技术特征:
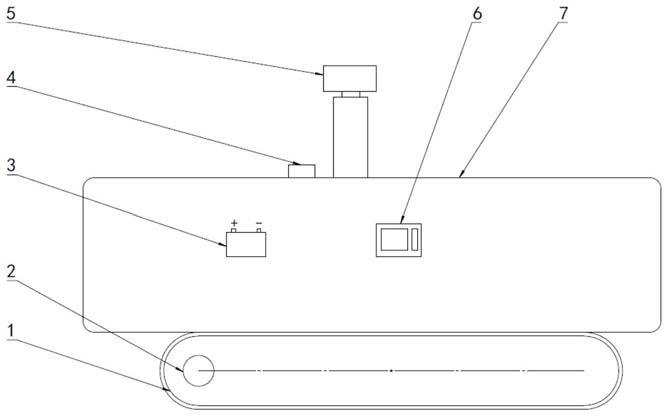
1.一种基于旋转雷达和imu的巷道三维重建系统,其特征在于,系统包括移动载体机器(7)、履带轮(1)、轮速计(2)、惯性测量系统imu(4)、旋转雷达(5)、工控机(6)和电源(3);所述轮速计(2)安装于履带轮(1)上,所述惯性测量系统imu(4)、旋转雷达(5)和工控机(6)安装于移动载体机器(7)上;所述轮速计(2)、惯性测量系统imu(4)、旋转雷达(5)分别与工控机(6)电连接;所述电源为轮速计(2)、惯性测量系统imu(4)、旋转雷达(5)以及工控机(6)供电。2.根据权利要求1所述的基于旋转雷达和imu的巷道三维重建系统,其特征在于,所述工控机(6)包括处理器和存储器;所述存储器上存储有计算机程序,所述计算机程序被所述处理器执行时,实现巷道的三维重建。3.根据权利要求1所述的基于旋转雷达和imu的巷道三维重建系统,其特征在于,所述旋转雷达(5)包括激光雷达、旋转云台和旋转轴;所述旋转轴垂直于地面,并以恒定的速度旋转;所述激光雷达与旋转轴固定连接,并使激光雷达的扫描平面垂直于地面;固定连接的激光雷达与旋转轴随着旋转云台一起旋转。4.采用权利要求1至3所述的基于旋转雷达和imu的巷道三维重建系统进行巷道三维重建的方法,其特征在于,包括如下步骤:步骤1:基于旋转雷达和imu的巷道三维重建系统建立坐标系,并对旋转雷达进行标定;步骤2:静态的获取旋转雷达采集的三维点云数据,赋予点云中每一个点一个置信度,并去除置信度为零的点;步骤3:通过滤波处理,对三维点云数据进行去除离群点、去除移动载体机器机身点云和体素化操作;步骤4:获取imu的惯性数据、轮速计的速度数据,通过卡尔曼算法融合获取移动载体机器位移数据;步骤5:对前后两帧点云数据进行配准,获取高精度点云位姿;步骤6:去除历史帧的点云数据中的工作面;步骤7:基于置信度进行点云融合,获得三维巷道模型。5.根据权利要求4所述的采用基于旋转雷达和imu的巷道三维重建系统进行巷道三维重建的方法,其特征在于,所述步骤1的过程如下:步骤1.1:根据移动载体机器建立移动载体坐标系t
e
;步骤1.2:根据惯性测量系统imu建立imu坐标系t
i
;步骤1.3:根据旋转雷达建立旋转雷达坐标系t
l
;步骤1.4:建立世界坐标系t
w
,并初始化与移动载体坐标系t
e
重合;步骤1.5:建立世界坐标系2t
w2
,并初始化与imu坐标系t
i
重合;步骤1.6:激光雷达采集连续两帧点云,使用calidar calibration方法,获得激光雷达坐标系到云台坐标系的标定矩阵。6.根据权利要求5所述的采用基于旋转雷达和imu的巷道三维重建系统进行巷道三维重建的方法,其特征在于,所述步骤2的过程如下:步骤2.1:在移动载体机器静止时,静态的采用激光雷达获取巷道静态的二维点云数据和旋转云台的转角;步骤2.2:根据静态的二维点云数据、旋转云台的转角以及步骤1.6得到的标定矩阵,获
得旋转雷达坐标系下的三维点云数据;步骤2.3:根据旋转雷达坐标系下的三维点云数据以及旋转雷达坐标系与移动载体坐标系的坐标变换矩阵,获得移动载体坐标系下的三维点云数据;步骤2.4:测试不同距离下雷达精度,获得不同距离下雷达的精度变化情况,为点云中每一个点设置置信度,过程如下:步骤2.4.1:获取激光雷达点云数据中每个测距点到雷达的距离;步骤2.4.2:测试不同距离下雷达精度,并获得不同距离下雷达的精度变化情况;步骤2.4.3:根据精度测试结果,为点云中每一个点设置一个0~1范围内的置信度,数值越大,点云置信度越高;步骤2.5:判断点云中点的置信度是否为零,若为零,则剔除该点。7.根据权利要求6所述的采用基于旋转雷达和imu的巷道三维重建系统进行巷道三维重建的方法,其特征在于,所述步骤3的过程如下:步骤3.1:利用统计滤波器对三维点云数据进行去除离群点操作,得到去除离群点后的点云数据,过程如下:步骤3.1.1:遍历点云,计算每个点与其最近的k个邻居点之间的平均距离;步骤3.1.2:计算所有平均距离的均值μ与标准差σ,则距离阈值d
max
表示为d
max
=μ a
×
σ,其中a为比例系数;步骤3.1.3:再次遍历点云,剔除与k个邻居点的平均距离大于d
max
的点;步骤3.2:利用条件滤波器对所述三维点云数据进行条件滤波,得到去除移动载体机器机身的点云数据,过程如下:步骤3.2.1:根据移动载体机器大小与移动载体机器在移动载体坐标系下的位置,设置条件滤波参数;步骤3.2.2:根据条件滤波参数将移动载体机器所在长方体内的全部点云去除,获得移动载体坐标系下去除移动载体机器机身点云后的三维点云数据;步骤3.3:利用体素网格滤波器对点云数据进行滤波降采样,得到体素化后的三维点云数据,过程如下:步骤3.3.1:设置网格大小,并将三维点云数据划分为多个网格,计算每一网格的重心;步骤3.3.2:以重心数据代替相应网格中所有的点,获得移动载体坐标系下体素化后的三维点云数据。8.根据权利要求4所述的采用基于旋转雷达和imu的巷道三维重建系统进行巷道三维重建的方法,其特征在于,所述步骤4的过程如下:步骤4.1:获取惯性测量系统imu的惯性数据,包括imu坐标系下惯性测量系统imu的三轴加速度数据世界坐标系2下imu旋转角的四元数数据步骤4.2:根据世界坐标系2下imu旋转角的四元数数据,获得对应的旋转矩阵r
i,w2
;步骤4.3:根据imu坐标系下imu的三轴加速度数据,获得世界坐标系2下imu的加速度:步骤4.4:获取两个轮速计的速度数据,通过运动学分析,获得移动载体坐标系下移动载体机器的速度数据
其中,为x轴速度,为y轴速度,为绕z轴角速度;步骤4.5:应用刚体平面运动的运动学原理,使用基点法由移动载体机器的速度数据求得移动载体坐标系下imu的速度数据其中,z方向速度为零;步骤4.6:根据移动载体坐标系下imu的速度数据获得世界坐标系2下imu的速度:其中,r
i,e
为移动载体坐标系到imu坐标系的旋转矩阵;步骤4.7:将世界坐标系2下imu的速度和imu测得的imu加速度作为卡尔曼滤波的观测值,对系统状态进行最优估计,估计世界坐标系2下imu的位移、速度、加速度;步骤4.8:根据世界坐标系2下imu的加速度和旋转角的四元数数据,获得世界坐标系2下imu的位姿矩阵,再进行坐标转换得到世界坐标系下移动载体机器的位姿矩阵。9.根据权利要求4所述的采用基于旋转雷达和imu的巷道三维重建系统进行巷道三维重建的方法,其特征在于,所述步骤5的过程如下:步骤5.1:当旋转雷达开始获取点云时,同时储存世界坐标系移动载体机器位姿矩阵;步骤5.2:获取当前帧与上一帧点云对应的移动载体机器位姿矩阵,同时获取当前帧与上一帧点云对应的移动载体机器位姿变换矩阵;步骤5.3:将移动载体机器位姿变换矩阵作为初值,对当前帧与上一帧点云进行icp配准,获得精度更高的移动载体机器位姿变化矩阵;步骤5.4:使用移动载体机器位姿变换矩阵修正所述当前帧移动载体机器位姿矩阵,获得更高精度的移动载体机器位姿矩阵;步骤5.5:,根据步骤5.4得到的移动载体机器位姿矩阵将当前帧三维点云数据由移动载体坐标系转换到世界坐标系下,最终获得世界坐标系下的单帧三维点云数据。10.根据权利要求4所述的采用基于旋转雷达和imu的巷道三维重建系统进行巷道三维重建的方法,其特征在于,所述步骤7的过程如下:步骤7.1:根据世界坐标系下三维点云数据中每一个点所在体素计算点云中每个点的索引;步骤7.2:将第一帧点云的所有点的索引放入索引容器中;步骤7.3:当新的点云输入时,依次判断此点云中每个点的索引是否在索引容器中已经存在;若不存在,将此点的索引放入索引容器中,此点保留到整体点云中,然后继续判断下一个点;若存在,保留两个点中置信度较大的点,舍弃置信度较小的点,置信度相同则保留两个点的中点,然后继续判断下一个点;步骤7.4:直至点云中所有点判断完毕,继续等待下一帧点云输入,实现索引容器中对索引的动态去除,只保留可能会被影响体素的索引;步骤7.5:将整体点云进行表面重建,在线的获得巷道的三维重建模型。
技术总结
本发明公开一种基于旋转雷达和IMU的巷道三维重建系统及方法,系统包括移动载体机器、履带轮、轮速计、惯性测量系统IMU、旋转雷达、工控机和电源。其中轮速计安装于履带轮上,惯性测量系统IMU、旋转雷达和工控机安装于移动载体机器上,轮速计、惯性测量系统IMU、旋转雷达分别与工控机电连接。基于上述系统的巷道三维重建方法给点云置信度赋值以及基于置信度的点云融合,获得了更为精准的巷道场景点云。对巷道点云进行了表面重建,使得地面监控人员更直观的观测到巷道环境。直观的观测到巷道环境。直观的观测到巷道环境。
技术研发人员:程红太 郭小林 席会东
受保护的技术使用者:东北大学
技术研发日:2022.01.11
技术公布日:2022/4/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。