技术特征:
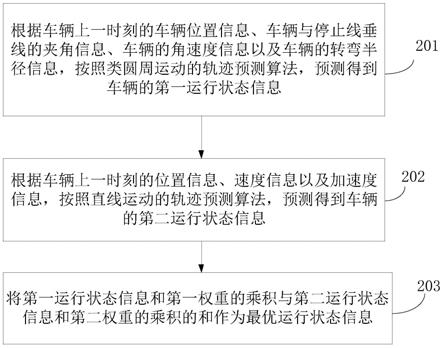
1.一种路口车辆运行状态预测方法,其特征在于,所述方法包括:根据路口中的车辆在上一时刻的车辆位置信息、车辆与停止线垂线的夹角信息、车辆的角速度信息以及车辆的转弯半径信息,按照类圆周运动的轨迹预测算法,预测得到所述车辆的第一运行状态信息;以及,根据所述车辆上一时刻的位置信息、速度信息以及加速度信息,按照直线运动的轨迹预测算法,预测得到所述车辆的第二运行状态信息;将所述第一运行状态信息和第一权重的乘积与所述第二运行状态信息和第二权重的乘积的和作为当前运行状态信息,所述第一权重和所述第二权重的和为1,所述第一权重是根据所述车辆在上一时刻与所述停止线平行的方向的速度和上一时刻与所述停止线垂直的方向的速度的比值得到的;其中,所述第一运行状态信息和所述第二运行状态信息包括如下至少一项:所述第一运行状态信息包括所述车辆的第一位置信息,所述第二运行状态信息包括所述车辆的第二位置信息;所述第一运行状态信息包括所述车辆的第一速度信息、所述第二运行状态信息包括所述车辆的第二速度信息;所述第一运行状态信息包括所述车辆的第一加速度信息,所述第二运行状态信息包括所述车辆的第二加速度信息。2.如权利要求1所述的方法,其特征在于,所述第一权重是根据所述车辆在上一时刻与所述停止线平行的方向的速度和上一时刻与所述停止线垂直的方向的速度的比值得到的,包括:通过如下公式确定所述第一权重:其中,τ为所述第一权重,所述v
i-1,x
为上一时刻所述车辆的x轴速度,所述v
i-1,y
为上一时刻所述车辆的y轴速度;以出口车道延长线和进口车道的延长线的交点为原点,以出口车道直行的反方向为x轴正方向,以出口车道向右转的方向为y轴正方向建立直角坐标系。3.如权利要求2所述的方法,其特征在于,所述车辆的第一运行状态信息包括车辆的当前时刻的第一位置信息;所述根据车辆上一时刻的车辆位置信息、车辆与停止线垂线的夹角信息、车辆的角速度信息以及车辆的转弯半径信息,按照类圆周运动的轨迹预测算法,预测得到所述车辆的第一运行状态信息,包括:通过如下公式确定车辆上一时刻至当前时刻时段内的第一位移变化:δp
x1
=r
×
[cos(α ω
×
δt)-cosα]δp
y1
=-r
×
[sin(α ω
×
δt)-sinα]通过如下公式确定当前时刻车辆的第一位置:p
x1
=p
i-1,x
δp
x1
p
y1
=p
i-1,y
δp
y1
其中,δp
x1
为上一时刻至当前时刻时段内的x方向的第一位移变化量,δp
y1
为上一时刻至当前时刻时段内的y方向的第一位移变化量,p
x1
为当前时刻x方向的第一位置,p
y1
为当前
时刻y方向的第一位置,p
i-1,x
为上一时刻x方向的位置,p
i-1,y
为上一时刻y方向的位置,r为车辆的转弯半径,α为上一时刻车辆与停止线垂线的夹角,ω为上一时刻车辆的角速度,δt为上一时刻至当前时刻的时段。4.如权利要求2所述的方法,其特征在于,所述第二运行状态信息包括车辆的当前时刻的第二位置信息;根据车辆上一时刻的位置信息、速度信息以及加速度信息,按照直线运动的轨迹预测算法,预测得到所述车辆的第二运行状态信息,包括:通过如下公式确定车辆上一时刻至当前时刻时段内的第二位移变化:通过如下公式确定车辆上一时刻至当前时刻时段内的第二位移变化:通过如下公式确定当前时刻车辆的第二位置:p
x2
=p
i-1,x
δp
x2
p
y2
=p
i-1,y
δp
y2
其中,δp
x2
为上一时刻至当前时刻时段内的x方向的第二位移变化量,δp
y2
为上一时刻至当前时刻时段内的y方向的第二位移变化量,p
x2
为当前时刻x方向的第二位置,p
y2
为当前时刻y方向的第二位置,v
i-1,x
为上一时刻车辆x方向的速度,v
i-1,y
为上一时刻车辆y方向的速度,a
i-1,x
为上一时刻车辆x方向的加速度,a
i-1,y
为上一时刻车辆y方向的加速度。5.如权利要求1所述的方法,其特征在于,所述方法还包括:确定位于第一雷达装置的视场范围内的第一车辆集合和位于第二雷达装置的视场范围内的第二车辆集合;所述第一雷达装置和第二雷达装置设置在路口的四个方向的任意两个方向上;针对于所述第一车辆集合中的任一车辆,计算所述车辆与所述第二车辆集合中每个车辆的距离,从所述第二车辆集合中选择与所述车辆的距离最小的目标车辆,当所述目标车辆和所述车辆的距离小于第一阈值时,将所述车辆作为所述目标车辆对应的一个备选可匹配车辆;针对于所述第二车辆集合中的任一目标车辆,当所述目标车辆仅对应一个备选可匹配车辆时,确定所述目标车辆和所述备选可匹配车辆属于一辆车;当所述目标车辆对应至少两个备选可匹配车辆时,确定所述至少两个备选可匹配车辆中的每个备选可匹配车辆与所述第二车辆集合中的其它车辆的最小距离,计算所述每个备选可匹配车辆与所述其它车辆的最小距离和所述每个备选可匹配车辆与所述目标车辆的距离的差值距离,将所述至少两个备选可匹配车辆中差值距离最大的备选可匹配车辆确定为和所述目标车辆属于一辆车;确定所述备选可匹配车辆对应的第二车辆集合中的车辆与备选可匹配车辆匹配成功,结束对所述备选可匹配车辆的运行状态的预测。6.一种路口车辆运行状态预测装置,其特征在于,所述装置包括:预测单元,用于根据车辆上一时刻的车辆位置信息、车辆与停止线垂线的夹角信息、车辆的角速度信息以及车辆的转弯半径信息,按照类圆周运动的轨迹预测算法,预测得到所述车辆的第一运行状态信息;以及用于根据车辆上一时刻的位置信息、速度信息以及加速
度信息,按照直线运动的轨迹预测算法,预测得到所述车辆的第二运行状态信息;计算单元,用于将第一运行状态信息和第一权重的乘积与第二运行状态信息和第二权重的乘积的和作为当前运行状态信息,所述第一权重和所述第二权重的和为1,所述第一权重是根据所述车辆在上一时刻与所述停止线平行的方向的速度和上一时刻与所述停止线垂直的方向的速度的比值得到的;其中,所述第一运行状态信息和所述第二运行状态信息包括如下至少一项:所述第一运行状态信息包括车辆的第一位置信息,所述第二运行状态信息包括车辆的第二位置信息;所述第一运行状态信息包括车辆的第一速度信息、所述第二运行状态信息包括车辆的第二速度信息;所述第一运行状态信息包括车辆的第一加速度信息,所述第二运行状态信息包括车辆的第二加速度信息。7.如权利要求6所述的装置,其特征在于,所述计算单元还用于:以出口车道延长线和进口车道的延长线的交点为原点,以出口车道直行的反方向为x轴正方向,以出口车道向右转的方向为y轴正方向建立直角坐标系;通过如下公式确定所述第一权重:其中,τ为所述第一权重,所述v
i-1,x
为上一时刻所述车辆的x轴速度,所述v
i-1,y
为上一时刻所述车辆的y轴速度。8.如权利要求7所述的装置,其特征在于,所述计算单元还用于:确定位于第一雷达装置的视场范围内的第一车辆集合和位于第二雷达装置的视场范围内的第二车辆集合;所述第一雷达装置和第二雷达装置设置在路口的四个方向的任意两个方向上;针对于所述第一车辆集合中的任一车辆,计算所述车辆与所述第二车辆集合中每个车辆的距离,从所述第二车辆集合中选择与所述车辆的距离最小的目标车辆,当所述目标车辆和所述车辆的距离小于第一阈值时,将所述车辆作为所述目标车辆对应的一个备选可匹配车辆;针对于所述第二车辆集合中的任一目标车辆,当所述目标车辆仅对应一个备选可匹配车辆时,确定所述目标车辆和所述备选可匹配车辆属于一辆车,当所述目标车辆对应至少两个备选可匹配车辆时,确定所述至少两个备选可匹配车辆中的每个备选可匹配车辆与所述第二车辆集合中的其它车辆的最小距离,计算所述每个备选可匹配车辆与所述其它车辆的最小距离和所述每个备选可匹配车辆与所述目标车辆的距离的差值距离,将所述至少两个备选可匹配车辆中差值距离最大的备选可匹配车辆确定为和所述目标车辆属于一辆车;确定所述备选可匹配车辆对应的第二集合中的车辆与备选可匹配车辆匹配成功,结束对所述备选可匹配车辆的运行状态的预测。9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,当所述计算机程序被运行时,执行如权利要求1至5中任一项所述的方法。
10.一种计算设备,其特征在于,包括:存储器,用于存储程序指令;处理器,用于调用所述存储器中存储的程序指令,按照获得的程序执行如权利要求1至5任一项所述的方法。
技术总结
本申请涉及交通技术领域,尤其涉及一种路口车辆运行状态预测方法及装置,其中,方法包括:按照类圆周运动的轨迹预测算法,预测得到车辆的第一运行状态信息;按照直线运动的轨迹预测算法,预测得到车辆的第二运行状态信息;将第一运行状态信息和第一权重的乘积与第二运行状态信息和第二权重的乘积的和作为当前运行状态信息。通过上述方式,通过预测车辆的第一运行状态信息和第二运行状态信息,并根据车辆的运行速度赋予第一运行状态信息和第二运行状态信息不同的权重来得到当前位置信息,由于第一权重是根据车辆的运行速度实时变化的,预测更加贴近实际情况,有效地提高了车辆运行状态预测的准确性。运行状态预测的准确性。运行状态预测的准确性。
技术研发人员:王雯雯 王玉波 张梅竹 段善磊
受保护的技术使用者:青岛海信网络科技股份有限公司
技术研发日:2022.01.26
技术公布日:2022/4/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。