻,应当理解,在另一个实施方案中,扰动信号116可以通过向控制器108引入扰动信号116在加法器304的输入端处引入,这在下文进一步详细讨论。
38.srcc 102可以被配置为接收用于观察向控制马达104的控制回路引入扰动信号的结果的任何合适的输入。例如,srcc 102可以被配置为接收马达104的输出的指示、对马达104的输入的指示、控制器108的输入的指示(未示出)、控制器108的输出的指示或参考值
110的指示(未示出)。此外,控制器108可以被配置为接收马达104的输出的指示。
39.图3是根据本公开的实施方案的系统100的各部分(诸如控制器108)的更详细图示。在系统100中,马达104的输出的指示被示出为分解为提供到加法器112的速度(ω)310和提供到控制器108的电流(id,iq)308。这两个输出也可以被提供到srcc 102,因为马达104的输出的指示被提供到srcc 102,如图2所示。控制器108的输出可以给出为马达输入314,并且可以包括d分量vd和q分量vq。
40.控制器108可以包括逻辑块302、306。逻辑块302、306可以以任何合适的方式(诸如由模拟电路、数字电路、由处理器执行的指令或它们的任何组合)来实现。逻辑块302(也表示为k
ω
)可以被配置为操作为速度控制器。逻辑块302(作为k
ω
)可以是动态控制器,该动态控制器具有安培/弧度或电流/频率的输出输入单位。鉴于由加法器112计算的非零误差作为输入,逻辑块302可以被配置为调整或校正马达104的速度。逻辑块302可以包括根据电流限定的输出。例如,如果马达104的输出为每秒101弧度,参考值110为每秒100弧度,并且扰动信号116为零,则加法器112的输出是速度差值,并且因此输入到控制器108的输入可为每秒一弧度。逻辑块302可以将输入到控制器108的输入乘以确定因子(k
ω
),或以其他方式提供每秒一弧度输入的传递函数。逻辑块302的输出可以被提供到加法器304,该加法器可以被配置为找出马达104使用的电流的误差。加法器304可以接受逻辑块302的输出作为正输入并且接受马达104的输出的指示(在特定实施方案中,电流分量id、iq的指示)作为负输入。由加法器304确定的误差可以被提供到逻辑块306。由加法器304确定的误差可以表示实现参考值110所需的电流和马达104实际使用的电流之间的差值。逻辑块306(也表示为ki)可以被配置为操作为电流控制器。鉴于马达104要使用的电流的差值,逻辑块306可以被配置为将这种电流差值转换为马达104要使用的一个或多个电压。逻辑块306可以将传递函数应用于其输入,或者将其输入倍乘因子以产生其输出。在控制器108中,逻辑块302、逻辑块306或逻辑块302、306两者可以使用定子电阻寄存器106(未示出)来确定它们的输出。例如,逻辑块302、306使用的特定系数可以结合存储在定子电阻寄存器106中的定子电阻的值。
41.返回到图2,在一个实施方案中,可以使扰动信号116、118中的一个或多个扰动信号处于低于控制器108或马达104的极点/零点频率的频率。在另一个实施方案中,srcc 102可以被配置为:使用iq解调来定量扰动信号在系统的输入端和输出端处的量值,通过采用输出/输入信号的比率来计算系统的低频增益,并且将低频增益与模型进行比较。定子电阻的精确值的计算在时间或处理资源方面可能是不切实际的。因此,在另一个实施方案中,为了高效地控制马达104,srcc 102可以被配置为估计但不一定精确计算定子电阻。因此,存储在定子电阻寄存器106中的定子电阻的值可以表示定子电阻的估计值,而不表示真实测量值。
42.马达104产生的电流的变化可以由以下项给出:下列状态空间方程
43.(方程3)
44.和下列直流(dc)增益方程
45.(方程4)
46.其中rs是定子电阻,ls是定子电感的定量,ωe是电频率的定量,ωm是机械频率,ke是反emf常数,vd是d轴电压,vq是q轴电压,id是d轴电流,并且iq是q轴电流。
47.图4是根据本公开的实施方案的示例性马达的低频增益的图示。示出了是从d轴电压到d轴电流的传递函数的波特图,其针对不同的频率在纵坐标上以db为单位表示。马达可以是例如hurst dma0204024b101clb1617马达。如图所示,在较低频率(诸如小于100赫兹的频率)下,增益相对恒定。波特图的突出显示部分的增益可以给出为
48.(方程5)
49.根据在低频率下的增益,srcc 102可以被配置为估计定子电阻rs。例如,dc增益(g
dc
)可以给出为
50.(方程6)
51.并且因此
52.(方程7)
53.从而导致rs大约等于由定子电感和电频率动态限定的值,其给出为
54.(方程8)
55.其中1/γ是低频跨阻增益(vd/id),并且r
s标称
是rs的值在特定操作温度或其他指定组的操作条件下的定量。
56.返回到图2,srcc 102可以被配置为使用方程8来估计定子电阻值。可以在不需要处理器的情况下使用电路计算方程8。srcc 102可以被配置为发出扰动信号116、118中的至少一个扰动信号。为了计算低频增益(即g
dc
),可以假设从马达104的输入端到马达104的输出端不存在相位延迟。如果不存在相位延迟,则可以计算马达104输出信号的同相分量,并且未使用信号的正交分量。
57.因此,srcc 102可以被配置为发出扰动信号116、118中的一个扰动信号,观察结果,并且使用扰动信号、结果和方程8来确定定子电阻。
58.图5是根据本公开的实施方案的系统100(包括srcc 102)的更详细图示。
59.扰动信号116、118可以呈任何合适的形式、频率、振幅和相位。例如,扰动信号116、118可以是正弦信号,诸如具有0.1伏特(v)或安培(a)振幅和1hz频率的正弦函数。如下文图3所示,施加到元件112的扰动信号116可以以安培表示。施加到元件114的扰动信号118可以以伏特为单位表示。因此,srcc 102可以包括正弦产生电路502。正弦产生电路502可以由模拟电路、数字电路、由处理器执行的指令或它们的任何组合的任何合适的组合来实现。正弦产生电路502可以被配置为产生正弦波信号,该正弦波信号具有根据正弦产生电路的输入的频率和振幅,这对于振幅可为0.1v,并且对于频率可为1.0hz。正弦产生电路502的输出可以用于扰动信号116或扰动信号118。可以基于设计、用户选择、设定或其他合适的标准来选
择要在系统100中使用扰动信号116还是扰动信号118。
60.srcc 102可以被配置为评估所产生的扰动信号在系统100中的影响。srcc 102可以被配置为通过确定由施加扰动信号116或扰动信号118产生的增益来这样评估此类效果。可以通过以下使用iq解调来评估增益:将扰动信号116或扰动信号118乘以输入到马达104中的输入以产生输入(其为电流id),将扰动信号116或扰动信号118乘以来自马达104的输出(其为电压vd),以及将输出乘积除以输入乘积。然后可以在方程8中使用此类增益来确定定子电阻。
61.例如,电流测量值308可以输入到srcc 102中。电流测量值308可以使用信号调节电路502来调节。信号调节电路502可以由模拟电路、数字电路、由处理器执行的指令或它们的任何组合的任何合适的组合来实现。信号调节电路502可以被配置为以任何合适的方式格式化电流测量值308,以便使其能够用于srcc 102中的其他操作或者与这些操作兼容。例如,信号调节电路502可以被配置为改变用于表示电流测量值308的数据结构(诸如从具有较低位数的整数或实际数字改变为具有较高位数的整数或实际数字),或者将线性固定增益应用于电流测量值308。
62.信号调节电路502的输出可以通过倍增器504乘以扰动信号116或扰动信号118。倍增器504的结果可以被提供到低通滤波器506。低通滤波器506的输出可以被指定为pert_out,并且可以是d轴电流id在扰动频率下的同相分量。
63.马达输入314可以输入到srcc 102中。可以利用加法器508将马达输入314添加到扰动信号。加法器508的结果可以使用信号调节电路510来调节。信号调节电路510可以由模拟电路、数字电路、由处理器执行的指令或它们的任何组合的任何合适的组合来实现。信号调节电路510可以被配置为以任何合适的方式格式化电流马达输入314和扰动信号116或扰动信号118的总和,以便使其能够用于srcc 102中的其他操作或者与这些操作兼容。例如,信号调节电路510可以被配置为改变用于表示加法器508的结果的数据结构(诸如从具有较低位数的整数或实际数字改变为具有较高位数的整数或实际数字),或者将线性固定增益应用于加法器508的结果。
64.另选地,利用加法器114的结果输入到马达104中的输入可以输入到srcc 102,如图1所示。在这种情况下,可能不需要利用加法器508将这种输入添加到扰动信号116或扰动信号118。这种输入可能直接提供到信号调节电路510。
65.信号调节电路510的输出可以通过倍增器512乘以扰动信号116或扰动信号118。倍增器512的结果可以被提供到低通滤波器514。低通滤波器514的输出可以被指定为pert_in,并且可以是d轴电压vd。
66.srcc 102可以被配置为确定与扰动信号相关联的增益,其通过计算pert_out/pert_in确定,并且给出为γ。可以通过除法块516将pert_out除以pert_in以产生γ来计算增益。结果可以通过倒数块522变为倒数以产生1/γ。在另一个具体实施中,输入到除法块516的输入可以变为倒数,并且可能不使用倒数块522以便简单地产生1/γ。此结果继而可以通过等于的因子518缩小。因子518可以被计算出或存储为已知值。因子518中的频率可以是1hz或正弦产生电路502使用的另一个频率。结果(其为方程8的结果)可以存储在定子电阻寄存器106中。
67.一旦已更新定子电阻寄存器106,系统100就可以采取任何适当的校正动作。例如,控制器108可以调整用于控制马达104的操作、警示系统100的软件或用户、估计马达104的温度或记录改变的数据的系数。经估计的定子电阻可用于更新控制器参数,诸如逻辑块306中的ki。经估计的定子电阻可用于估计马达温度,其与定子电阻有关。如果马达温度太热,则可以关闭马达的操作,或降低操作速度。如果估计出大电阻,则可以诊断故障并且关闭马达。
68.将扰动信号116或118施加到系统100可以引起主要在d轴中如上所讨论进行评估的反应或扰动。然而,将扰动信号116或118施加到系统100同样也可以引起在q轴中的反应或扰动。q通道中的这些反应或扰动可以有助于d轴输出。这可以是交叉耦合的形式。交叉耦合效应可以很小。以上用于估计定子电阻的方程可以忽略这种交叉耦合效应。然而,在另一个实施方案中,当估计定子电阻时,可以考虑交叉耦合效应。
69.图6是根据本公开的实施方案的考虑交叉耦合效应的系统100的各部分(包括srcc 102)的更详细图示。srcc 102可以包括交叉耦合调整电路(ccac)530。在一个实施方案中,srcc 102可能不包括ccac 530,并且因此不考虑交叉耦合效应,其中来自低通滤波器506的输出作为pert_out输入到除法块516中。在另一个实施方案中,srcc 102可能包括ccac 530,并且因此考虑交叉耦合效应。在这种情况下,ccac 530可以采用来自低通滤波器506的输入,并且通过调整从低通滤波器506接收的输入来产生pert_out作为输出到除法块516的输出。在另一个实施方案中,srcc 102可能包括ccac 530,但不启用ccac 530,并且因此不考虑交叉耦合效应。在这种情况下,交换装置或其他合适的机制可以用于路由来自低通滤波器506的输出,并且不变地产生此类输出作为pert_out输出到除法块516。
70.在图6的示例中,可以在ccac 530处从低通滤波器506、来自逻辑块306的vq和扰动信号116/118接收输入。ccac 530可以被配置为通过确定作为pert_out_cc引用的校正因子来考虑交叉耦合效应。可以从低通滤波器506的输出减去pert_out_cc,其在不存在ccac 530的情况下将是pert_out。任何合适的具体实施可用于计算pert_out_cc,诸如数字电路、模拟电路、由处理器执行的指令或它们的任何合适的组合。
71.例如,pert_out_cc可以通过以下来确定:采用输入到马达104的q轴电压输入vq,以及利用倍增器532将vq乘以扰动信号116/118,然后通过增益块534将结果与标称交叉耦合增益γ
cc
相乘。标称交叉耦合增益γ
cc
可以由标称参数值和方程4给出。结果可以是pert_out_cc。可以使用减法器/加法器536从来自低通滤波器506的输入减去pert_out_cc,并且将结果用作pert_out。
72.图7是根据本公开的实施方案的用于估计定子电阻的方法600的图示。方法600可以由如上所讨论的图2至图6的元件中的任何元件执行。例如,方法600可以由srcc 102执行。方法600可以由模拟电路、数字电路、存储在机器可读介质中的指令执行,这些指令在由处理器加载和执行时执行该方法的步骤或它们的任何组合。方法600可以在任何合适的步骤初始化和终止。方法600的各种步骤可以重复、省略、相对于彼此并行或递归地执行或按不同的序列执行。
73.在步骤605处,可以初始化马达和控制器。控制器可以确定各种操作参数,诸如马达的定子电阻或马达的经估计的定子电阻。
74.在步骤610处,控制器可以使用任何合适的反馈控制机制来控制马达以在指定的
设定值处操作。控制器可以在其反馈中使用马达速度和马达电流。
75.在步骤615处,可以确定是否要进入诊断模式。这种模式可以包括确定马达的定子电阻的变化。诊断模式可以例如在以下情况下发起:周期性地;在用户或软件要求时;在温度或其他操作条件改变时;在确定误差时;或在使用马达达特定时间之后。如果将进入诊断模式,则方法600可前进至步骤620。如果将不进入诊断模式,则方法600可以返回至步骤610。
76.在步骤620处,可以将扰动或激发信号施加到马达控制输入或输入到马达的控制器的输入。扰动信号可以是具有低频率的正弦信号。在625处,可以在马达的输出中观察施加扰动信号的结果。在一个实施方案中,可以观察d轴输出。在步骤630处,基于马达的输入和输出,可以确定由于扰动输入引起的增益。在一个实施方案中,在625处观察到的d轴输出可以乘以620处的扰动信号作为扰动输出。可以针对任何交叉耦合效应调整扰动输出。扰动输入可以给出为输入到马达的输入乘以扰动信号。可以通过将扰动输出除以扰动输入来获得增益。在步骤635处,基于所确定的增益,可以估计马达的定子电阻。可以根据方程8和所确定的增益来估计定子电阻。在步骤640处,可以更新定子电阻并且采取校正动作,诸如通知最终用户,或者利用更新的定子电阻执行马达控制。方法600可以在步骤610处重复。
77.尽管上文已描述了示例实施方案,但在不脱离这些实施方案的实质和范围的情况下,可由本公开进行其他变型和实施方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。