1.本发明涉及一种用于确定钟表显示器(即显示装置或部件)的位置的设备,用于确定钟表的至少一个显示器的瞬时位置,该设备包括协调该设备所包含的时基和形状识别装置以及光学采集装置的控制装置,所述控制装置设置成识别所述至少一个显示器并监控其行程,以便对所述至少一个显示器相对于固定引导标记件(fixed guide-mark)的瞬时位置进行编码,并控制所述至少一个显示器在不同时刻的进入位置,以便确定所述至少一个显示器相对于所述固定引导标记件的移动性。
2.本发明还涉及一种用于手表的自动上弦机构,其包括至少一个用于确定这种钟表显示器的位置的所述设备。
3.本发明还涉及一种用于调节手表的走时差和/或状态的仪器,其包括这种自动上弦机构,和/或至少一个用于确定钟表显示器位置的所述设备。
4.本发明涉及钟表尤其是手表的维护设备领域,尤其是自动上弦机构领域。
背景技术:
5.斯沃琪集团研发有限公司名下的文献ep3572887描述了一种智能上弦机构,该机构使用诸如相机之类的观察系统,以用于在上弦期间观察至少一块手表。这种方案使得通过识别指针来实施用于读取时间的算法成为可能,这是功能性的,但是需要针对显示器(特别是指针和表盘)的每种配置进行编程。对拍摄参数的敏感度相对较高,并且对于以下手表难以保证读取的可靠性:所述手表的至少一个表盘被高度装饰,和/或所述手表的显示器(尤其是指针)可能融入这种表盘的装饰中。例如,带有条纹图案的表盘会出现阅读困难,其中某些条纹可能非常像秒针。
6.所使用的算法还基于指针的运动,以便将它们与表盘区分开来。这种方法对于秒针和分针相对有效,但是时针移动太慢,需要等待很长时间才能获得有用的信息。因此,尽管是可能的,但是时针的识别目前还没有采用。
7.通用识别算法可以构成一种方案,然而,它的开发需要考虑各种各样的显示器配置。
技术实现要素:
8.本发明提出改善手表指针相对于表盘的视觉区别。特别地,本发明通过立体视觉(stereoscopy)实现了指针的检测。
9.为此,本发明涉及根据权利要求1所述的用于确定钟表显示器位置的设备。
10.本发明还涉及一种用于手表的自动上弦机构,其包括至少一个用于确定这种钟表显示器位置的所述设备。
11.本发明还涉及一种用于调节手表的走时差和/或状态的仪器,其包括这种自动上弦机构,和/或至少一个用于确定钟表显示器位置的所述设备。
附图说明
12.通过参考附图阅读以下详细描述,本发明的其他特征和优点将变得显而易见,其中:
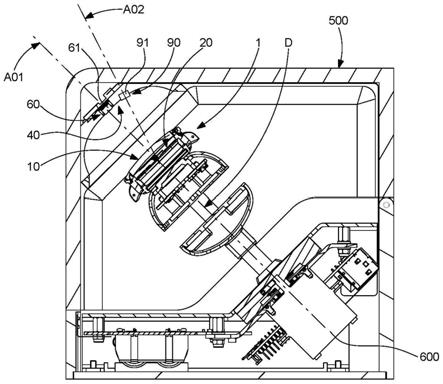
[0013]-图1示意性示出了用于手表的自动上弦机构的剖视图,该自动上弦机构包括根据本发明的用于确定显示器位置的设备;
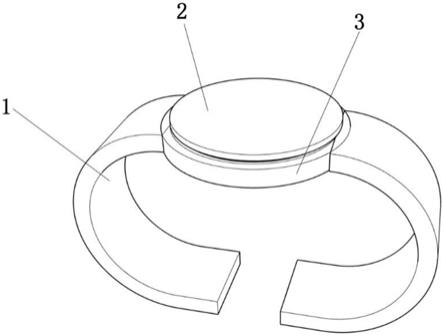
[0014]-图2示意性示出了手表的透视图,该手表的表盘构成了位于其顶部的由指针组成的显示器的固定引导标记件;
[0015]-图3的框图示出了用于调节手表的走时差和/或状态的设备,其包括根据图1的自动上弦机构,该自动上弦机构本身包括用于确定显示器位置的所述设备;
[0016]-图4是图1的一个细部的剖视图。
具体实施方式
[0017]
本发明提出改进手表的显示器特别是指针相对于一个表盘或多个表盘(如果手表包括多个表盘的话)的视觉区分。
[0018]
本说明书更具体地公开了其中这些显示器为指针的非限制性情况。
[0019]
本发明采用了用于增加可用信息的量的装置,特别是通过添加深度信息。事实上,几乎在所有情况下,指针都位于手表表盘的上方。
[0020]
这涉及将观察系统特别是相机或类似物的最靠近的元件与距其最远的那些元件,特别是一个或多个表盘,相区别。此信息被注入到算法中,因此使得能够非常显著地提高检测概率。
[0021]
存在许多不同的方法,其理论上使得能够获得深度信息,例如但不限于:
[0022]-使用多个摄影设备特别是多个相机来执行立体视觉拍摄;
[0023]-摄影设备特别是相机与手表之间距离的变化;
[0024]-摄影设备特别是相机的焦点的变化;
[0025]-照明装置的位置的变化,其使得能够移动指针在表盘上所透射的阴影。
[0026]
这些不同的方法甚至可以组合,然而代价是更大的处理复杂性。
[0027]
如同用于改变焦点的方法一样,用于改变距离的方法需要非常昂贵且笨重的光学器件,因为后者必须具有非常浅的景深,因此需要大光圈和长焦距。
[0028]
因此,由于必要设备的适度成本,优选实施例是通过在手表的轴线之外简单地增加第二摄影设备特别是相机来利用立体视觉;其中一个摄影设备特别是相机优选地保持在轴线上,以便在将指针从表盘区分出来时使视差效应最小化。
[0029]
一种变型包括使用照明装置,其启动或取向可以变化,使得能够移动指针投射在表盘上的阴影。这种变型使得仅具有一个单一的摄影设备同时保持相对简单成为可能。阴影的光学处理使得能够识别相关的显示器并确定其位置而没有模糊性。
[0030]
对时针的检测因此被大大简化,即使这个时针看起来是不动的。
[0031]
图1示出了上弦机构的剖视图,该上弦机构因此包括用于观察手表显示器的两个相机。
[0032]
更具体地,本发明因此涉及一种用于确定钟表显示器100的位置的设备,其用于确定至少一个所述显示器10的瞬时位置,所述显示器10特别是钟表的指针,尤其是手表1的指
针。
[0033]
该设备100包括控制装置80,该控制装置80被布置成协调该设备100所包括的基准时基50和形状识别装置70以及光学采集装置60,以便一方面通过将特定显示器10与钟表的其他显示器相区分来识别该特定显示器10,另一方面监控该特定显示器10的行程,以便对该特定显示器10相对于固定引导标记件20的瞬时位置进行编码,其中该显示器10可相对于该固定引导标记件20移动,更具体地但不限于,该显示器10可在该固定引导标记件20前面移动。
[0034]
这些控制装置80被设置成控制给定显示器10在不同时刻进入的位置,以便确定该给定显示器10相对于与该显示器相关联的固定引导标记件20的移动性。这使得能够识别与钟表的静态元件相关的慢显示器,例如时针、月历指示器、日历等,即使视觉对比使其难以用肉眼识别。
[0035]
根据本发明,这些控制装置80包括深度位置确定装置40,用于确定显示器10的平面pa相对于固定引导标记件20的平面pr的深度。
[0036]
根据可以组合的各种变型,这些深度位置确定装置40可以以各种方式布置。
[0037]
在一个测微变型中,这些深度位置确定装置40包括用于控制光学采集装置60相对于固定引导标记件20的位置的装置41。
[0038]
在一个焦点变型中,这些深度位置确定装置40包括用于控制光学采集装置60相对于显示器10的焦点的装置42。
[0039]
在一个立体视觉变型中,这些深度位置确定装置40包括至少一个附加光学采集装置90,其与光学采集装置60耦合,以便监控同一显示器10并通过干涉确定法(interferential determination)来定义其在空间中的位置。因此,通过干涉确定由附加光学采集装置90和光学采集装置60传输到控制装置80的信号,来确定显示器10在空间中的精确位置。
[0040]
在一个运动学变型中,这些深度位置确定装置40包括用于照亮至少一个显示器10的装置,该装置被布置成将至少一个显示器10的阴影投射在固定表面上,这些照明装置相对于该固定表面具有由控制装置80控制的可变入射角和/或可变位置,以便移动所投射的阴影,其由形状识别装置70识别,以用于确定所述显示器10及其运动。所述可变入射角可以由能够移动所投射的阴影的照明源的移动性来代替或补充,特别是平面或线性或圆形移动性。
[0041]
通常,该至少一个显示器10在其行程期间可在显示平面pa中相对于包括基准显示装置30的固定引导标记件20移动。这些基准显示装置30包括至少一个位置标示器和/或至少一个位置刻度。
[0042]
光学采集装置60因此与该基准时基50耦合,并且优选地能够在至少一个显示器10的整个行程中监控该至少一个显示器10,更具体地能够在同一钟表的每个显示器的整个行程中监控每个显示器。
[0043]
与每个光学采集装置60交互的形状识别装置70能够识别和区分每个显示器10的形状。
[0044]
因此,与时基50和每个光学采集装置60以及形状识别装置70交互的控制装置80被设置成:在关于时基50识别的时刻,确定每个显示器10相对于相关的固定引导标记件20的
相对位置。
[0045]
更具体地,每个光学采集装置60,特别包括但不限于第一相机61,被设置为执行相对于显示平面pa的基本正面的图像输入,所考虑的显示器10可在该显示平面pa中移动。
[0046]
应当理解,像相机这样的同一实质载体(same material support)可以包括形状识别装置70和光学采集装置60两者。
[0047]
深度位置确定装置40被布置成确定显示平面pa相对于固定引导标记件20的基准平面pr(显示平面pa与该基准平面pr平行)且垂直于该基准平面pr的深度位置,以便确保对特定显示器10的准确识别。
[0048]
更具体地,用于确定深度位置的装置40包括至少一个附加光学采集装置90,其与光学采集装置60耦合以用于监控同一显示器10,并且被设置为相对于该显示器10可在其中移动的显示平面pa执行倾斜或横向图像输入,以确定显示平面pa相对于固定引导标记件20的基准平面pr(显示平面pa与该基准平面pr平行)且垂直于该基准平面pr的深度位置,以确认对显示器10的正确识别,并改善显示器10的位置进入。这些附加光学采集装置90可以特别包括第二相机91,并且如果光学采集装置60也包括第一相机61,则这两个相机61和91的光轴oa1和oa2不重合,并且优选不平行。
[0049]
自然,附加光学采集装置90可以包括用于控制它们位置的装置92和/或用于控制它们焦点的装置93,就像光学采集装置60一样。
[0050]
更具体地,这些附加光学采集装置90以及它们所耦合以用于监控同一显示器10的光学采集装置60被布置成用于立体视觉拍摄。
[0051]
所述设备100特别设置成在同一时刻确定同一钟表特别是手表的每个显示器10的瞬时位置。
[0052]
更具体地,这些附加光学采集装置90和光学采集装置60在基准平面pr上的投影彼此隔开一定距离布置。
[0053]
更具体地,当显示器10是旋转显示器时,光学采集装置60包括以显示器10的旋转轴线d为中心的光轴oa1。
[0054]
更具体地,当显示器10是以周期性跳变方式移动的显示器时,控制装置80被布置成在分隔期间大于跳变周期的时刻控制显示器10的位置进入。
[0055]
更具体地,光学采集装置60至少在距离上相对于固定引导标记件20是可移动的。
[0056]
更具体地,光学采集装置60包括至少一个具有自动聚焦装置以用于其自动聚焦的相机。
[0057]
本发明还涉及一种用于手表500的自动上弦机构,其包括至少一个用于确定钟表显示器100的位置的所述设备。该上弦机构500常规地包括机动化装置600,其被布置成移动手表1,例如但不限于围绕轴线d,轴线d是显示器的轴线,也是自动装置的轴线。
[0058]
本发明还涉及一种用于调节手表1000的走时差和/或状态的仪器,其包括这种自动上弦机构500,和/或至少一个用于确定钟表显示器100的位置的所述设备。特别地,根据从斯沃琪集团研发有限公司名下的文献ep3401235(走时差调整)和ep3410236(状态校正)获得的信息,这种用于调整手表1000的走时差和/或状态的仪器是可以实现的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。