技术特征:
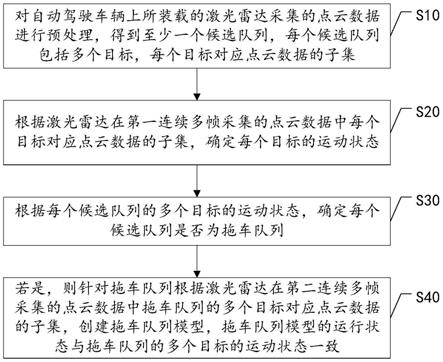
1.一种拖车队列跟踪方法,其特征在于,包括:对自动驾驶车辆上所装载的激光雷达采集的点云数据进行预处理,得到至少一个候选队列,每个候选队列包括多个目标,每个目标对应所述点云数据的子集;根据所述激光雷达在第一连续多帧采集的点云数据中所述每个目标对应所述点云数据的子集,确定所述每个目标的运动状态;根据所述每个候选队列的多个目标的运动状态,确定所述每个候选队列是否为拖车队列;若是,则针对所述拖车队列根据所述激光雷达在第二连续多帧采集的点云数据中所述拖车队列的多个目标对应所述点云数据的子集,创建拖车队列模型,所述拖车队列模型的运动状态与所述拖车队列的多个目标的运动状态一致。2.根据权利要求1所述的方法,其特征在于,所述对自动驾驶车辆上所装载的激光雷达采集的点云数据进行预处理,得到至少一个候选队列,包括:对所述激光雷达采集的点云数据进行聚类,得到多个聚类目标;从所述多个聚类目标中,确定相邻聚类目标的间距小于预设间距,且,数量大于或等于预设数量阈值的连续的多个候选目标,并根据所述多个候选目标得到所述候选队列。3.根据权利要求2所述的方法,其特征在于,在所述从所述多个聚类目标中,确定相邻聚类目标的间距小于预设间距,且,数量大于或等于预设数量阈值的连续的多个候选目标,并根据所述多个候选目标得到所述候选队列之前,包括:将所述多个聚类目标中,形状尺寸不满足预设尺寸条件的聚类目标进行滤除,得到多个初始目标;所述从所述多个聚类目标中,确定相邻聚类目标的间距小于预设间距,且,数量大于或等于预设数量阈值的连续的多个候选目标,并根据所述多个候选目标得到所述候选队列,包括:从所述多个初始目标中,确定相邻初始目标的间距小于预设间距,且数量大于或等于预设数量阈值的连续的所述多个候选目标,并根据所述多个候选目标得到所述候选队列。4.根据权利要求1所述的方法,其特征在于,所述根据所述每个候选队列的多个目标的运动状态,确定所述每个候选队列是否为拖车队列,包括:根据所述数据采集装置在所述第一连续多帧采集的点云数据中所述每个目标对应所述点云数据的子集,确定所述每个候选队列的所述多个目标在所述第一连续多帧的运动状态是否一致;将所述第一连续多帧中最后一帧点云数据中所述每个候选队列的所述多个目标对应所述点云数据子集输入预先训练的拖斗识别模型,确定所述每个候选队列的所述多个目标是否被识别为拖斗;若所述每个候选队列的所述多个目标在所述第一连续多帧的运动状态一致,且所述每个候选队列的所述多个目标被识别为拖斗,则确定所述每个候选队列为拖车队列;其中,所述拖斗识别模型为预先采用标注有拖斗信息的样本点云数据进行训练得到的模型。5.根据权利要求1所述的方法,其特征在于,所述针对所述拖车队列根据所述激光雷达在第二连续多帧采集的点云数据中所述拖车队列的多个目标对应所述点云数据的子集,创
建拖车队列模型,包括:判断在所述第二连续多帧采集的点云数据中是否均观测到所述拖车队列的多个目标对应所述点云数据的子集;若是,则根据所述第二连续多帧中最后一帧点云数据中所述拖车队列的多个目标对应所述点云数据的子集,创建所述拖车队列模型。6.根据权利要求5所述的方法,其特征在于,在所述根据所述第二连续多帧中最后一帧点云数据中所述拖车队列的多个目标对应所述点云数据的子集,创建所述拖车队列模型之后,所述方法还包括:根据所述激光雷达在所述第二连续多帧之后的每一帧采集的点云数据中所述拖车队列的多个目标对应所述点云数据的子集,更新所述拖车队列模型。7.根据权利要求1所述的方法,其特征在于,所述方法还包括:根据所述拖车队列模型的运动状态对所述拖车队列中的多个目标的运动状态进行矫正。8.一种拖车队列跟踪装置,其特征在于,所述装置包括:预处理模块,用于对自动驾驶车辆上所装载的激光雷达采集的点云数据进行预处理,得到至少一个候选队列,每个候选队列包括多个目标,每个目标对应所述点云数据的子集;运动状态计算模块,根据所述激光雷达在第一连续多帧采集的点云数据中所述每个目标对应所述点云数据的子集,确定所述每个目标的运动状态;拖车队列确定模块,用于根据所述每个候选队列的多个目标的运动状态,确定所述每个候选队列是否为拖车队列;模型创建模块,用于若所述每个候选队列是拖车队列,则针对所述拖车队列根据所述激光雷达在第二连续多帧采集的点云数据中所述拖车队列的多个目标对应所述点云数据的子集,创建拖车队列模型,所述拖车队列模型的运动状态与所述拖车队列的多个目标的运动状态一致。9.一种计算机设备,其特征在于,包括:处理器、存储器,所述存储器中存储有所述处理器可执行的程序指令,当所述计算机设备运行时,所述处理器执行所述存储器中存储的所述程序指令,以执行如权利要求1至7任一所述的拖车队列跟踪方法的步骤。10.一种存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序被处理器运行时以执行如权利要求1至7任一所述的拖车队列跟踪方法的步骤。
技术总结
本发明提供一种拖车队列跟踪方法、装置、计算机设备及存储介质,涉及激光雷达感知技术领域。该方法包括:对自动驾驶车辆上装载的激光雷达采集的点云数据进行预处理,得到至少一个候选队列,每个候选队列包括多个目标,每个目标对应点云数据的子集;根据激光雷达在第一连续多帧采集的点云数据中每个目标对应点云数据的子集,确定每个目标的运动状态;根据每个候选队列的多个目标的运动状态,确定每个候选队列是否为拖车队列;若是,则针对拖车队列根据激光雷达在第二连续多帧采集的点云数据中拖车队列的多个目标对应点云数据的子集,创建拖车队列模型。通过本发明可更准确、更稳定地对拖车队列的运动状态进行跟踪。地对拖车队列的运动状态进行跟踪。地对拖车队列的运动状态进行跟踪。
技术研发人员:操小飞 张丹
受保护的技术使用者:驭势科技(北京)有限公司
技术研发日:2021.12.30
技术公布日:2022/4/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。