1.本实用新型涉及监控技术领域,具体为一种可以自动调节的人工智能监控装置。
背景技术:
2.监控是指通过在指定区域的高度安装视频监控器,可在监控室内或移动设备上观看该指定区域的实时动态画面,而且可保存一个时间段内的视频,可对该区域发生的恶性事件进行有力的证明,监控已经在生活中广泛的使用,目前的监控装置不方便自行调节拍摄角度,导致拍摄区域较小,所以我们提出一种可以自动调节的人工智能监控装置。
3.现有专利(公告号:cn212672735u),一种可以自动调节的人工智能监控装置,包括安装座,所述安装座的上表面两侧均设有滑动架,所述滑动架均滑动连接有滑动杆,所述安装座上设有第一电机,所述第一电机的输出端贯穿所述第一壳体,所述第一电机的输出端连接有半齿轮,所述第一壳体的内部前后侧壁均设有第一齿条,所述第一齿条与所述半齿轮相啮合,所述第一壳体的上表面设有第二壳体。
4.在实现本实用新型过程中,发明人发现现有技术中至少存在如下问题没有得到解决;上述装置通过半齿轮与完整齿轮啮合实现视频探头的反复移动,由于速度过快,会导致拍摄的视频画面不够清晰,并且齿轮的材质较硬,半齿轮与完整齿轮重新啮合时会出现错齿啮合,产生较大的碰撞,容易发生损伤。
技术实现要素:
5.本实用新型的目的在于提供一种可以自动调节的人工智能监控装置,解决了背景技术中所提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种可以自动调节的人工智能监控装置,包括安装壳体,安装壳体顶部镶嵌安装有轴体,轴体顶部固定安装有安装座,安装座顶部铰接安装有监控设备,轴体中部外壁固定安装有第一塑质齿套体,轴体底部固定安装有连接杆,安装壳体内壁左侧固定安装有安装杆,安装杆外部固定安装有弹性绳,安装壳体内壁底部固定安装有轴承座和马达电机,马达电机外部电性安装有时间继电器,安装壳体内壁右侧固定安装有减速器,减速器的输出端固定安装有轴杆,轴杆顶部固定安装有安装盘,安装盘外壁固定安装有第二塑质齿套体。
7.作为本实用新型的一种优选实施方式,第二塑质齿套体与第一塑质齿套体相啮合,第二塑质齿套体的齿数为第一塑质齿套体齿数的三分之一。
8.作为本实用新型的一种优选实施方式,马达电机的电机轴与减速器的外部相连接。
9.作为本实用新型的一种优选实施方式,弹性绳与轴体的外壁相连接。
10.作为本实用新型的一种优选实施方式,轴承座内部镶嵌安装有阻尼轴承,连接杆与阻尼轴承的内圈镶嵌连接。
11.与现有技术相比,本实用新型的有益效果如下:
12.1.本实用新型通过马达电机经过减速器的减速带动安装盘的旋动,由于第二塑质齿套体与第一塑质齿套体啮合,可带动轴体转动120
°
,随后弹性绳拉动轴体复位,可实现监控设备监控范围的自动调节,增加监控设备的监控范围,并且由于设置有减速器可保证安装盘平稳的带动轴体旋动,而且当弹性绳带动轴体复位时,通过阻尼轴承进行减速,从而保证监控设备摆动角度时的稳定性,提升监控视频画面的平稳性。
13.2.本实用新型通过时间继电器可根据弹性绳恢复轴体位置的时间来对马达电机进行间歇开启控制,保证监控设备连续的进行角度摆动,由于第二塑质齿套体与第一塑质齿套体材质均为塑料,可减少因为齿轮错位啮合而产生碰撞力,避免传动结构发生损坏。
附图说明
14.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
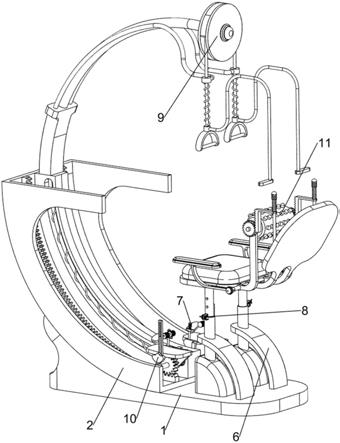
15.图1为本实用新型一种可以自动调节的人工智能监控装置的主视图;
16.图2为本实用新型一种可以自动调节的人工智能监控装置的第一塑质齿套体的俯视图。
17.图中:1、监控设备;2、安装座;3、安装壳体;4、第一塑质齿套体;5、轴体;6、安装杆;7、弹性绳;8、轴承座;9、阻尼轴承;10、连接杆;11、轴杆;12、时间继电器;13、马达电机;14、减速器;15、安装盘;16、第二塑质齿套体。
具体实施方式
18.如图1-2所示,本实用新型提供一种技术方案:一种可以自动调节的人工智能监控装置,包括安装壳体3,安装壳体3顶部镶嵌安装有轴体5,轴体5顶部固定安装有安装座2,安装座2顶部铰接安装有监控设备1,轴体5中部外壁固定安装有第一塑质齿套体4,轴体5底部固定安装有连接杆10,安装壳体3内壁左侧固定安装有安装杆6,安装杆6外部固定安装有弹性绳7,安装壳体3内壁底部固定安装有轴承座8和马达电机13,马达电机13外部电性安装有时间继电器12,安装壳体3内壁右侧固定安装有减速器14,减速器14的输出端固定安装有轴杆11,轴杆11顶部固定安装有安装盘15,安装盘15外壁固定安装有第二塑质齿套体16。
19.本实施例中如图1和图2所示,通过马达电机13的电机轴经过减速器14的减速,可缓慢的带动轴杆11旋动,由于由于第二塑质齿套体16与第一塑质齿套体4的齿数比为1:3,轴杆11可带动轴体5转动120
°
,随后马达电机13停止,弹性绳7因弹性复位可拉动轴体5复位,轴体5在复位过程中,连接杆10始终与阻尼轴承9配合,可避免轴体5复位转动速度过快,从而保证监控设备1摆动角度时的稳定性,提升监控视频画面的平稳性,时间继电器12可根据弹性绳7恢复轴体5位置的时间来对马达电机13进行间歇开启控制,保证监控设备1连续的进行角度摆动,由于第二塑质齿套体16与第一塑质齿套体4材质均为塑料,可减少因为齿轮错位啮合而产生碰撞力,避免传动结构发生损坏。
20.本实施例中,二塑质齿套体16与第一塑质齿套体4相啮合,第二塑质齿套体16的齿数为第一塑质齿套体4齿数的三分之一,轴杆11可带动轴体5转动120
°
。
21.本实施例中,马达电机13的电机轴与减速器14的外部相连接,马达电机13的电机轴经过减速器14的减速,可缓慢的带动轴杆11旋动。
22.本实施例中,弹性绳7与轴体5的外壁相连接,弹性绳7因弹性复位可拉动轴体5复位。
23.本实施例中,轴承座8内部镶嵌安装有阻尼轴承9,连接杆10与阻尼轴承9的内圈镶嵌连接,轴体5在复位过程中,连接杆10始终与阻尼轴承9配合,可避免轴体5复位转动速度过快。
24.工作原理:在一种可以自动调节的人工智能监控装置使用的时候,通过马达电机13的电机轴经过减速器14的减速,可缓慢的带动轴杆11旋动,由于由于第二塑质齿套体16与第一塑质齿套体4的齿数比为1:3,轴杆11可带动轴体5转动120
°
,随后马达电机13停止,弹性绳7因弹性复位可拉动轴体5复位,轴体5在复位过程中,连接杆10始终与阻尼轴承9配合,可避免轴体5复位转动速度过快,时间继电器12可根据弹性绳7恢复轴体5位置的时间来对马达电机13进行间歇开启控制,保证监控设备1连续的进行角度摆动。
技术特征:
1.一种可以自动调节的人工智能监控装置,包括安装壳体(3),其特征在于:所述安装壳体(3)顶部镶嵌安装有轴体(5),所述轴体(5)顶部固定安装有安装座(2),所述安装座(2)顶部铰接安装有监控设备(1),所述轴体(5)中部外壁固定安装有第一塑质齿套体(4),所述轴体(5)底部固定安装有连接杆(10),所述安装壳体(3)内壁左侧固定安装有安装杆(6),所述安装杆(6)外部固定安装有弹性绳(7),所述安装壳体(3)内壁底部固定安装有轴承座(8)和马达电机(13),所述马达电机(13)外部电性安装有时间继电器(12),所述安装壳体(3)内壁右侧固定安装有减速器(14),所述减速器(14)的输出端固定安装有轴杆(11),所述轴杆(11)顶部固定安装有安装盘(15),所述安装盘(15)外壁固定安装有第二塑质齿套体(16)。2.根据权利要求1所述的一种可以自动调节的人工智能监控装置,其特征在于:所述第二塑质齿套体(16)与第一塑质齿套体(4)相啮合,第二塑质齿套体(16)的齿数为第一塑质齿套体(4)齿数的三分之一。3.根据权利要求1所述的一种可以自动调节的人工智能监控装置,其特征在于:所述马达电机(13)的电机轴与减速器(14)的外部相连接。4.根据权利要求1所述的一种可以自动调节的人工智能监控装置,其特征在于:所述弹性绳(7)与轴体(5)的外壁相连接。5.根据权利要求1所述的一种可以自动调节的人工智能监控装置,其特征在于:所述轴承座(8)内部镶嵌安装有阻尼轴承(9),连接杆(10)与阻尼轴承(9)的内圈镶嵌连接。
技术总结
本实用新型涉及监控技术领域,具体公开了一种可以自动调节的人工智能监控装置,包括安装壳体,安装壳体顶部镶嵌安装有轴体,轴体顶部固定安装有安装座,安装座顶部铰接安装有监控设备,轴体中部外壁固定安装有第一塑质齿套体,轴体底部固定安装有连接杆。本实用新型通过马达电机经过减速器的减速带动安装盘的旋动,随后可带动轴体转动,随后弹性绳拉动轴体复位,可实现监控设备监控范围的自动调节,增加监控设备的监控范围,并且由于设置有减速器可保证安装盘平稳的带动轴体旋动,而且当弹性绳带动轴体复位时,通过阻尼轴承进行减速,从而保证监控设备摆动角度时的稳定性,提升监控视频画面的平稳性。视频画面的平稳性。视频画面的平稳性。
技术研发人员:宋英俊 李安杰
受保护的技术使用者:宋英俊
技术研发日:2021.10.29
技术公布日:2022/4/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。