1.本发明涉及能量回收技术领域,特别是一种馈能减震器回收功率的计算方法。
背景技术:
2.在目前倡导节能减排的大环境下,既可以实现车辆减振,又能够回收车辆振动能量的馈能减震器的研究显得意义重大。齿轮齿条式馈能减震器的工作原理是当汽车在行驶过程中,齿轮齿条机构将车身的垂直振动转化为旋转运动,驱动发电机发电,并将电能存放在储能装置中,可供自动控制系统、灯光照明等系统二次应用。汽车的性能越优越,需要的电量就越多,提高馈能减震器的回收功率可以降低发动机的负担,减少油耗。现有技术中,对馈能减振器的回收功率通过仿真或实验推导得到某一具体数值,当减振器的参数发生改变时,需要改变模型,重新进行仿真或实验才能得到回收功率。
技术实现要素:
3.本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
4.鉴于上述和/或现有的回收功率计算中存在的问题,提出了本发明。
5.因此,本发明的目的是提供一种馈能减震器回收功率的计算方法,使用本发明能提高减震器回收功率的计算效率。
6.为解决上述技术问题,本发明提供如下技术方案:一种馈能减震器回收功率的计算方法,其包括以下步骤,
7.建立功率键合图模型;
8.根据功率键合图模型,推导出功率键合图模型的状态方程;
9.根据状态方程,建立减震器的数学模型;
10.根据键合图元和方块图单元的对应关系,将键合图模型转换成方块图;
11.根据数学模型和方块图,在软件中建立动态仿真模型,计算回收功率;
12.根据动态仿真模型中的输入量,在软件中分析其对回收功率的影响,筛选出贡献较大的参数。
13.作为本发明所述馈能减震器回收功率的计算方法的一种优选方案,其中:所述减震器包括减振连接座和馈能电机,所述减振连接座上可转动地连接有第一传动轴和第二传动轴,所述第一传动轴上连接有转动齿轮和第一传动齿轮,所述第二传动轴上连接有第二传动齿轮,减振连接座上可滑动地连接有减振齿条,所述第一传动齿轮和第二传动齿轮分别与减振齿条啮合,所述馈能电机上连接有输出轴,伸出减振连接座的第一传动轴经联轴器和输出轴连接,所述减振齿条的移动方向改变时,第一传动轴的转动方向不变。
14.作为本发明所述馈能减震器回收功率的计算方法的一种优选方案,其中:作用在减振齿条上的力为,
[0015][0016]
x=a
·
sin(2π
·f·
t);
[0017][0018][0019]
馈能电机的输出轴上的电磁转矩为
[0020][0021]
其中,jg是齿轮的转动惯量,jm是发电机转子的转动惯量,i是齿轮箱传动比,η是机械效率,r是齿轮分度圆半径,mr是减振齿条的质量,k
t
是电机的转矩常数,ke是电机的反电动势常数,r
ex
是外接电阻,r
in
是电机内部负载,a是位移振幅,f是频率,t是时间。
[0022]
作为本发明所述馈能减震器回收功率的计算方法的一种优选方案,其中:当减振齿条移动依次经第二传动齿轮和转动齿轮带动输出轴定向旋转时,定义该模式为模式一,设定系统的状态变量
[0023]
x=[p
3 q
5 p
11 q
14 p
17 q
19 p
22
]
t
;
[0024]
其中,p3是减振齿条的广义动量,p
11
是第二传动齿轮的广义动量,p
17
是转动齿轮的广义动量,p
22
是联轴器的广义动量,q5、q
14
、q
19
分别是第5、14、19键上对应的位移;
[0025]
设定系统的输入变量
[0026]
u=[se
1 se
23
]
t
[0027]se1
是驱动齿条运动的输入力,s
e23
是发电机的电磁转矩。
[0028]
作为本发明所述馈能减震器回收功率的计算方法的一种优选方案,其中:功率键合图模型中,根据积分因果关系,储能元件的特性方程为,
[0029][0030]
其中,f3、f
11
、f
17
、f
22
分别是键合图模型第3、11、17、22键上对应的流变量,e5、e
14
、e
19
分别是键合图模型第5、14、19键上对应的势变量,i3是减振齿条转动惯量的功率键合图元素,c5为齿条刚度系数的功率键合图元素,i
11
是第二传动齿轮转动惯量的功率键合图元
素,c
14
是转动齿轮刚度系数的功率键合图元素,i
17
是转动齿轮转动惯量的功率键合图元素,c
19
是联轴器刚度系数的功率键合图元素,i
22
是联轴器转动惯量的功率键合图元素;
[0031]
根据微分因果关系,储能元件的特性方程为,
[0032]
q8=c8·
e8;
[0033]
其中,q8是第8键上对应的广义位移,c8是齿轮3刚度系数的功率键合图元素,e8是键合图模型第8键上对应的势变量。
[0034]
作为本发明所述馈能减震器回收功率的计算方法的一种优选方案,其中:根据键合图模型可得,
[0035]
e8=e7=m1·
e6=m1·
e5;
[0036]
其中,e7和e8是键合图模型第7、8键上对应的势变量,m1是减振齿条和第二传动齿轮的转换系数;
[0037][0038]
上式的导数方程可以表示为,
[0039][0040]
其中,和是键合图模型广义位移的一阶导数;
[0041]
键合图模型中,阻性元件的特性方程为,
[0042][0043]
其中,e2、e
10
、e
16
、e
21
是键合图模型第2、10、16、21键上对应的势变量,r2是减振齿条阻尼系数的功率键合图元素,r
10
是第二传动齿轮阻尼系数的功率键合图元素,r
16
是转动齿轮阻尼系数的功率键合图元素,r
21
是联轴器阻尼系数的功率键合图元素,f2、f
10
、f
16
、f
21
是键合图模型第2、10、16、21键上对应的流变量;
[0044]
根据键合图模型中各部件的因果关系和流动方向,得到,
[0045][0046]
其中,e4、e9、e
12
、e
15
、e
18
、e
20
是键合图模型第4、9、12、15、18、20键上对应的势变量,f4、f5、f6、f7、f8、f
13
、f
14
、f
15
、f
18
、f
19
、f
20
是第4、5、6、7、8、13、14、15、18、19、20键上对应的流变量;
[0047]
对上面的方程进行积分和简化,得到模式一下的状态方程为,
[0048][0049]
作为本发明所述馈能减震器回收功率的计算方法的一种优选方案,其中:所述减震器在模式一下的数学模型为,
[0050][0051]
本发明的有益效果:本发明中通过创造性的得到力和电磁力矩的计算公式,对系统进行量化,将非线性系统转换为框图的形式,更加直观的反应各个参数间的关系,使用时,只需修改仿真参数,就能直接导出回收功率的值,提高计算效率。
附图说明
[0052]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
[0053]
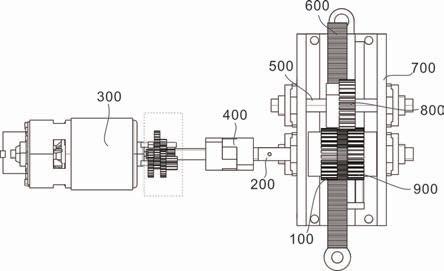
图1为本发明中减震器的结构图。
[0054]
图2为本发明中减震器在模式二下的功率键合图模型。
[0055]
图3为本发明中减震器在模式一下的功率键合图模型。
[0056]
图4为本发明中键合图元和方块图单元的对应关系。
[0057]
图5为本发明中减震器在模式一下的方块图。
[0058]
图6为本发明中减震器在模式二的方块图。
[0059]
图7为本发明中减震器在模式一下的动态仿真模型。
[0060]
图8为本发明中减震器在模式二下的动态仿真模型。
[0061]
图9为使用本发明优化前和优化后的仿真结果对比图。
[0062]
其中,100第一传动齿轮,200第一传动轴,300馈能电机,400联轴器,500第二传动轴,600减振齿条,700减振连接座,800第二传齿轮,900转动齿轮。
具体实施方式
[0063]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图对本发明的具体实施方式做详细的说明。
[0064]
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
[0065]
其次,此处所称的“一个实施例”或“实施例”是指可包含于本发明至少一个实现方式中的特定特征、结构或特性。在本说明书中不同地方出现的“在一个实施例中”并非均指同一个实施例,也不是单独的或选择性的与其他实施例互相排斥的实施例。
[0066]
实施例1
[0067]
参照图1~图8,为本发明的第一个实施例,该实施例提供了一种馈能减震器回收功率的计算方法,使用本发明时,只需修改仿真参数,就能直接导出回收功率的值,提高计算效率。
[0068]
一种馈能减震器回收功率的计算方法,减震器包括减振连接座和馈能电机,所述减振连接座上可转动地连接有第一传动轴和第二传动轴,所述第一传动轴上连接有转动齿轮和第一传动齿轮,所述第二传动轴上连接有第二传动齿轮,减振连接座上可滑动地连接有减振齿条,所述第一传动齿轮和第二传动齿轮分别与减振齿条啮合,所述馈能电机上连接有输出轴,伸出减振连接座的第一传动轴经联轴器和输出轴连接,所述减振齿条的移动方向改变时,第一传动轴的转动方向不变;减震器有两种工作模式,模式一为,减振齿条依次经第二传动齿轮和转动齿轮带动第一传动轴转动,第一传动齿轮在第一传动轴上空转,馈能电机的输出轴定向旋转;模式二为,减振齿条经第一传动齿轮带动第一传动轴转动,此时转动齿轮在第一传动轴上空转,馈能电机的输出轴定向旋转;
[0069]
其包括以下步骤,
[0070]
(1)建立功率键合图模型;
[0071]
(2)根据功率键合图模型,推导出功率键合图模型的状态方程,具体为,作用在减振齿条上的力为,
[0072][0073]
x=a
·
sin(2π
·f·
t);
[0074][0075][0076]
馈能电机的输出轴上的电磁转矩为
[0077][0078]
其中,jg是齿轮的转动惯量,jm是发电机转子的转动惯量,i是齿轮箱传动比,η是机械效率,r是齿轮分度圆半径,mr是减振齿条的质量,k
t
是电机的转矩常数,ke是电机的反电动势常数,r
ex
是外接电阻,r
in
是电机内部负载,a是位移振幅,f是频率,t是时间。
[0079]
得到模式一下的状态方程,具体为,
[0080]
在模式一下的功率键合图模型中有8个储能元件,其中,惯性元件i3,i
11
,i
17
,i
22
和容性元件c5、c
14
、c
19
为积分因果关系,c8为微分因果关系;
[0081]
设定系统的状态变量
[0082]
x=[p
3 q
5 p
11 q
14 p
17 q
19 p
22
]
t
;
[0083]
其中,p3是减振齿条的广义动量,p
11
是第二传动齿轮的广义动量,p
17
是转动齿轮的广义动量,p
22
是联轴器的广义动量,q5、q
14
、q
19
分别是第5、14、19键上对应的位移;
[0084]
设定系统的输入变量
[0085]
u=[se
1 se
23
]
t
[0086]se1
是驱动齿条运动的输入力,s
e23
是发电机的电磁转矩。
[0087]
根据积分因果关系,储能元件的特性方程为,
[0088][0089]
其中,f3、f
11
、f
17
、f
22
分别是键合图模型第3、11、17、22键上对应的流变量,e5、e
14
、e
19
分别是键合图模型第5、14、19键上对应的势变量,i3是减振齿条转动惯量的功率键合图元素,c5为齿条刚度系数的功率键合图元素,i
11
是第二传动齿轮转动惯量的功率键合图元素,c
14
是转动齿轮刚度系数的功率键合图元素,i
17
是转动齿轮转动惯量的功率键合图元素,c
19
是联轴器刚度系数的功率键合图元素,i
22
是联轴器转动惯量的功率键合图元素;
[0090]
根据微分因果关系,储能元件的特性方程为,
[0091]
q8=c8·
e8;
[0092]
其中,q8是第8键上对应的广义位移,c8是齿轮3刚度系数的功率键合图元素,e8是键合图模型第8键上对应的势变量;
[0093]
根据键合图模型可得,
[0094]
e8=e7=m1·
e6=m1·
e5;
[0095]
其中,e7和e8是键合图模型第7、8键上对应的势变量,m1是减振齿条和第二传动齿轮的转换系数;
[0096][0097]
上式的导数方程可以表示为,
[0098][0099]
其中,和是键合图模型广义位移的一阶导数;
[0100]
键合图模型中,阻性元件的特性方程为,
[0101][0102]
其中,e2、e
10
、e
16
、e
21
是键合图模型第2、10、16、21键上对应的势变量,r2是减振齿条阻尼系数的功率键合图元素,r
10
是第二传动齿轮阻尼系数的功率键合图元素,r
16
是转动齿轮阻尼系数的功率键合图元素,r
21
是联轴器阻尼系数的功率键合图元素,f2、f
10
、f
16
、f
21
是键合图模型第2、10、16、21键上对应的流变量;
[0103]
根据键合图模型中各部件的因果关系和流动方向,得到,
[0104][0105]
其中,e4、e9、e
12
、e
15
、e
18
、e
20
是键合图模型第4、9、12、15、18、20键上对应的势变量,f4、f5、f6、f7、f8、f
13
、f
14
、f
15
、f
18
、f
19
、f
20
是第4、5、6、7、8、13、14、15、18、19、20键上对应的流变量;
[0106]
对上面的方程进行积分和简化,得到模式一下的状态方程为,
[0107][0108]
减震器在模式二下,得到其状态方程具体为,
[0109]
x=[p
3 q
5 p
11 q
13 p
16
]
t
;
[0110]
其中,p3是齿条的广义动量,p
11
是第一传动齿轮的广义动量,p16是联轴器的广义动量,q5、q13分别是键合图中第5、13键上对应的位移;
[0111]
设定系统的输入变量,
[0112]
u==[se
1 se
17
]
t
;
[0113]
其中,s
e1
是驱动减振齿条运动的输入力,s
e17
是发电机的电磁转矩;
[0114]
根据积分因果关系,得到储能元件的特性方程,
[0115][0116]
其中,f3、f
11
、f
16
分别是键合图模型第3、11、16键上对应的流变量,e5、e
13
分别是键合图模型第5、13键上对应的势变量,i3是减振齿条转动惯量的功率键合图元素,c5为减振齿条刚度系数的功率键合图元素,i
11
是第一传动齿轮转动惯量的功率键合图元素,c
13
是联轴器刚度系数的功率键合图元素,i
16
是联轴器转动惯量的功率键合图元素;
[0117]
根据微分因果关系,得到储能元件的特性方程,
[0118]
q8=c8·
e8;
[0119]
其中q8是第8键上对应的广义位移,c8是第一传动齿轮刚度系数的功率键合图元素,e8是键合图模型第8键上对应的势变量;
[0120]
由功率键合图模型可得,
[0121]
e8=e7=m
·
e6=m
·
e5;
[0122]
其中,e7和e8是键合图模型第7、8键上对应的势变量,m是减振齿条和第一传动齿轮
的转换系数;
[0123]
可得,
[0124][0125]
导数方程可以表示为,
[0126][0127]
其中,和是键合图模型广义位移的一阶导数;
[0128]
阻性元件的特性方程为,
[0129][0130]
其中,e2、e
10
、e
15
是键合图模型第2、10、15键上对应的势变量,r2是减振齿条阻尼系数的功率键合图元素,r
10
是第一传动齿轮阻尼系数的功率键合图元素,r
15
是联轴器阻尼系数的功率键合图元素,f2、f
10
、f
15
是键合图模型第2、10、15键上对应的流变量;
[0131]
根据功率键合图中各部件的因果关系和流动方向,可以得到,
[0132][0133]
其中,e3、e4、e9、e
11
、e
12
、e
14
、e
16
是键合图模型第3、4、9、11、12、14、16键上对应的势变量,f4、f5、f6、f7、f8、f
12
、f
13
、f
14
是第4、5、6、7、8、12、13、14键上对应的流变量;
[0134]
对方程式进行积分和简化,得到馈能减震器在模式二下的状态方程,
[0135][0136]
(3)根据状态方程,建立减震器的数学模型,减震器在模式一下的数学模型为,
[0137][0138]
减震器在模式一下的数学模型为,
[0139][0140]
(4)根据键合图元和方块图单元的对应关系,将键合图模型转换成方块图;
[0141]
(5)根据数学模型和方块图,在matlab-simulink中建立动态仿真模型,计算回收功率;
[0142]
(6)根据动态仿真模型中的输入量,在matlab中分析其对回收功率的影响,筛选出贡献较大的参数。
[0143]
本发明的有益效果:本发明中创造性的得到力和电磁力矩的计算公式,对系统进行量化,将非线性系统转换为框图的形式,更加直观的反应各个参数间的关系,使用时,只需修改仿真参数,就能直接导出回收功率的值,提高计算效率。
[0144]
实施例2
[0145]
为本发明的第二个实施例,该本实施例提供了一种馈能减震器回收功率的计算方法,本实施例针对特定的减震器进行仿真模拟,具体为,在matlab-simulink中,采用图形模块建模方法,用自定义模块表示每个键合图元,阻性元件r的框图单元用gain模块表示,0结和1结都用add模块表示,变换器tf用两个gain模块表示,具有积分因果关系的容性元件c和惯性元件i用积分模块表示,具有微分因果关系的容性元件c和惯性元件i用微分模块表示,采用ode45法求解,运行仿真程序,仿真参数如表1所示
[0146]
表1仿真参数
[0147]
[0148][0149]
在matlab中分析各参数对回收功率的影响,筛选出贡献较大的参数,具体为,
[0150]
1)定义力函数、电磁转矩函数,
[0151]
定义力函数:
[0152]
y=(((x(1) x(2)*x(3)*x(3)/x(4))/(x(5))^2) x(6))*(-x(12))*sin(2*pi*x(11)*1)*4*pi*pi*(x(11))^2 ((x(3))^2*x(7)*x(8)/x(5)/x(5)/x(4)/x(9))*x(12)*cos(2*pi*x(11)*1)*2*pi*x(11);
[0153]
定义电磁转矩函数:
[0154]
y=(60*x(7)*x(8)*x(3)/(x(9) x(10))/x(5))*x(12)*cos(2*pi*x(11)*1)*2*pi*x(11);
[0155]
2)给定变量范围:var min为x(1)、x(2)、
······
、x(12)这12个变量的下限,var max为x(1)、x(2)、
······
、x(12)这12个变量的上限;
[0156]
3)生成样本空间r:调用sobol函数,生成3000*24(即3000行24列)的样本矩阵;
[0157]
4)拆分样本空间r:将矩阵r拆为矩阵a和矩阵b,其中矩阵a为矩阵r的前12列,矩阵b为矩阵r的后12列;
[0158]
5)构造样本矩阵的矩阵ab:根据矩阵a、矩阵b构造矩阵ab,即用矩阵b中的第i列替换矩阵a的第i列,替换12次,得到矩阵ab1、ab2、ab3、
······
、ab
12
;
[0159]
6)计算步骤1)中的y值:经过上述步骤,构造了a、b、ab1、ab2、
······
、ab
12
这14个3000行12列的矩阵,共有42000组y值,依次代入力函数和电磁转矩函数,得到对应的y值矩阵,分别为ya、yb、yab1、
······
、yab12;;
[0160]
7)求解一阶影响指数s:s=var x(i)/var y;
[0161]
其中,var y为样本空间r总体的方差:var y=var(ya yb),即为ya和yb组成的新矩阵;
[0162]
var x(i)为变量x(i)对样本空间r输出的总体方差的影响:var x(i)=(1/3000)*(var x(i) yb(j)*(y
ab
(j,i)-ya(j))),i=1、2、3、
···
、12且j=1、2、3、
···
、3000;
[0163]
8)求解全局影响指数st,
[0164]
st=e x(i)/var y;
[0165]
其中,e x(i)为除了x(i),剩余变量对样本空间r输出的总体方差的影响,e x(i)=(1/6000)*e x(i) (ya(j)-y
ab
(j,i))^2,i=1,2,3,
······
,12且j=1,2,3,
······
,3000。
[0166]
求得各参数对馈能减震器回收功率的敏感度如下表所示,
[0167]
表2馈能减震器回收功率参数敏感性分析结果
[0168][0169]sfr
、st
fr
分别表示各参数对齿条上驱动力的一阶影响指数和全局影响指数,s
tem
、st
tem
分别表示各参数对电磁转矩的一阶影响指数和全局影响指数,在给定工况下,通过分析参数对优化目标的敏感性,找出了较为敏感的参数:振动频率f、位移振幅a、外接电阻rex、反电动势常数ke、转矩常数kt、齿轮分度圆半径r、齿条质量mr、齿轮箱传动比i,通过以上多目标优化方法对减震器回收功率进行优化,较全面的分析各参数对输出功率的影响,并筛选出较为敏感的参数回带入simulink模型中进行二次仿真,获得优化后的结果,大大缩短优化时间;为减震器的后续研发工作提供理论依据。
[0170]
从图9中可以看出,通过本发明的计算方法,回收功率明显提高,说明筛选出的参数对馈能减震器的回收功率有较大影响,验证了计算方法的正确性,也为提高减震器馈能效率的研究提供理论依据。
[0171]
应说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。