用于医疗程序的计算机辅助识别的系统和方法
1.背景
技术领域
2.本公开涉及计算机辅助识别,并且更具体地涉及用于医疗程序的计算机辅助识别。
背景技术:
3.过去,未能正确识别患者可能会导致输血错误、用药错误、不正确人员程序、测试错误和/或不正确医疗程序部位错误等。患者错误识别可能是医疗程序错误的根本原因。可能发生患者错误识别的领域可能出现在包括手术干预、输血、给药和/或静脉切开术等中。患者的错误识别可能由姓名结构(例如,姓名非常相似)、出生日期不准确、隐藏身份的衣服、无意识的患者、经由计算机化系统登记患者时出现错误、识别腕带不存在、识别腕带识别了其他(例如不正确的)患者等引起。此外,未能正确识别患者的眼睛还可能会导致输血错误、用药错误、不正确人员程序、测试错误和/或不正确医疗程序部位错误等。
技术实现要素:
4.本公开提供了一种系统,所述系统能够接收第一患者的标识。在一个示例中,所述系统可以从医务人员处接收第一患者的标识。在另一示例中,所述系统可以经由扫描患者的腕带来接收所述第一患者的标识。所述系统可以进一步至少基于所述第一患者的标识来检索第一眼睛标识信息,所述第一眼睛标识信息包括与所述第一患者的第一眼睛相关联的第一多个虹膜结构。所述系统可以进一步确定当前患者的眼睛的第二多个虹膜结构。所述系统可以进一步确定所述第二多个虹膜结构是否与所述第一多个虹膜结构匹配。如果所述第二多个虹膜结构与所述第一多个虹膜结构匹配,则所述系统可以进一步提供已正确识别所述第一眼睛的指示。如果所述第二多个虹膜结构与所述第一多个虹膜结构不匹配,则所述系统可以进一步提供未正确识别所述第一眼睛的指示。
5.所述第一眼睛标识信息可以进一步包括与所述第一眼睛相关联的至少一个距离测量值。例如,与所述第一眼睛相关联的所述至少一个距离测量值可以包括从所述第一眼睛的角膜到所述第一眼睛的晶状体的距离测量值、从所述第一眼睛的晶状体到所述第一眼睛的视网膜的距离测量值、所述第一眼睛的角膜厚度和所述第一眼睛的晶状体厚度中的至少一个。所述系统可以进一步确定所述当前患者的眼睛的至少一个距离测量值。例如,与所述当前患者的眼睛相关联的所述至少一个距离测量值可以包括从所述当前患者的眼睛的角膜到所述当前患者的眼睛的晶状体的距离测量值、从所述当前患者的眼睛的晶状体到所述当前患者的眼睛的视网膜的距离测量值、所述当前患者的眼睛的角膜厚度和所述当前患者的眼睛的晶状体厚度中的至少一个。所述系统可以进一步确定所述当前患者的眼睛的所述至少一个距离测量值是否同与所述第一眼睛相关联的所述至少一个距离测量值匹配。如果所述第二多个虹膜结构与所述第一多个虹膜结构匹配,并且所述当前患者的眼睛的所述
至少一个距离测量值同与所述第一眼睛相关联的所述至少一个距离测量值匹配,则所述系统可以执行提供已正确识别所述第一眼睛的所述指示。如果所述当前患者的眼睛的所述至少一个距离测量值同与所述第一眼睛相关联的所述至少一个距离测量值不匹配,则所述系统可以执行提供所述未正确识别所述第一眼睛的所述指示。
6.所述系统可以进一步至少基于所述第一患者的标识和所述当前患者的眼睛的第二多个虹膜结构中的一者来检索医疗程序信息。所述系统可以进一步经由显示器和显微镜集成显示器中的至少一个来提供所述医疗程序信息。
7.所述第一多个虹膜结构中的第一虹膜结构可以与所述第一多个虹膜结构中的第二虹膜结构相对于所述第一眼睛的瞳孔中心以第一角度分隔开。所述第二多个虹膜结构中的第一虹膜结构可以与所述第二多个虹膜结构中的第二虹膜结构相对于所述当前患者的眼睛的瞳孔中心以第二角度分隔开。例如,为了确定所述第二多个虹膜结构是否与所述第一多个虹膜结构匹配,所述系统可以进一步确定第二角度是否与所述第一角度匹配。
8.所述第一多个虹膜结构中的第一虹膜结构可以与所述第一眼睛的瞳孔中心相距第一距离。所述第二多个虹膜结构中的第一虹膜结构可以与所述当前患者的眼睛的瞳孔中心相距第二距离。例如,为了确定所述第二多个虹膜结构是否与所述第一多个虹膜结构匹配,所述系统可以进一步确定所述第二距离是否与所述第一距离匹配。
9.所述当前患者可以是所述第一患者。所述当前患者的眼睛可以是所述第一患者的不同于所述第一眼睛的第二眼睛。在一个示例中,所述第一眼睛可以是所述患者的右眼,并且所述第二眼睛可以是所述患者的左眼。在另一示例中,所述第一眼睛可以是所述患者的左眼,并且所述第二眼睛可以是所述患者的右眼。
10.本公开进一步包括一种具有指令的非暂态计算机可读存储器设备,所述指令当由系统的处理器执行时使得所述系统执行上述步骤。本公开进一步包括如上所述的系统或非暂态计算机可读存储器设备,其具有以下一个或多个特征,这些特征除非明显地相互排斥,否则可以彼此组合使用:i)接收第一患者的标识;ii)至少基于所述第一患者的标识来检索第一眼睛标识信息,所述第一眼睛标识信息包括与所述第一患者的第一眼睛相关联的第一多个虹膜结构;iii)确定与当前患者的眼睛相关联的第二多个虹膜结构;iv)可以确定所述第二多个虹膜结构是否与所述第一多个虹膜结构匹配;v)如果所述第二多个虹膜结构与所述第一多个虹膜结构匹配,则提供已正确识别所述第一眼睛的指示;vi)如果所述第二多个虹膜结构与所述第一多个虹膜结构不匹配,则提供未正确识别所述第一眼睛的指示;vii)确定所述当前患者的眼睛的至少一个距离测量值;vi)确定所述当前患者的眼睛的所述至少一个距离测量值是否同与所述第一眼睛相关联的所述至少一个距离测量值匹配;viii)如果所述第二多个虹膜结构与所述第一多个虹膜结构匹配,并且所述当前患者的眼睛的所述至少一个距离测量值同与所述第一眼睛相关联的所述至少一个距离测量值匹配,则执行提供已正确识别所述第一眼睛的所述指示;ix)如果所述当前患者的眼睛的所述至少一个距离测量值同与所述第一眼睛相关联的所述至少一个距离测量值不匹配,则执行提供所述未正确识别所述第一眼睛的所述指示;x)至少基于所述第一患者的标识和所述当前患者的眼睛的第二多个虹膜结构中的一者来检索医疗程序信息;以及xi)经由显示器和显微镜集成显示器中的至少一个来提供所述医疗程序信息;
11.上述任何系统都能够执行上述任何方法,并且上述任何非暂态计算机可读存储器
设备都能够使系统执行上述任何方法。可以在上述任何系统上或使用上述任何非暂态计算机可读存储器设备来实施上述任何方法。
12.应该理解的是,前述总体描述和以下详细描述本质上都是示例和解释性的,并且旨在提供对本公开的理解,而不限制本公开的范围。就此而言,通过以下详细描述,本公开的附加方面、特征以及优点对于本领域技术人员而言将是明显的。
附图说明
13.为了更加完整地理解本公开及其特征和优点,现在参考结合附图进行的以下描述,这些附图并未按比例绘制,在这些附图中:
14.图1a展示了医疗系统的示例;
15.图1b展示了生物测量设备的示例;
16.图2a至图2c展示了与眼睛相关联的测量值的示例;
17.图3a展示了医疗系统的第二示例;
18.图3b展示了医疗系统的另一个示例;
19.图3c展示了显微镜集成显示器的示例以及手术工具器械的示例;
20.图4a展示了提供警告或错误的图形用户界面的示例;
21.图4b展示了提供已正确识别患者的指示的图形用户界面的示例;
22.图4c展示了提供警告或错误的图形用户界面的另一个示例;
23.图4d展示了提供已正确识别患者的眼睛的指示的图形用户界面的示例;
24.图5a展示了靠近不正确的眼睛的手术工具器械的示例;
25.图5b展示了靠近正确的眼睛的手术工具器械的示例;
26.图5c展示了提供警告或错误的图形用户界面的另一个示例;
27.图5d展示了提供没有识别出错误的指示的图形用户界面的示例;
28.图6展示了计算机系统的示例;
29.图7a和图7b展示了操作医疗系统的方法的示例;
30.图8a和图8b展示了患者的眼睛的虹膜结构的测量值的示例;
31.图8c和图8d展示了当前患者的眼睛的虹膜结构的测量值示例;
32.图8e和图8f展示了当前患者的另一只眼睛的虹膜结构的测量值的示例;
33.图8g至图8i展示了当前患者的眼睛的测量值的示例;以及
34.图8j至图8l图示了当前患者的另一只眼睛的测量值的示例。
具体实施方式
35.在以下描述中,通过举例的方式阐述了细节以便于讨论所公开的主题。然而,对于本领域普通技术人员而言明显的是,所公开的实施例是示例性的并且不是对所有可能的实施例的穷举。
36.如本文所使用的,附图标记指代实体的类别或类型,并且在这样的附图标记之后的任何字母指代这个类别或类型的特定实体的具体实例。因而,例如,用
‘
12a’指代的假设实体可以指代特定类别/类型的特定实例,并且总体上,标记
‘
12’可以指代属于这个特定类别/类型的实例的集合、或这个特定类别/类型的任何一个实例。
37.医疗系统可以用于识别患者。在一个示例中,第一医疗系统可以在第一时间用于在医疗程序之前识别患者。在另一示例中,第二医疗系统可以在第二时间用于在医疗程序之前识别患者。第二时间可以晚于第一时间。在一个示例中,第一医疗系统可以在医生办公室使用。在另一示例中,第二医疗系统可以在手术设施处使用。
38.第一医疗系统可以将与患者相关联的两个或更多个标识属性相关联。例如,与患者相关联的两个或更多个标识属性可以包括以下中的两个或更多个:患者姓名、患者地址、患者电话号码、患者的政府颁发的识别号或字符串、患者出生日期、患者的第一医疗设施标识、以及患者的第一眼睛标识等。可以经由眼睛识别过程、方法和/或系统利用患者的第一眼睛标识来识别患者和/或患者的眼睛。
39.第二医疗系统可以将与患者相关联的两个或更多个标识属性相关联。例如,与患者相关联的两个或更多个标识属性可以包括以下中的两个或更多个:患者姓名、患者地址、患者电话号码、患者的政府颁发的识别号或字符串、患者出生日期、患者的第一医疗设施标识、患者的第二第一医疗设施标识、患者的第一眼睛标识、以及患者的第二眼睛标识等。第二医疗系统可以利用眼睛识别过程、方法和/或系统来获得患者的第二眼睛标识并且确定患者的第一眼睛标识和患者的第二眼睛标识是否匹配。如果患者的第一眼睛标识和患者的第二眼睛标识匹配,则可以进行与患者相关联的医疗程序。例如,与患者相关联的医疗程序可以包括与患者相关联的手术程序。
40.如果患者的第一眼睛标识和患者的第二眼睛标识匹配,则可以至少基于与患者相关联的标识来检索医疗程序。与患者相关联的标识可以包括患者的第一眼睛标识和/或患者的第二眼睛标识。例如,医疗系统可以从数据库中检索医疗程序信息。医疗系统可以至少基于与患者相关联的标识从数据库中检索医疗程序信息。在一个示例中,数据库可以用患者的标识作为多个医疗程序信息的键。在另一示例中,数据库可以用相应眼睛的虹膜结构作为多个医疗程序信息的键。相应患者的眼睛标识可以包括与相应一只或多只眼睛的虹膜结构相关联的信息。相应患者的眼睛标识可以包括与相应一只或多只眼睛的一个或多个测量值相关联的信息。医疗程序可以被自动检索。例如,自动检索医疗程序可以包括自动加载医疗程序。医疗程序可以包括预先计划的治疗方案。例如,可以为匹配的患者和/或匹配的患者眼睛自动加载预先计划的治疗方案。自动加载医疗程序可以准许医生(例如,外科医生)开始和/或启动医疗程序。医疗程序可以经由显微镜集成显示器和/或医疗系统的显示器来显示。在一个示例中,与不自动加载医疗程序相比,这可以减少医疗程序的时间量。在另一示例中,这可以减少在执行一个或多个医疗程序时的一个或多个可能的错误。如果至少基于与患者相关联的标识为医生自动加载医疗程序,则不会对不正确的患者执行医疗程序。
41.如果患者的第一眼睛标识和患者的第二眼睛标识不匹配,则不会进行与患者相关联的医疗程序。在一个示例中,会发出错误或警告,这可以向医务人员报警未正确识别患者。在另一示例中,会发出错误或警告,这可以向医务人员报警未正确识别患者的眼睛。
42.一个或多个眼睛识别系统、一个或多个眼睛识别方法、和/或一个或多个眼睛识别过程可以用于患者的眼睛识别。例如,眼睛识别可以至少基于通过分析图案来识别患者,这些图案至少基于患者眼睛的一个或多个结构和/或患者眼睛的一个或多个部分的一个或多个形状。在一个示例中,眼睛识别可以经由从患者眼睛的图像中提取界标(landmark)和/或
特征来识别眼睛特征。在第二示例中,眼睛识别可以经由识别患者眼睛的虹膜的一个或多个结构来识别眼睛特征。在第三示例中,眼睛识别可以经由识别患者眼睛的视网膜的一个或多个图案来识别眼睛特征。在另一示例中,眼睛识别可以经由确定患者眼睛的一个或多个深度测量值来识别眼睛特征。患者眼睛的深度测量值可以包括从患者眼睛的角膜到患者眼睛的晶状体的距离测量值。患者眼睛的深度测量值可以包括从患者眼睛的晶状体到患者眼睛的视网膜的距离测量值。一个或多个眼睛识别系统、一个或多个眼睛识别方法、和/或一个或多个眼睛识别过程可以确定与患者眼睛相关联的数据。与患者眼睛相关联的数据可以包括模板。例如,模板可以与照片区分开来,因为模板可以包括可以用于区分第一患者的眼睛与不同于第一患者的第二患者的眼睛的数据。
43.一个或多个眼睛识别系统、一个或多个眼睛识别方法、和/或一个或多个眼睛识别过程可以利用三维技术,这些三维技术利用一个或多个投光器和/或一个或多个传感器等来确定关于患者眼睛的形状的信息。例如,可以利用关于患者眼睛的形状的信息来确定患者眼睛的表面的一个或多个特征。患者眼睛的表面的一个或多个特征可以包括眼睛轮廓等。利用三维眼睛识别技术的优点可以是三维眼睛识别技术可以不受光照变化的影响。一个或多个眼睛识别系统、一个或多个眼睛识别方法、和/或一个或多个眼睛识别过程可以利用多个图像传感器。例如,该多个图像传感器可以包括多个相机。三维眼睛识别技术可以利用多个图像传感器。
44.眼睛识别系统可以包括一个或多个图像采集设备。例如,该一个或多个图像采集设备可以包括一个或多个相机。眼睛识别系统可以包括一个或多个投光器。在一个示例中,投光器可以投射红外光。在另一示例中,投光器可以包括激光器。眼睛识别系统可以确定患者眼睛上的位置。例如,患者眼睛上的位置可以用于确定患者眼睛的模板。患者眼睛的模板可以与患者眼睛的形貌相关联。患者眼睛的模板可以用于眼睛识别。在一个示例中,可以在确认或否认患者的身份时将患者眼睛的模板与另一个模板进行比较。在另一示例中,可以在确认或否认患者眼睛的身份时将患者眼睛的模板与另一模板进行比较。
45.与患者相关联的医疗程序可以包括患者的一部分(例如,医疗程序的部位)。例如,患者的一部分可以与患者的另一部分类似。例如,患者的右眼可以与患者的左眼类似。例如,患者的右眼可以看上去与患者的左眼类似。与患者相关联的医疗程序可以针对患者的一部分而不针对患者的另一部分。例如,与患者相关联的医疗程序可以针对患者的右眼而不针对患者的左眼。第二医疗系统可以利用计算机视觉过程、方法和/或系统来区别于患者的其他部分而确定患者的一部分。计算机视觉过程、方法、和/或系统可以利用眼睛识别过程、方法和/或系统来区别于患者的其他部分而确定患者的一部分。例如,第二医疗系统可以确定手术工具器械在与患者的一部分无关联的区域内。如果第二医疗系统确定手术工具器械在与患者的一部分无关联的区域内,则第二医疗系统可以发出警告或错误。在一个示例中,如果医疗程序针对患者的右眼(例如,医疗程序的部位),并且如果第二医疗系统确定手术工具器械在与患者的右眼无关联的区域中,则第二医疗系统可以发出警告或错误。在另一个方面,如果医疗程序针对患者的右眼(例如,医疗程序的部位),并且如果第二医疗系统确定手术工具器械在与患者左眼相关联的区域内,则第二医疗系统可以发出警告或错误。
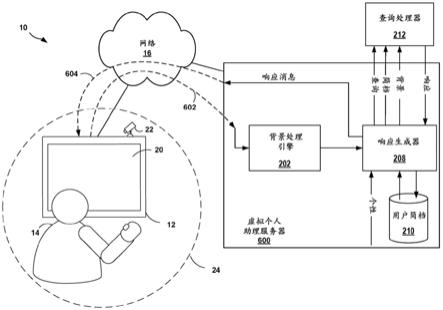
46.现在转向图1a,该图展示了医疗系统的示例。如所示出的,医疗系统110可以用于
患者120。如所展示的,医疗系统110可以包括计算机系统112。计算机系统112可以通信地耦合到显示器116a和116b。作为示例,计算机系统112可以与显示器116集成。计算机系统112可以通信地耦合到生物测量设备114。在一个示例中,生物测量设备114可以包括一个或多个相机。在另一示例中,生物测量设备114可以包括三维扫描仪。生物测量设备114可以用于对患者120的眼睛122的生物测量。如所示出的,显示器116a可以显示与患者120的眼睛122相关联的图像130a。如所展示的,显示器116b可以显示与患者120的眼睛122相关联的图像130b。
47.计算机系统112可以确定眼睛识别信息。例如,眼睛识别信息可以包括与患者120的眼睛122相关联的生物测量信息。与眼睛122相关联的生物测量信息可以包括眼睛122的巩膜的血管图案、眼睛122的虹膜结构、眼睛122的虹膜结构的位置、眼睛122的角膜到眼睛122的晶状体的距离测量值、眼睛122的晶状体到眼睛122的视网膜的距离测量值、眼睛122的角膜断层扫描、眼睛122的视网膜图案、眼睛122的角膜厚度、眼睛122的晶状体厚度和波前测量值等中的一个或多个。
48.如所示出的,显示器116b可以显示眼睛122的巩膜的血管132的图案。如所展示的,显示器116b可以显示眼睛122的虹膜134a-134c的结构。如所示出的,显示器116b可以显示显示区域136a-136d。在一个示例中,显示区域136可以显示眼睛122的角膜到眼睛122的晶状体的距离测量值、眼睛122的晶状体到眼睛122的视网膜的距离测量值、虹膜结构的位置134、角膜断层扫描、或波前测量信息等与眼睛122相关联的其他生物测量信息。在另一示例中,显示区域136可以显示与患者120相关联的任何信息。
49.人150可以操作医疗系统110。例如,人150可以是医务人员。人150可以将与患者120相关联的标识信息输入到计算机系统112中。与患者120相关联的标识信息可以包括以下中的一个或多个:患者120的姓名、患者120的地址、患者120的电话号码、患者120的政府颁发的识别号、患者120的政府颁发的识别字符串、以及患者120的出生日期等。在一个示例中,计算机系统112可以将与患者120相关联的标识信息与眼睛识别信息相关联。在另一示例中,计算机系统112可以将与患者120相关联的标识信息与模板相关联。
50.在计算机系统112将与患者120相关联的标识信息与眼睛识别信息相关联之前,人150可以验证与患者120相关联的标识信息的一个或多个部分。例如,在将医疗系统110用于患者120之前,与患者120相关联的标识信息的一个或多个部分可能已经经由计算机系统112可访问的存储设备进行存储。人150可以配置与患者120的一部分相关联的数据。例如,人150可以配置与患者120的右眼相关联的数据。
51.人150可以将与患者120相关联的医疗程序信息提供给计算机系统112。医疗程序信息可以与医疗程序相关联。医疗程序信息可以是与患者120相关联的标识信息。计算机系统112可以存储医疗程序信息。例如,计算机系统112可以存储医疗程序信息以供以后使用。医疗程序信息可以与手术相关联。例如,可以在手术之前检索医疗程序信息。可以在医疗程序期间使用医疗程序信息。例如,医疗程序可以包括手术。
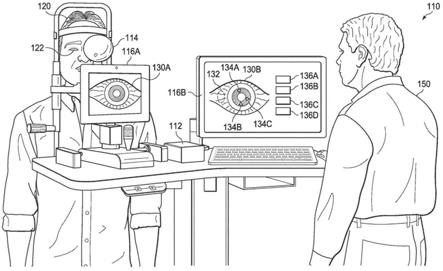
52.现在转到图1b,展示了生物测量设备的示例。如所示出的,生物测量设备114可以包括图像传感器160a-160c。例如,图像传感器160可以包括相机。如所展示的,生物测量设备114可以包括投光器162a-162c。在一个示例中,投光器162可以投射可见光。在另一示例中,投光器162可以投射红外光。投光器162可以将圆和/或点投射到患者的眼睛上。图像传
感器160可以接收投射到患者的眼睛上的圆和/或点的反射。计算机系统可以至少基于投射到患者的眼睛上的圆和/或点的反射来确定与患者的眼睛相关联的一个或多个位置和/或一个或多个模板。如所示出的,生物测量设备114可以包括深度传感器164a-164c。深度传感器164可以包括投光器162。深度传感器164可以包括光学传感器。如所展示的,生物测量设备114可以包括光学低相干反射计(olcr)设备166。如所示出的,生物测量设备114可以包括波前设备168。
53.波前设备168可以包括光源和波前传感器等中的一个或多个。光源可以向眼睛122提供第一光波。波前传感器可以从眼睛122接收至少基于第一光波的第一扰动光波。在一个示例中,波前设备168可以至少基于第一扰动光来确定第一光学矫正。在另一示例中,计算机系统可以至少基于第一扰动光来确定第一光学矫正。波前设备168可以至少基于第一扰动光波向计算机系统提供数据。例如,计算机系统可以至少基于来自波前设备168的数据来确定第一光学矫正。
54.可以组合图像传感器160、投光器162、深度传感器164、olcr设备166和波前设备168中的任何两个或更多个。图像传感器160a-160c中的一个或多个、投光器162a-162c中的一个或多个、深度传感器164a-164c中的一个或多个、olcr设备166和/或波前设备168等可以产生可以被计算机系统利用的数据。
55.现在转到图2a至图2c,展示了与眼睛相关联的测量值的示例。如图2a所示,测量值210a、212a和214a可以与眼睛122相关联。在一个示例中,测量值210a可以与从眼睛122的角膜220到眼睛122的晶状体222的距离测量值相关联。在第二示例中,测量值212a可以与眼睛122的晶状体222的距离测量值相关联。在另一示例中,测量值214a可以与从眼睛122的晶状体222到眼睛122的视网膜224的距离测量值相关联。测量值210a、212a和214a可以是轴上测量值。
56.如图2b所示,测量值210b、212b和214b可以与眼睛122相关联。在一个示例中,测量值210b可以与从眼睛122的角膜220到眼睛122的晶状体222的距离测量值相关联。在第二示例中,测量值212b可以与眼睛122的晶状体222的距离测量值相关联。在另一示例中,测量值214b可以与从眼睛122的晶状体222到眼睛122的视网膜224的距离测量值相关联。测量值210b、212b和214b可以是离轴测量值。例如,测量值210b、212b和214b可以偏离轴230。测量值210b、212b和214b可以在竖直方向上偏离轴230。测量值210b、212b和214b可以在水平方向上偏离轴230。
57.如图2c所示,测量值210c、212c和214c可以与眼睛122相关联。在一个示例中,测量值210c可以与从眼睛122的角膜220到眼睛122的晶状体222的距离测量值相关联。在第二示例中,测量值212c可以与眼睛122的晶状体222的距离测量值相关联。在另一示例中,测量值214c可以与从眼睛122的晶状体222到眼睛122的视网膜224的距离测量值相关联。测量值210c、212c和214c可以是离轴测量值。例如,测量值210c、212c和214c可以偏离轴230。测量值210c、212c和214c可以在竖直方向上偏离轴230。测量值210c、212c和214c可以在水平方向上偏离轴230。
58.生物测量设备114可以执行与眼睛122相关联的测量。例如,生物测量设备114可以确定测量值210、212和214等中的一个或多个。测量值210、212和/或214等可以用于确定眼睛122的形状。生物测量设备114可以在不接触眼睛122的情况下执行与眼睛122相关联的测
量。例如,生物测量设备114可以在不接触眼睛122的情况下确定测量值210、212和214等中的一个或多个。olcr设备166可以在不接触眼睛122的情况下确定测量值210、212和214等中的一个或多个。例如,olcr设备166可以确定测量值210、212和214等中的一个或多个——使用单光束干涉仪或多光束干涉仪以及光束偏转机构来确定沿着轴230(例如,视轴)和/或与轴230水平和/或竖直地相距一定度数的测量值210、212和214等中的一个或多个。
59.olcr设备166可以包括单光束干涉仪或多光束干涉仪和/或光束偏转机构。olcr设备166可以包括光源。例如,光源可以包括二极管。二极管可以发射红外光。在一个示例中,红外光可以与大约845纳米(nm)的波长相关联。在另一示例中,红外光可以与大约30微米(μm)的相干长度相关联。可以使用其他光波长和/或其他相干长度。olcr设备166可以执行对眼睛122的多次扫描。例如,olcr设备166可以执行对眼睛122的多次扫描以确定测量值210、212和214等中的每一个。
60.现在转到图3a,展示了医疗系统的第二示例。如所示出的,外科医生310可以利用手术工具器械320。在一个示例中,外科医生310可以在涉及患者120的眼睛122的外科手术中利用手术工具器械320。例如,医疗系统300a可以包括眼科手术工具跟踪系统。如所展示的,医疗系统300a可以包括计算机系统330、显示器340、以及显微镜集成显示器(mid)350。
61.计算机系统330可以接收由一个或多个图像传感器捕获的图像帧。例如,计算机系统330可以对该一个或多个图像帧执行各种图像处理。计算机系统330可以对该一个或多个图像帧执行图像分析,以从该一个或多个图像帧中识别和/或提取手术工具器械320的一个或多个图像。计算机系统330可以生成可以叠加该一个或多个图像帧的图形用户界面(gui)。例如,gui可以包括一个或多个指示符和/或一个或多个图标等。该一个或多个指示符可以包括外科手术数据、比如一个或多个位置和/或一个或多个取向。该一个或多个指示符可以包括一个或多个警告。gui可以通过显示器340和/或mid 350被显示给外科医生310和/或其他医务人员。
62.计算机系统330、显示器340、以及mid 350可以在彼此通信地耦合的单独壳体中或在公共控制台或壳体内实施。用户接口可以与计算机系统330、显示器340、以及mid 350等中的一个或多个相关联。例如,除了其他输入设备之外,用户接口还可以包括以下中的一个或多个:键盘、鼠标、操纵杆、触摸屏、眼睛跟踪设备、语音识别设备、手势控制模块、拨号盘和/或按钮。用户(例如,外科医生310和/或其他医务人员)可以经由用户接口来输入期望的指令和/或参数。例如,可以利用用户接口来控制计算机系统330、显示器340、以及mid 350等中的一个或多个。
63.现在转到图3b,展示了医疗系统的另一个示例。如所示出的,外科医生310可以利用系统300b。例如,外科医生310可以在涉及患者120的眼睛122的手术中利用系统300b。系统300b可以包括多个系统。如所示出的,系统300b可以包括切割系统315a。例如,外科医生310可以在切割眼睛122时利用系统315a。眼睛122可以包括患者120的眼睛的角膜瓣。如所展示的,系统300b可以包括整形系统315b。例如,外科医生310可以利用整形系统315b对患者340的角膜的内部部分进行消融。
64.如所示出的,系统315a可以包括显示器340a。如所展示的,系统315a可以包括显微镜显示器350a。例如,显微镜显示器350a可以包括mid。系统315a可以包括图像传感器160a-160c中的一个或多个、投光器162a-162c中的一个或多个、深度传感器164a-164c中的一个
或多个、olcr设备166和/或波前设备168等。如所展示的,系统315b可以包括显示器340b。如所示出的,系统315b可以包括显微镜显示器350b。例如,显微镜显示器350b可以包括mid。系统315b可以包括图像传感器160a-160c中的一个或多个、投光器162a-162c中的一个或多个、深度传感器164a-164c中的一个或多个、olcr设备166和/或波前设备168等。
65.系统315a可以包括激光器(比如飞秒激光器),该激光器可以使用短激光脉冲来消融一系列较小的角膜组织部分以形成可以被提起以暴露角膜的内部部分的瓣。可以使用切割设备显示器340a和350a中的一者或两者连同控制设备和计算机系统330a来计划和切割瓣。如所示出的,系统315a可以包括计算机系统330a。例如,计算机系统330a可以耦合到系统315a的图像传感器160a-160c中的一个或多个、投光器162a-162c中的一个或多个、深度传感器164a-164c中的一个或多个、olcr设备166和/或波前设备168等。如所展示的,系统315b可以包括计算机系统330b。例如,计算机系统330b可以耦合到系统315b的图像传感器160a-160c中的一个或多个、投光器162a-162c中的一个或多个、深度传感器164a-164c中的一个或多个、olcr设备166和/或波前设备168等。
66.系统315a和315b可以如图3b所示物理地分离。患者120可以在系统315a与315b之间移动。可替代地,患者120可以保持静止,而系统315a和315b可以移动至患者120。系统315a和315b可以物理地组合成单个整体设备,使得在系统315a与315b之间切换时,设备和患者120均无需重新定位。
67.系统300b可以包括用于控制系统315a和315b的一个或多个控制设备。例如,该一个或多个控制设备可以包括以下各项中的一项或多项:交互式显示器(比如触摸屏显示器)、键盘、鼠标、触摸板、按键、操纵杆、脚踏板、平视显示器、虚拟现实眼镜、或能够与用户(比如医务人员)交互的其他设备。
68.系统300b可以包括至少一个计算机系统,该至少一个计算机系统被配置为生成在显示器340a、350a、340b和350b等中的至少一个上呈现的图像。例如,该至少一个计算机系统可以包括计算机系统330a和330b中的一个或多个。计算机系统330a和330b中的一个或多个可以耦合至观察设备,比如显微镜、相机、光学相干断层扫描(oct)设备或显示器、或者能够测量进行手术的眼睛的位置的另一个设备。计算机系统330a和330b中的一个或多个可以耦合至控制设备中的一个或多个。
69.在一个示例中,切割设备计算机系统330a:i)可以耦合至当患者120与系统315a定位在一起时观察眼睛的观察设备,ii)可以向显示器340a和350a中的一个或多个提供关于所计划的瓣位置和所计划的消融区域的图形信息,以及iii)可以耦合至系统315a的一个或多个控制设备。在第二示例中,整形设备计算机330b:i)可以耦合至当患者120与整形设备定位在一起时观察眼睛的观察设备,ii)可以向显示器340b和350b中的一个或多个提供关于所计划的瓣位置和所计划的消融区域的图形信息,并且iii)可以耦合至系统315b的一个或多个控制设备。在另一示例中,计算机系统可以包括上面关于计算机系统330a和330b描述的特性和/或属性。
70.系统300的计算机系统可以以有线方式或无线方式耦合至系统300的另一个部分。系统300中的计算机系统中的一个或多个可以耦合至存储在本地、存储在远程计算机系统或远程数据中心上、或者存储在这两者上的数据库,该数据库存储患者数据、治疗计划、和/或与医学治疗和/或系统300相关联的其他信息。在一个示例中,数据库可以包括关系数据
库。在第二示例中,数据库可以包括图形数据库。在另一示例中,数据库可以包括“非关系型”(not only sql,nosql)数据库。
71.系统300可以输入关于患者、和要对这个患者进行或实际对这个患者进行的治疗的信息。系统300可以允许用户输入和查看关于患者以及要对这个患者进行的治疗的信息。这种数据可以包括关于患者的信息(比如标识信息、患者的病史)和关于正在治疗的眼睛122的信息。这种数据可以包括关于治疗计划的信息,比如角膜切割的形状和位置、消融的形状和位置等。
72.现在转向图3c,展示了显微镜集成显示器的示例以及手术工具器械的示例。如所示出的,手术工具器械320a可以是或包括手术刀。如所展示的,手术工具器械320b可以是或包括棉签。如所示出的,手术工具器械320c可以是或包括镊子。未具体展示的其他手术工具器械可以与本文描述的一个或多个系统、一个或多个过程和/或一个或多个方法一起使用。
73.作为示例,手术工具器械320可以用一个或多个图案来标记。该一个或多个图案可以用于标识手术工具器械320。该一个或多个图案可以包括散列图案、条纹图案、以及分形图案等中的一个或多个。作为另一示例,手术工具器械320可以用染料和/或涂料来标记。该染料和/或涂料可以反射可见光、红外光、以及紫外光等中的一个或多个。在一个示例中,照明器378可以提供紫外光,并且图像传感器372可以接收从手术工具器械320反射的紫外光。计算机系统330可以从图像传感器372接收至少基于从手术工具器械320反射的紫外光的图像数据,并且可以利用至少基于从手术工具器械320反射的紫外光的该图像数据、根据图像传感器372所提供的其他图像数据来识别手术工具器械320。在另一示例中,照明器378可以提供红外光,并且图像传感器372可以接收从手术工具器械320反射的红外光。计算机系统330可以从图像传感器372接收至少基于从手术工具器械320反射的红外光的图像数据,并且可以利用至少基于从手术工具器械320反射的红外光的该图像数据、根据图像传感器372所提供的其他图像数据来识别手术工具器械320。
74.如所展示的,mid 350可以包括显示器362a和362b。例如,外科医生310可以看向多个接目镜,并且显示器362a和362b可以向外科医生310显示信息。虽然mid 350被示为具有多个显示器,但是mid 350可以包括单一显示器362。例如,mid 350可以被实施为具有一个或多个显示器362。如所示出的,mid 350可以包括图像传感器372a和372b。在一个示例中,图像传感器372a和372b可以获取图像。在第二示例中,图像传感器372a和372b可以包括相机。在另一示例中,图像传感器372可以经由可见光、红外光、以及紫外光等中的一种或多种来获取图像。一个或多个图像传感器372a和372b可以向计算机系统330提供图像数据。虽然mid 350被示为具有多个图像传感器,但是mid 350可以包括单一图像传感器372。例如,mid 350可以被实施为具有一个或多个图像传感器372。
75.如所展示的,mid 350可以包括距离传感器374a和374。例如,距离传感器374可以确定距手术工具器械320的距离。距离传感器374可以确定与z轴相关联的距离。虽然mid 350被示为具有多个图像传感器,但是mid 350可以包括单一距离传感器374。在一个示例中,mid 350可以被实施为具有一个或多个距离传感器374。在另一示例中,mid 350可以被实施为没有距离传感器。如所示出的,mid 350可以包括透镜376a和376b。虽然mid 350被示为具有多个透镜376a和376b,但是mid 350可以包括单一透镜376。例如,mid 350可以被实施为具有一个或多个透镜376。如所展示的,mid 350可以包括照明器378a和378b。例如,照
明器378可以提供和/或产生可见光、红外光、以及紫外光等中的一种或多种。虽然mid 350被示为具有多个照明器,但是mid 350可以包括单一照明器378。例如,mid 350可以被实施为具有一个或多个照明器378。mid 350可以包括如参考生物测量设备114所描述的一个或多个结构和/或一个或多个功能。在一个示例中,mid 350可以包括olcr设备166。在另一示例中,mid350可以包括波前设备168。
76.系统300可以识别患者。例如,计算机系统300可以识别患者120。系统300可以识别患者以避免对患者执行不正确的医疗程序。例如,系统300可以识别患者以避免对患者执行指定用于另一患者的医疗程序。
77.如图4a中所展示的gui 410可以提供已识别出不正确的患者的警告或错误。在一个示例中,警告或错误可以包括图标420a。在第二个示例中,警告或错误可以包括文本430a,该文本可以指示检测到不正确的患者。gui 410可以经由显示器340和/或mid 350显示。在另一示例中,警告或错误可以包括一个或多个可听声音。如图4b中所展示的gui 410可以提供已正确识别患者的指示。在一个示例中,指示可以包括图标420b。在另一示例中,指示可以包括文本430b,该文本可以指示已正确识别患者。gui 410可以经由显示器340和/或mid 350显示。
78.系统300可能识别出患者的眼睛。在一个示例中,系统300可能识别出眼睛122。在另一示例中,系统300可能识别出眼睛124。系统300可能无法识别患者的眼睛。在一个示例中,如果系统300没有识别出患者的眼睛,则系统300可以提供指示没有识别出患者的眼睛的信息。在第二示例中,如果系统300没有识别出患者的眼睛,则系统300可以拒绝访问系统300的一个或多个部分。在另一示例中,如果系统300未识别患者的眼睛,则系统300可以拒绝访问系统300的一个或多个功能。
79.如图4c中所展示的gui 410可以提供识别出不正确的眼睛的警告或错误。在一个示例中,警告或错误可以包括图标420c。在第二示例中,警告或错误可以包括文本430c,该文本可以指示检测到不正确的眼睛。gui 410可以经由显示器340和/或mid 350显示。在另一示例中,警告或错误可以包括一个或多个可听声音。如图4d中所展示的gui 410可以提供已正确识别眼睛的指示。在一个示例中,指示可以包括图标420d。在另一示例中,指示可以包括文本430d,该文本可以指示已正确识别眼睛。gui 410可以经由显示器340和/或mid350显示。
80.系统300可以重复识别患者的眼睛。在一个示例中,系统300可以在外科医生310利用系统315a至少执行医疗程序的第一部分时识别患者120的眼睛。在另一示例中,系统300可以在外科医生310利用系统315b至少执行医疗程序的第二部分时识别患者120的眼睛。医疗程序可以针对眼睛122。在一个示例中,可以利用系统315a来执行医疗程序的第一部分。在另一示例中,可以利用系统315b来执行医疗程序的第二部分。系统300可以在要利用系统315b执行医疗程序的第二部分之前确定是否识别出眼睛122。例如,系统300可以在要利用系统315b执行医疗程序的第二部分之前确定是否识别出眼睛122,使得医疗程序的第二部分不会在眼睛124上被执行。
81.系统300可以在医疗程序(例如,手术程序)期间确定手术工具器械是否用于正确的眼睛。在一个示例中,系统300可以确定手术工具器械320不可以在眼睛124上使用(如图5a所示)。系统300可能识别出眼睛124,并且可以确定手术工具器械320不可以用于眼睛
124。系统300可能未识别出眼睛,并且可以确定手术工具器械320不可以用于未被识别的眼睛。在另一示例中,系统300可以确定手术工具器械320可以用于眼睛122(如图5b所示)。系统300可能识别出眼睛122,并且可以确定手术工具器械320可以用于眼睛122。
82.如图5c所展示的gui 510可以提供不要将手术工具器械320用于不正确的眼睛的警告。在一个示例中,警告可以包括图标520a。在第二示例中,警告可以包括文本530a,该文本可以指示已在不正确的眼睛中检测到手术工具器械320。gui 510可以经由显示器340和/或mid 350显示。不要将手术工具器械320用于不正确的眼睛的警告可以包括一种或多种可听声音。
83.如图5d所示的gui 510可以提供可以将手术工具器械320用于眼睛122的指示。在一个示例中,指示可以包括图标520b。在另一示例中,指示可以包括文本530b,该文本可以指示没有检测到错误。gui 510可以经由显示器340和/或mid 350显示。
84.现在转向图6,展示了计算机系统的示例。如所示出的,计算机系统600可以包括处理器610、易失性存储器介质620、非易失性存储器介质630和输入/输出(i/o)设备640。如所展示的,易失性存储器介质620、非易失性存储器介质630、以及i/o设备640可以通信地耦合至处理器610。
85.术语“存储器介质”可以意指“存储器”、“存储设备”、“存储器设备”、“计算机可读介质”、和/或“有形计算机可读存储介质”。例如,存储介质可以包括但不限于以下存储介质:例如直接存取存储设备(包括硬盘驱动器)、顺序存取存储设备(例如磁带磁盘驱动器)、光盘(cd)、随机存取存储器(ram)、只读存储器(rom)、cd-rom、数字通用盘(dvd)、电可擦除可编程只读存储器(eeprom)、闪存、非易失性介质、和/或以上介质的一个或多个组合。如所示出的,非易失性存储器介质630可以包括处理器指令632。处理器指令632可以由处理器610执行。在一个示例中,处理器指令632的一个或多个部分可以经由非易失性存储介质630执行。在另一示例中,处理器指令632的一个或多个部分可以经由易失性存储介质620执行。处理器指令632的一个或多个部分可以被传送到易失性存储介质620。
86.处理器610可以在实现本文所述的一个或多个系统、一个或多个流程图、一个或多个过程和/或一个或多个方法的至少一部分时执行处理器指令632。例如,可以用至少按照本文所描述的一个或多个系统、一个或多个流程图、一个或多个方法和/或一个或多个过程的一部分的指令来配置、编解码和/或编码处理器指令632。尽管处理器610被图示为单个处理器,但处理器610可以是或包括多个处理器。存储介质和存储器介质中的一个或多个可以是软件产品、程序产品和/或制品。例如,可以用可由处理器执行的至少按照本文所描述的一个或多个系统、一个或多个流程图、一个或多个方法和/或一个或多个过程的一部分的指令来配置、编解码和/或编码软件产品、程序产品和/或制品。
87.处理器610可以包括可操作以解释和执行存储在存储介质中和/或经由网络接收的程序指令、处理数据或两者的任何合适的系统、设备或装置。处理器610可以进一步包括一个或多个微处理器、微控制器、数字信号处理器(dsp)、专用集成电路(asic)或被配置为解释和执行程序指令、处理数据或两者的其他电路系统。
88.i/o设备640可以包括任何一个或多个工具,该工具通过促进用户输入和向用户输出而允许、准许和/或使得用户能够与计算机系统600以及其相关联部件进行交互。促进用户输入可以允许用户操纵和/或控制计算机系统600,并且促进向用户输出可以允许计算机
系统600指示用户的操纵和/或控制的效果。例如,i/o设备640可以允许用户向计算机系统600输入数据、指令或两者并且以其他方式操纵和/或控制计算机系统600以及其相关联部件。i/o设备可以包括用户接口设备,比如键盘、鼠标、触摸屏、操纵杆、手持透镜、工具跟踪设备、坐标输入设备、或适合与系统一起使用的任何其他i/o设备。
89.i/o设备640可以包括一个或多个总线、一个或多个串行设备和/或一个或多个网络接口等,其可以促进和/或准许处理器610至少实施本文所描述的一个或多个系统、过程和/或方法的一部分。在一个示例中,i/o设备640可以包括可以促进和/或准许处理器610与外部存储器通信的存储接口。存储接口可以包括通用串行总线(usb)接口、sata(串行ata)接口、pata(并行ata)接口、以及小型计算机系统接口(scsi)等中的一个或多个。在第二示例中,i/o设备640可以包括可以促进和/或准许处理器610与网络通信的网络接口。i/o设备640可以包括无线网络接口和有线网络接口中的一个或多个。在第三示例中,i/o设备640可以包括外围组件互连(pci)接口、pci express(pcie)接口、串行外围互连(spi)接口、以及内部集成电路(i2c)接口等中的一个或多个。在第四示例中,i/o设备640可以包括可以准许处理器610与一个或多个传感器进行数据通信的电路系统。在第五示例中,i/o设备640可以促进和/或准许处理器610与显示器650和mid 660等中的一个或多个进行数据通信。在另一示例中,i/o设备640可以促进和/或准许处理器610与成像设备670进行数据通信。如所展示的,i/o设备640可以耦合至网络680。例如,i/o设备640可以包括网络接口。
90.网络680可以包括有线网络、无线网络、光网络或上述的组合等。网络680可以包括和/或耦合到各种类型的通信网络。例如,网络680可以包括和/或耦合至局域网(lan)、广域网(wan)、互联网、公共交换电话网(pstn)、蜂窝电话网、卫星电话网或上述的组合等。wan可以包括私人wan、企业wan、公共wan或上述的组合等。
91.本文所描述的计算机系统可以包括如参考计算机系统600描述的一个或多个结构和/或一个或多个功能。在一个示例中,计算机系统112可以包括如参考计算机系统600描述的一个或多个结构和/或一个或多个功能。在第二示例中,计算机系统330可以包括如参考计算机系统600描述的一个或多个结构和/或一个或多个功能。在另一示例中,mid350的计算机系统可以包括如参考计算机系统600描述的一个或多个结构和/或一个或多个功能。
92.现在转向图7a和图7b,展示了操作医疗系统的方法的示例。在710处,可以接收第一患者的标识。例如,计算机系统330可以接收第一患者的标识。第一患者可以是患者120。第一患者的标识可以包括第一患者的姓名。第一患者的标识可以包括与第一患者相关联的数字或字符串。
93.在715处,可以至少基于第一患者的标识来检索第一眼睛标识信息,该第一眼睛标识信息包括与第一患者的第一眼睛相关联的第一多个虹膜结构。例如,第一多个虹膜结构可以包括虹膜结构134a-134c中的多个。第一眼睛标识信息可以包括血管132的图案。第一眼睛标识信息可以包括测量值210a、212a、214a、210b、212b、214b、210c、212c和214c等中的一个或多个。第一眼睛标识信息可以包括如图8a和图8b所示的测量值810-814等中的一个或多个。第一眼睛标识信息可以包括如图8a和图8b所示的测量值θ1和θ2等中的一个或多个。例如,测量值θ1和θ2可以是角度测量值。角度测量值可以以度、弧度等为单位来测量。
94.在720处,可以确定当前患者的眼睛的第二多个虹膜结构。在一个示例中,当前患者的眼睛可以是如图8c和图8d所示的眼睛822。可以确定眼睛822的虹膜结构834a-834c中
的多个。在另一示例中,当前患者的眼睛可以是如图8e和图8f所示的眼睛824。可以确定眼睛824的虹膜结构836a-836c中的多个。
95.在725处,可以确定当前患者的眼睛的至少一个距离测量值。在一个示例中,当前患者的眼睛的至少一个距离测量值可以包括如图8g所示的从眼睛822的角膜860到眼睛822的晶状体862的距离测量值850a。在第二示例中,当前患者的眼睛的至少一个距离测量值可以包括如图8g所示的晶状体862的距离测量值852a。在第三示例中,当前患者的眼睛的至少一个距离测量值可以包括从眼睛822的晶状体862到眼睛822的视网膜864的距离测量值854a。测量值850a、852a和854a可以是轴上测量值。
96.在第四示例中,当前患者的眼睛的至少一个距离测量值可以包括如图8h所示的从眼睛822的角膜860到眼睛822的晶状体862的距离测量值850b。在第五示例中,当前患者的眼睛的至少一个距离测量值可以包括如图8h所示的晶状体862的距离测量值852b。在第六示例中,当前患者的眼睛的至少一个距离测量值可以包括如图8h所示的从眼睛822的晶状体862到眼睛822的视网膜864的距离测量值854b。测量值850b、852b和854b可以是离轴测量值。测量值850b、852b和854b可以偏离轴870。
97.在第七示例中,当前患者的眼睛的至少一个距离测量值可以包括如图8i所示的从眼睛822的角膜860到眼睛822的晶状体862的距离测量值850c。在第八示例中,当前患者的眼睛的至少一个距离测量值可以包括如图8i所示的晶状体862的距离测量值852c。在第九示例中,当前患者的眼睛的至少一个距离测量值可以包括如图8i所示的从眼睛822的晶状体862到眼睛822的视网膜864的距离测量值854c。测量值850c、852c和854c可以是离轴测量值。测量值850c、852c和854c可以偏离轴870。
98.在第十示例中,当前患者的眼睛的至少一个距离测量值可以包括如图8j所示的从眼睛824的角膜861到眼睛824的晶状体863的距离测量值880a。在第十一示例中,当前患者的眼睛的至少一个距离测量值可以包括如图8j所示的晶状体863的距离测量值882a。在第十二示例中,当前患者的眼睛的至少一个距离测量值可以包括如图8j所示的从眼睛824的晶状体863到眼睛824的视网膜865的距离测量值884a。测量值880a、882a和884a可以是轴上测量值。
99.在第十三示例中,当前患者的眼睛的至少一个距离测量值可以包括如图8k所示的从眼睛824的角膜861到眼睛824的晶状体863的距离测量值880b。在第十四示例中,当前患者的眼睛的至少一个距离测量值可以包括如图8k所示的晶状体863的距离测量值882b。在第十五示例中,当前患者的眼睛的至少一个距离测量值可以包括如图8k所示的从眼睛824的晶状体863到眼睛824的视网膜865的距离测量值884b。测量值880b、882b和884b可以是离轴测量值。测量值880b、882b和884b可以偏离轴871。
100.在第十六示例中,当前患者的眼睛的至少一个距离测量值可以包括如图8l所示的从眼睛824的角膜861到眼睛824的晶状体863的距离测量值880c。在第十七示例中,当前患者的眼睛的至少一个距离测量值可以包括如图8l所示的晶状体863的距离测量值882c。在第十八示例中,当前患者的眼睛的至少一个距离测量值可以包括如图8l所示的从眼睛824的晶状体863到眼睛824的视网膜865的距离测量值884c。测量值880c、882c和884c可以是离轴测量值。测量值880c、882c和884c可以偏离轴871。
101.在730处,可以确定第二多个虹膜结构中的第一虹膜结构与第二多个虹膜结构中
的第二虹膜结构之间的角度。确定第二多个虹膜结构中的第一虹膜结构与第二多个虹膜结构中的第二虹膜结构之间的角度可以包括确定第二多个虹膜结构中的第一虹膜结构与第二多个虹膜结构中的第二虹膜结构之间的相对于当前患者的眼睛的瞳孔中心的角度。
102.在一个示例中,确定第二多个虹膜结构中的第一虹膜结构与第二多个虹膜结构中的第二虹膜结构之间的相对于当前患者的眼睛的瞳孔中心的角度可以包括如图8c所示的眼睛822的虹膜结构834a与834b之间的角度θ3。在第二示例中,确定第二多个虹膜结构中的第一虹膜结构与第二多个虹膜结构中的第二虹膜结构之间的相对于当前患者的眼睛的瞳孔中心的角度可以包括如图8d所示的眼睛822的虹膜结构834a与834c之间的角度θ4。在第三示例中,确定第二多个虹膜结构中的第一虹膜结构与第二多个虹膜结构中的第二虹膜结构之间的相对于当前患者的眼睛的瞳孔中心的角度可以包括如图8e所示的眼睛824的虹膜结构836a与836b之间的角度θ5。在另一示例中,确定第二多个虹膜结构中的第一虹膜结构与第二多个虹膜结构中的第二虹膜结构之间的相对于当前患者的眼睛的瞳孔中心的角度可以包括如图8f所示的眼睛824的虹膜结构836a与836c之间的角度θ6。
103.在735处,可以确定第二多个虹膜结构中的第一虹膜结构与当前患者的眼睛的瞳孔中心之间的距离。在一个示例中,可以确定虹膜结构834a与眼睛822的瞳孔中心之间的距离810。在另一示例中,可以确定虹膜结构836a与眼睛824的瞳孔中心之间的距离840。
104.在740处,可以确定第二多个虹膜结构中的第二虹膜结构与当前患者的眼睛的瞳孔中心之间的距离。在一个示例中,可以确定虹膜结构834b与眼睛822的瞳孔中心之间的距离812。在另一示例中,可以确定虹膜结构836b与眼睛824的瞳孔中心之间的距离842。
105.在745处,可以确定第二多个虹膜结构中的第三虹膜结构与当前患者的眼睛的瞳孔中心之间的距离。在一个示例中,可以确定虹膜结构834c与眼睛822的瞳孔中心之间的距离814。在另一示例中,可以确定虹膜结构836c与眼睛824的瞳孔中心之间的距离844。
106.在750处,可以确定第二多个虹膜结构是否与第一多个虹膜结构匹配。如果第二多个虹膜结构与第一多个虹膜结构不匹配,则在755处,可以提供未正确识别第一眼睛的指示。在一个示例中,提供未正确识别第一眼睛的指示可以包括提供图标420c和文本430c等中的一个或多个。在另一示例中,提供未正确识别第一眼睛的指示可以包括提供一种或多种可听声音。提供一种或多种可听声音可以包括提供一种或多种可听警报和/或警告声音。
107.如果第二多个虹膜结构与第一多个虹膜结构匹配,则在760处,可以确定当前患者的眼睛的至少一个距离测量值是否同与第一眼睛相关联的至少一个距离测量值匹配。在一个示例中,确定当前患者的眼睛的至少一个距离测量值是否同与第一眼睛相关联的至少一个距离测量值匹配可以包括确定距离850-854中的距离是否与距离210-214中的相应距离匹配。在另一示例中,确定当前患者的眼睛的至少一个距离测量值是否同与第一眼睛相关联的至少一个距离测量值匹配可以包括确定距离880-884中的距离是否与距离210-214中的相应距离匹配。
108.如果当前患者的眼睛的至少一个距离测量值同与第一眼睛相关联的至少一个距离测量值不匹配,则该方法可以进行到755。如果当前患者的眼睛的至少一个距离测量值同与第一眼睛相关联的至少一个距离测量值匹配,则可以提供已正确识别第一眼睛的指示。例如,可以提供图标420d和文本430d等中的一个或多个。
109.在770处,可以至少基于第一患者的标识和当前患者的眼睛的第二多个虹膜结构
中的一者来检索医疗程序信息。例如,系统300可以从数据库中检索医疗程序信息。系统300可以至少基于第一患者的标识和当前患者的眼睛的第二多个虹膜结构中的一者来从数据库中检索医疗程序信息。在一个示例中,数据库可以用患者的标识作为多个医疗程序信息的键。在另一示例中,数据库可以用相应患者的相应眼睛的虹膜结构作为多个医疗程序信息的键。
110.在775处,可以经由显示器和显微镜集成显示器中的至少一个来提供医疗程序信息。例如,医疗程序信息可以包括医疗程序的步骤。医疗程序的步骤可以包括医疗程序的一系列有序步骤。
111.这些方法和/或过程要素中的一个或多个要素、和/或方法和/或过程要素的一个或多个部分可以以不同的顺序执行、可以重复、或者可以省略。此外,可以根据需要实现、例示和/或执行附加的、补充的和/或重现的方法和/或过程要素。此外,根据需要可以省略一个或多个系统要素,和/或可以添加附加的系统要素。
112.存储器介质可以是和/或可以包括制品。例如,制品可以包括和/或可以是软件产品和/或程序产品。存储器介质可以被编解码和/或编码成具有根据本文描述的一个或多个流程图、系统、方法和/或过程的处理器可执行指令,用于生产该制品。
113.以上所公开的主题应被认为是说明性而非限制性的,并且所附权利要求旨在覆盖落入本公开内容的真实精神和范围内的所有这样的修改、增强以及其他实现方式。因而,为了被法律最大程度地允许,本公开的范围将由以下权利要求及其等效物的最广泛允许的解读来确定、并且不应受限于或局限于上述详细描述。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。