1.本公开涉及电动机(electric motor)控制。
背景技术:
2.包括混合动力电动车辆的电动车辆包括至少一个用于产生推进力的旋转牵引电动机。无刷交流电动机是推进电动机的普遍选择。交流电动机包括定子,该定子包括一相或多相交流电。通常,交流推进电动机是多相的,并利用三相或更多相的交流电以在定子中产生旋转磁场,以驱动电动机的转子。
3.电动和混合动力车辆可包括高压(hv)能量存储设备(esd),用于提供动力以驱动推进电动机和低压(lv)应用。esd通常是电化学设备。逆变器用于将esd的直流(dc)电转换为交流(ac)电,以通过旋转磁场来驱动推进电动机。逆变器可以是双向的,并且被操作以将来自以再生模式操作的推进电动机的交流电转换成直流电,该直流电被返回给esd。同样,逆变器可用于esd批量充电。逆变器可以具有多个固态切换器件,这些固态切换器件以较高的切换频率工作,以合成高质量的交流电压和电流,以供推进电动机使用。
4.已知逆变器切换频率在多相母线结构、推进电动机、推进驱动单元和任何其他机械联接的结构(包括最终驱动器、车轴和车辆结构)中引起可听见的噪声。这种由逆变器引起的噪声主要在逆变器的切换频率和某些邻近的边带处,并且可能具有高音调和尖锐的音调,因此通常是令人讨厌的。噪声、振动、刺耳性(harshness)专家竭尽全力来消除这种噪声,因为许多最终用户可能会在汽车环境中发现这种噪声令人反感且不直观。但是,尽管在噪音隔离和去联接(decoupling)方面取得一些成功是可能的,但一定程度的噪音不可避免地会联接到车辆的乘客厢中,并会到达乘员的耳朵。
技术实现要素:
5.在一个示例性实施例中,一种装置可以包括具有速度操作范围的交流电动机、直流电源、可操作地联接在直流电源和交流电动机之间用于将直流电转换成交流电以驱动交流电动机的逆变器,以及可操作地联接到逆变器并被配置为将交流电动机速度操作范围解析为多个速度区域的处理器,并且在每个速度区域内操作逆变器到相应的预定切换频率分布(switching frequencyprofile),以将逆变器脉冲比保持到相应的预定脉冲比分布。
6.除了本文描述的一个或多个特征之外,脉冲比分布可以包括线性分布。
7.除了本文描述的一个或多个特征之外,脉冲比率分布可以包括固定值分布。
8.除了本文描述的一个或多个特征之外,切换频率分布可以在相邻的速度区域中产生连续的切换阶次(switching order)。
9.除了本文描述的一个或多个特征之外,切换频率分布可以在相邻的速度区域中产生不连续的切换阶次。
10.除了本文描述的一个或多个特征之外,预定的切换频率分布可以包括频率抖动。
11.除了本文描述的一个或多个特征之外,该装置还可包括处理器,该处理器被配置
为在每个速度区域内的多个预定切换频率分布之间操作逆变器。
12.除了本文描述的一个或多个特征之外,切换频率分布可以被限制为预定的上限和下限之间的频率。
13.除了本文描述的一个或多个特征之外,该装置还可包括处理器,该处理器被配置为在当ac电动机速度低于预定下限时以固定的切换频率操作逆变器。
14.除了本文描述的一个或多个特征之外,该装置还可以包括处理器,该处理器被配置为将逆变器的操作限制在高于预定下限的切换频率。
15.在另一示例性实施例中,一种方法可以包括通过以与转子速度成比例地变化的切换频率来操作逆变器,利用逆变器的输出在操作速度范围内旋转交流电动机的转子。操作速度范围可以被解析成多个速度区域,并且每个操作速度区域内的切换频率可以对应于与对应于相邻速度区域的相应脉冲比不同的相应脉冲比。
16.除了本文所述的一个或多个特征之外,切换频率还可以在相邻的操作速度区域中产生连续的切换阶次。
17.除了本文所述的一个或多个特征之外,切换频率还可以在相邻的操作速度区域中产生不连续的切换阶次。
18.除了本文所述的一个或多个特征之外,切换频率还可包括频率抖动。
19.在又一示例性实施例中,一种方法可以包括将ac电动机速度操作范围解析为多个速度区域,并且在每个速度区域内,将可操作地联接至ac电动机的逆变器操作到相应的预定切换频率分布,以将逆变器脉冲比保持到相应的预定脉冲比分布。
20.除了本文描述的一个或多个特征之外,脉冲比分布可以包括固定值分布。
21.除了本文描述的一个或多个特征之外,切换频率分布可以在相邻的速度区域中产生连续的切换阶次。
22.除了本文描述的一个或多个特征之外,切换频率分布还可以在相邻的速度区域中产生不连续的切换阶次。
23.除了本文描述的一个或多个特征之外,预定的切换频率分布可以包括频率抖动。
24.当结合附图考虑时,根据以下详细描述,本公开的上述特征和优点以及其他特征和优点将显而易见。
附图说明
25.其他特征、优点和细节仅作为示例出现在以下详细描述中,该详细描述参考附图,在附图中:
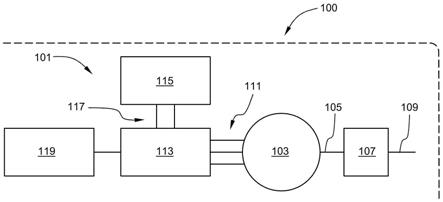
26.图1示出了根据本公开的车辆的示例性推进系统;
27.图2示出了根据本公开的当推进系统的逆变器以固定频率操作时的电动机速度对噪声频率的图示;
28.图3示出了根据本公开的当推进系统的逆变器以固定脉冲比操作时的电动机速度对噪声频率的图示;
29.图4示出了根据本公开的当推进系统的逆变器在固定脉冲比的离散带内操作时的逆变器切换频率对电动机速度的图示(plot);
30.图5示出了根据本公开的当推进系统的逆变器以多个固定脉冲比操作时的电动机
速度对噪声频率的图示;
31.图6示出了根据本公开的当推进系统的逆变器以多个固定脉冲比操作时的噪声频率对电动机速度的图示;
32.图7示出了根据本公开的当推进系统的逆变器在固定脉冲比的离散带内操作时的逆变器切换频率对电动机速度的图示;
33.图8示出了根据本公开的当推进系统的逆变器以多个固定脉冲比操作时的噪声频率对电动机速度的图示;和
34.图9示出了根据本公开的当推进系统的逆变器在固定脉冲比的离散带内操作时的逆变器切换频率对电动机速度的图示。
具体实施方式
35.以下描述本质上仅是示例性的,并不旨在限制本公开、其应用或用途。在所有附图中,相应的附图标记表示相同或相应的部件和特征。
36.如本文中所使用的,控制模块、模块、控件,控制器、控制单元、电子控制单元、处理器和类似术语是指以下中的任何一个或一个或多个的各种组合:专用集成电路(asic)、电子电路、中央处理单元(优选地微处理器) 以及相关的存储器和存储设备(只读存储器(rom)、随机存取存储器(ram)、电可编程只读存储器(eprom)、硬盘驱动器等)或执行一个或多个软件或固件程序或例程的微控制器、组合逻辑电路、输入/输出电路和设备(i/o) 以及适当的信号调节和缓冲电路、高速时钟、模数转换器(a/d)和数模(d/a) 电路以及提供所描述的功能的其他部件。控制模块可以包括各种通信接口,包括点对点或离散线路,以及到车辆控制器局域网、工厂内和与服务有关的网络上的到包括广域网和局域网在内的网络的有线或无线接口。如本公开中阐述的控制模块的功能可以在多个网络控制模块之间的分布式控制架构中执行。软件、固件、程序、指令、例程、代码、算法和类似术语表示任何控制器可执行指令集,包括校准、数据结构和查找表。控制模块具有一组执行的控制例程,以提供所描述的功能。例程例如由中央处理单元执行,并且可操作以监视来自感测设备和其他联网的控制模块的输入,并执行控制和诊断例程以控制致动器的操作。例程可以在正在进行的发动机和车辆操作期间以规则的间隔执行。可替代地,可以响应于事件的发生、软件调用或者根据需要经由用户界面输入或请求来执行例程。
37.图1示出了车辆100的示例性推进系统101。推进系统101可以包括不同复杂性、部件和集成的电驱动单元(edu)。示例性高度集成的edu可包括,例如,电动机、减速和差动传动装置、包括空气和液体冷却特征的壳体、电气总线结构、hv总线结构、电力电子设备(例如,逆变器)、控制器和其他相关部件。推进系统101可以包括具有电动机输出轴105的交流电机(以下称为交流电动机)103。马达输出轴105可以在交流电动机103和其他传动系统部件之间传递扭矩,例如最终传动装置107,其可以包括减速和差动齿轮组以及一个或多个轴输出。最终传动装置107可以简单地包括减速齿轮和联接到差动齿轮组的传动轴输出。一个或多个轴109可以联接到最终传动装置 107或差动齿轮组,如果它们分开的话。轴109可联接到车轮上,用于在车轮和路面之间传递牵引力。本领域的普通技术人员将认识到传动系统部件的替代布置,包括车轮马达布置或最终传动齿轮组,其包括除车轴或传动轴输出装置(take off)之外的附加动力输出装置。无论应用布置如何,传动系统部件都可以有效地
在一个或多个车轮和路面之间传递马达扭矩。
38.交流电动机103可以是多相交流电动机,例如通过联接到逆变器113的交流总线111接收三相交流功率的三相交流电动机。逆变器113可以包括多个固态切换,例如igbt和功率mosfet。逆变器113从能量存储设备115 接收高压(hv)dc总线117上的直流电,例如在400伏下。控制器119联接到逆变器用于控制逆变器。
39.逆变器113的控制可以包括固态切换器件的高频切换。许多设计和应用考虑和限制决定了逆变器的切换频率。通常,用于交流电动机应用的逆变器控制可包括固定的切换频率,例如切换频率约为10-12千赫。因此,此类应用中的逆变器切换频率设计为保持静态。逆变器感应噪声,主要受逆变器113 切换频率的影响,即使交流电动机速度变化,其音调也基本保持恒定。图2 示出了图1的推进系统101的edu的示例性实施例的近场噪声,逆变器113 以10khz的固定频率操作。竖直轴201代表交流电动机103的每分钟转数 (rpm)的速度,水平轴203代表单位为赫兹(hz)的噪声频率。当交流电动机103以从大约0rpm到大约8,000rpm的操作速度扫过时,在近场中测量的声音被表示为声音空间205内以分贝为单位的声压级(spl),声音空间205 由从0到8,000rpm和从0到13千赫的噪声频率限定。出于本公开的目的,如从图例207中所理解的,声音空间205在三个spl范围被粗略量化:低(0 到45db);中等(40至70分贝)和高(65至100分贝)。可以理解,声音空间 205的大部分由弯曲扫过(sweep)210指示的低spl范围表示。然而,存在局部主导(dominant)spl的模式,包括一阶(primary order)209和边带阶 (sideband order)211。这种局部主导的spl的模式在这里通常可以被称为切换阶次。一阶209相对于绝对spl可以是主导的,二阶、三阶和更高阶的声压级通常随着阶数的升高而衰减。为了说明的目的,一阶209和边带阶211 被示出为由代表频率主导的中等spl表征。声音空间205的剩余部分展示了由低spl范围表示的频率。虽然一阶209和边带阶211被示出为以中等 spl为特征,但是由此预期一阶209通常将主导具有更大spl的边带阶211。因此,从图2可以理解,对于给定的固定逆变器频率,一阶209在所有交流电动机103速度上保持频率不变。一些频移可能出现在边带阶211;然而,即使交流电动机速度103由于一阶209的spl主导而变化,逆变器感应噪声的感知频率在音调或音调上保持基本恒定。
40.图3示出了图1的推进系统101的edu的示例性实施例的近场噪声,逆变器113在从0rpm至8000rpm的整个交流电动机103操作速度范围内以固定脉冲比(pr)操作。如本文所用和本领域普通技术人员所理解的,脉冲比(pr)是逆变器113切换频率与交流电动机103的基本电频率之比。交流电动机103的基本电频率与交流电动机103rpm及其极数成比例。因此,随着交流电动机103rpm变化,基本电频率也随之变化。因此,固定的 pr要求随着ac电动机103rpm的改变,逆变器113的切换频率必须成比例地改变。图3示出了类似于图2中的声音空间205的声音空间305。在图 2中,交流电动机速度轴301和噪声频率轴303分别类似于图2中的轴201 和203。图3还包括具有与图2中阐述并在此讨论的相同的量化的spl范围的图例307。在图3中,然而,当ac电动机103以从大约0rpm到大约 8,000rpm的操作速度扫过时,pr被控制为恒定的。在近场中测量的合成声音表示为声音空间305中以分贝(db)为单位的声压级(spl)。切换阶次由声音空间305中的对角线模式表示,主导切换阶次通常对应于参考图例307 的较高的spl范围。主导切换阶次通常对应于一阶和某些较低阶边带。实验结果表明,一阶边带(primary sideband)和三阶边带(即 /-3)通常是主导的。图4示出了某些示例
性线性逆变器103的切换频率分布(profiles)406a、 406b、406c和406d以及相应的对应的pr分布408a、408b、408c和408d。左竖直轴402表示逆变器113的切换频率,单位为赫兹(hz);右竖直轴404 表示脉冲比(pr)以及水平轴401表示交流电动机103的每分钟转数(rpm) 的速度。
41.在一个实施例中,pr分布可以是线性分布,其中pr值线性变化。在一个实施例中,线性pr分布可以具有固定值。逆变器113切换频率分布406c 例如对应于pr分布408c,并且是在基本上交流电动机103的整个速度谱上产生如图3的声音空间305中所示的主导切换阶次时实现的pr分布。由此,从图3可以理解,对于给定的固定值pr分布,主导切换阶次的特征在于频率随ac电动机103rpm线性变化。以类似方式实现的替代pr分布,例如 408a、408b或408d,也会产生主导切换阶次,但在声音空间305中的不同区域中是主导的。
42.在一个实施例中,ac电动机103的操作速度可以被定义为基本上不同的速度区域。例如,图4示出了从大约500rpm到大约2,000rpm的速度区域410a,从大约2,000rpm到大约4,000rpm的速度区域410b,从大约 4,000rpm到大约6,000rpm的速度区域410c,以及从大约6,000rpm到大约8,000rpm的速度区域410d。控制器119可以在每个速度区域410a、 410b、410c和410d内实现不同的切换频率分布。在本实施例中,选择固定值pr分布408a、408b、408c和408d,使得每个相应的固定值pr分布与相邻的固定值pr分布变化相同的量。因此,当前示例性固定值pr分布值如下:408a=37.5;408b=31.5;408c=25.5;和408d=19.5。在一个实施例中,控制器119可在速度区域410a内的ac电动机103操作期间在逆变器113内实现切换频率分布406a(pr分布408a)。类似地,控制器119可以在速度区域410b内实现分布406b(pr分布408b),在速度区域410c内实现分布406c(pr分布408c),并且在速度区域410d内实现分布406d (pr分布408d)。图5示出了图1的推进系统101的edu的示例性实施例的近场噪声,逆变器113在从0rpm到8,000rpm的整个ac电动机103 操作速度范围内进行操作,其中逆变器113分别利用相应的切换频率分布 406a、406b、406c和406d在速度区域410a、410b、410c和410d内进行控制,如本文结合图4所描述的。图5示出了类似于图3中的声音空间305 的声音空间505,ac电动机速度轴501和噪声频率轴503分别类似于图3 中的轴301和303。图5还包括具有与图3中阐述和在此讨论的相同的量化 spl范围的图例507。在图5中,当ac电动机103扫过从大约0rpm到大约8,000rpm的操作速度时,遇到不同的速度区域410a、410b、410c和 410d,并且实现了相应的切换频率分布406a、406b、406c和406d。在近场中测得的合成声音表示为声音空间505中以分贝(db)为单位的声压级(spl)。切换阶次由声音空间505中的对角线模式表示,主导切换阶次通常对应于较高的spl范围,参考图例507。利用当前实现的切换频率分布406a、 406b、406c和406d对应于相应的等效分离的固定值pr分布408a、408b、 408c和408d,可以理解的是,主导切换阶次在每个相应速度区域内的频率局部地增加,总的主导切换阶次在增加的速度区域内的频率减小。此外,应当理解,在相邻速度区域410a、410b、410c和410d之间的过渡处的主导切换阶次具有明显变化的特征频率。这样的过渡可以被称为不连续过渡,并且相应的切换阶次被称为不连续相邻切换阶次。如本文所使用的关于不连续过渡和不连续相邻切换阶次的不连续性应理解为是指主导阶的频率间隔为约10%或更大。例如,在速度区域410a、410b之间的速度区域界面(interface) 515处,速度区域410a的主导切换阶次的终端频率高于大约4.5khz,而速度区域410b的主导切换阶次的初始频率低于大约3.5khz。类似地,在速度区域界面517和519处的各个主导切换阶次的终端
和初始频率对基本上是 (4.25khz、2.75khz)和(4.1khz、2.1khz)。
43.在一个实施例中,控制器119可以建立多个速度区域,其中控制器119 在每个速度区域内建立与每个其他速度区域内的固定值pr分布不同的预定固定值pr分布。在一个实施例中,速度区域是速度的等效范围,但不是必须的。在一个实施例中,在相邻速度区域中的固定值pr分布之间的间隔量值是相等的。在一个实施例中,相邻速度区域中的固定值pr分布之间的至少两个间隔量值是不相等的。在图6中,左竖直轴602表示逆变器113切换频率,其单位为赫兹(hz);右竖直轴604表示脉冲比(pr);以及水平轴 601表示交流电动机103的每分钟转数(rpm)的速度。图6将多个示例性固定值pr图示示为在竖直虚线之间示出的对应的多个ac电动机103速度区域内的粗体、水平虚线。图6将多个示例性切换频率分布进一步示出为在竖直虚线之间示出的对应的多个ac电动机103速度区域内的粗体、倾斜实线。控制器119可以在ac电动机103在各个速度区域内操作期间在逆变器 113内实现切换频率分布,作为由电动机速度和pr所参考的存储器中的查找功能。替代地,控制器119可以使用线性方程在各个速度区域内的ac电动机103操作期间在逆变器113内实现切换频率分布。图7示出了图1的推进系统101的edu的示例性实施例的近场噪声,逆变器113在整个ac电动机103的操作速度范围从0rpm到8,000rpm的范围内操作,其中逆变器113根据在此所述的图6进行控制。图7图示了类似于图3中的声音空间305 的声音空间705。图7还图示了分别类似于图3中的轴301和303的ac电动机速度轴701和噪声频率轴703。图7还包括具有在图3中阐述并在本文中讨论的相同的量化spl范围的图例707。在图7中,当ac电动机103扫过从大约0rpm到大约8,000rpm的操作速度时,遇到了不同的速度区域,并实现了相应的切换频率分布。在近场中测得的合成声音表示为声音空间 705中以分贝(db)为单位的声压级(spl)。切换阶次由声音空间705中的对角线模式表示,主导切换阶次通常对应于较高的spl范围,参考图例707。利用当前实现的切换频率分布对应于相应的固定值pr分布,可以理解的是,主导切换阶次在每个相应的速度区域内局部地增加频率,而总体的主导切换阶次在不断增加的速度区域内频率趋向于逐渐上升。此外,可以理解的是,在相邻速度区域之间的过渡处(由竖直虚线界定)的主导切换阶次的特征频率从最低rpm过渡处的约2,600hz的差异变化到最高rpm过渡处的约 1,500hz的差异。这样的过渡可以被称为不连续过渡,并且相应的切换阶次被称为不连续相邻切换阶次。
44.在图8中,左竖直轴802表示逆变器113的切换频率,以赫兹(hz)为单位;右竖直轴804表示脉冲比(pr);水平轴801表示交流电动机103的每分钟转数(rpm)的速度。图8将多个示例性固定值pr分布示出为在竖直虚线之间示出的对应的多个ac电动机103速度区域内的粗体、水平虚线。图8将多个示例性切换频率分布进一步示出为在竖直虚线之间示出的对应的多个ac电动机103速度区域内的粗体、倾斜实线。控制器119可以在ac 电动机103在各个速度区域内操作期间在逆变器113内实现切换频率分布,作为由电动机速度和pr所参考的存储器中的查找功能。替代地,控制器119 可以使用线性方程在各个速度区域内的ac电动机103操作期间在逆变器 113内实现切换频率分布。图9示出了图1的推进系统101的edu的示例性实施例的近场噪声,其中逆变器113在从0rpm到8,000rpm的整个ac 电动机103操作速度范围内操作,其中逆变器113根据如在本文所述的图8 进行控制。图9示出了类似于图3中的声音空间305的声音空间905。图9 还示出了分别与图3中的轴301和303类似的ac电动机速度轴901和噪声频率轴903。图9还包括图例907,其具有与图3所示和本文讨论的相同的
量化spl范围。在图9中,随着ac电动机103在从大约0rpm扫到大约8,000rpm的操作速度内扫过时,遇到了不同的速度区域,并实现了相应的切换频率分布。
45.在近场中测得的合成声音表示为声音空间905中以分贝(db)为单位的声压级(spl)。切换阶次由声音空间905中的对角线模式表示,主导切换阶次通常对应于较高的spl范围,参考图例907。利用当前实现的切换频率分布对应于各个固定值pr分布,可以理解的是,主导切换阶次在每个相应的速度区域内在频率上局部增加,而总体上主导切换阶次在速度增加的区域内的频率趋向于适度上升。此外,可以理解的是,在相邻速度区域之间的过渡处(由竖直虚线限定)的主导切换阶次具有紧密匹配的特征频率。如本文所使用的关于连续过渡和连续相邻切换阶次的连续性被理解为是指主导阶的频率间隔为约5%或更小。这样的过渡可以被称为连续过渡,并且相应的切换阶次被称为连续相邻切换阶次。可以理解的是,连续的相邻切换阶次不需要阶的绝对匹配,例如一个速度区域的一阶与相邻速度区域的一阶。相反,连续的相邻切换阶次或相邻区域之间的一阶的匹配被理解为例如包括边带阶和一阶的匹配,或者较低边带顺序与较高边带顺序的匹配。
46.在另一实施例中,例如,当ac电动机速度接近零时,本领域普通技术人员认识到严格地使用本文公开的技术对最小和最大逆变器切换频率的实际限制以及控制空间的不可用性。然而,例如,认识到可以采用频率偏移,该频率偏移限制了可用于控制的最低逆变器频率。例如,逆变器切换的2khz 下限可以这样来管理:通过保持其控制常数同时允许消除对pr的约束,从而对于给定的pr和ac电动机速度组合,当满足逆变器切换极限时,电动机速度的进一步降低可能受钳位(clamped)切换频率和基本不受约束的pr 的影响。在一个实施例中,pr或切换频率可被线性地控制在该电动机速度以下。在另一个实施例中,如本文所讨论的,可以通过在两个或更多个离散的切换频率分布之间进行切换来适应较低的切换频率。
47.在另一个实施例中,主导切换阶次的尖锐特性可以被软化。由逆变器113 的高频切换控制产生的主导切换阶次表现出相对较窄或较紧的带宽和尖锐的截止频率。这被车辆乘客感知为相对尖锐的音调噪声,并且不自然,具有不同的音调,因为该阶不携带实质的谐波内容。切换频率分布的频率抖动可以由控制器119实现。这里使用的术语频率抖动表示切换频率在切换频率分布的预定对称频带限制内(例如3%( /-1.5%)的随机化。
48.在另一个实施例中,在逆变器113的高频切换控制中可以采用两个或更多个离散的切换频率分布或pr。这种控制在本文中可以称为多pr控制。在这方面,多pr控制将在两个或更多个离散切换频率分布之间快速切换,以合成与由两个或更多个离散切换频率分布的连续切换控制独立产生的主导切换阶次不同的感知主导切换阶次。在这方面,快速切换可能意味着在两个或更多个离散的切换频率分布之间切换得足够快,以至于车辆乘员无法辨别出不同的音调特性。这转化为以至少约10hz的频率进行切换。如本文所提到的,也可以利用该技术来扩展较低的切换频率极限。尽管频率抖动利用了窄带内的连续频率,但是在两个或更多个离散切换频率分布之间进行快速切换可能会使用相差约10%或更大的pr及其对应的切换频率。
49.在另一个实施例中,在逆变器113的高频切换控制中,可以同时采用频率抖动和多pr控制。
50.在应用中,可以通过静态车辆校准来采用本文公开的各种高频切换控制。可替代
地,可以根据最终用户期望的车辆音调特性来选择性地采用本文公开的各种高频切换控制。例如,一个车辆操作者可能更喜欢相邻主导切换阶次之间的不连续过渡的听觉体验,因为她喜欢重复频率斜坡和下降效果,模仿了配备有多速比变速器的车辆常见的多速比切换。其他车辆操作者可能更喜欢在交流电动机103的更宽的rpm范围内平稳且连续地听到较低切换阶次的声音。可以通过选择性来适应个人喜好,例如基于即席或者与诸如经济或运动驾驶的操作模式结合或关联。附加地或替代地,可以响应于节气门致动或车辆制动或所请求的扭矩或车辆加速的其他指示来实现本文公开的各种高频切换控制。
51.尽管已经公开了阐述pr和ac电动机113rpm之间的控制对应关系的各种实施例,但是本领域的技术人员将认识到,这样的公开仅是示例性的,而不是限制性的。例如,包括轮速在内的各种传动系统部件转速中的任何一个之间的已知关系都可以适当地替代交流电动机的速度。在更复杂的传动系中具有不止一个交流电动机的车辆,例如具有前后驱动单元的车辆,可以受益于本文公开的高频切换控制的独立实施方式,以实现车辆的更复杂的声音特征。
52.除非明确地描述为“直接的”,否则在以上公开中描述了第一元件和第二元件之间的关系时,该关系可以是其中第一元件和第二元件之间不存在其他中间元件的直接关系,但是也可以是在第一和第二元件之间存在(在空间上或功能上)一个或多个中间元件的间接关系。
53.应该理解,在不改变本公开的原理的情况下,可以以不同的顺序(或同时)执行方法内的一个或多个步骤。此外,尽管以上将实施例中的每一个描述为具有某些特征,但是相对于本公开的任何实施例描述的那些特征中的任何一个或多个特征可以在任何其他实施例的特征中实现和/或与其他实施例的特征组合,即使该组合没有明确描述。换句话说,所描述的实施例不是互相排斥的,并且一个或多个实施例彼此的置换仍在本公开的范围内。
54.尽管已经参考示例性实施例描述了以上公开,但是本领域技术人员将理解,在不脱离本发明的范围的情况下,可以进行各种改变并且可以用等同物代替其要素。另外,在不脱离本公开的实质范围的情况下,可以做出许多修改以使特定情况或材料适应本公开的教导。因此,意图是本公开不限于所公开的特定实施例,而是将包括落入其范围内的所有实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
