1.本发明涉及巷道施工技术领域,尤其涉及一种基于三维点云的巷道超欠挖检测方法及系统。
背景技术:
2.在巷道施工过程中,掘进时难以避免遇到断面超欠挖的情况,为有效控制超挖欠挖,保证施工进度,控制施工成本,巷道断面超欠挖检测是施工过程中不可或缺的关键环节。巷道超挖欠挖是以设计的巷道开挖轮廓线为基准线,实际开挖获得的断面在基准线以外的部分为超挖,在基准线以内的部分则称为欠挖。超挖带来的后果是回采巷道会造成后期回采的过程中超前支护浪费材料,同时支护效果不好,存在安全隐患。欠挖后果是可能在后期工作中在运输、行人还有支护上造成更大的麻烦,甚至有时候需要再次爆破进行修正,同样的浪费材料和人力。
3.中国专利“cn109598714a”提出了一种基于图像三维重建及网格曲面的隧道超欠挖检测方法,通过照片三维重建得到隧道真实开挖轮廓曲面,并通过与网格化的隧道设计开挖轮廓曲面进行对比,得到隧道超欠挖检测情况。但在巷道环境中,光照情况较差,这会严重影响采集数据这一环节,进而影响重建以及评估精度。
4.中国专利“cn109470206a”提出了应用于隧道测量的三维激光扫描系统,通过三维激光扫描仪、棱镜、全站仪等数据处理系统采集数据,所述数据预处理系统用于将采集的数据导入到软件中,可寻找球棱镜位置,后视定向完成点云定位定向,对数据预处理完成后,进行隧道测量评估。该方法依赖于全站仪的使用,无法在线实时的对巷道超欠挖情况进行评估。
5.在测量巷道的超欠挖方面,中国矿业大学邹宝平等基于隧道数据采集模块、隧道数据前处理模块和隧道三维可视化模型构建模块等提出了隧道爆破质量三维可视化数字模型构建的方法,通过隧道数据采集模块采集了雷达数据,通过geomagic studio对点云进行了处理,建立了隧道爆破质量三维可视化数字模型,并对隧道开采做出评价。该种方法在开采完成时并没有对其进行质量的自动评估,带来一定操作上的复杂化,不利于施工人员的操作。
6.通过对以上目前现有的巷道超挖欠挖评估方法进行分析,可以得知这些方法具有一定的不准确性及危险性,并且在巷道掘进完成时并没有对其进行质量的自动评估,带来一定操作上的复杂化,不利于施工人员的操作。
技术实现要素:
7.针对上述现有技术的不足,本发明提供一种基于三维点云的巷道超欠挖检测方法及系统。
8.为解决上述技术问题,本发明所采取的技术方案是:一种基于三维点云的巷道超欠挖检测方法,包括如下步骤:
9.步骤1:采用巷道三维重建方法得到三维重建后的巷道点云数据,并同时获得巷道设计要求的模型点云数据;
10.步骤2:将三维重建后的巷道点云数据与巷道设计要求的模型点云数据进行配准对齐;
11.进一步的,所述将三维重建后的巷道点云数据与巷道设计要求的模型点云数据进行配准对齐时,以巷道设计要求的模型点云数据中的地面和巷道的中心线为配准基准。
12.进一步的,所述将三维重建后的巷道点云数据与巷道设计要求的模型点云数据进行配准对齐采用基于地面与墙面为特征的最近点迭代配准算法icp进行配准。
13.进一步的,所述采用基于地面与墙面为特征的最近点迭代配准算法icp进行配准的过程如下:
14.s1:设定一个墙面高度值作为提取阈值;
15.s2:根据提取的阈值,对三维重建后的巷道点云数据与巷道设计要求的模型点云数据中的地面和部分墙体采用直通滤波算法进行分割;
16.s3:将分割后的巷道设计要求的点云数据与实际三维重建后的巷道点云数据采用最近点迭代配准算法icp进行配准,得到两片姿态一致的点云。
17.步骤3:将两个巷道点云数据从直角坐标系转换成柱坐标系;
18.步骤4:根据坐标转换后设定的点云的z轴坐标数值与极角数值给点云划分栅格,储存每个点云数据相应坐标的极径数值并作差,得到超欠挖点坐标,具体过程如下:
19.步骤4.1:设定纵向分割值,沿柱坐标系的z轴对配准后的两点云数据进行纵向分割;
20.步骤4.2:设定横向分割值,以极点为基准根据极角度数对配准后的两点云数据进行横向分割;
21.步骤4.3:以z轴坐标与极角为唯一坐标存储栅格中点云数据对应坐标的极径,即每个点云数据由三个数据组成:极径ρ、极角θ以及z轴长度;
22.步骤4.4:将同一栅格之中的巷道设计要求模型点云数据与三维重建后的巷道点云数据的极径作差,即计算ρ
极径差值
=ρ
巷道设计要求模型点云-ρ
三维重建后的巷道点云
,其中ρ
巷道设计要求模型点云
是巷道设计要求模型点云数据栅格中储存的极径数值,其中ρ
三维重建后的巷道点云
是三维重建后的巷道点云数据栅格中储存的极径数值,ρ
极径差值
是二者的极径差值;
23.步骤4.5:当ρ
极径差值
的绝对值在范围[0,a]中,判断为标准状态;当ρ
极径差值
的值为正且大于a,则判断该巷道处为欠挖状态,将欠挖点的坐标保存到欠挖点云文件之中;当ρ
极径差值
的值为负且小于-a,则判断该巷道处为超挖状态,将超挖点的坐标保存到超挖点云文件之中。
[0024]
进一步的,为更直观的查看巷道超欠挖情况,根据所述步骤4得到的超欠挖点坐标,分别对三维重建后的巷道点云数据中欠挖点和超挖点的rgb数值进行改变,实现对三维重建后的巷道点云数据中欠挖点和超挖点的渲染,并用显示器显示。
[0025]
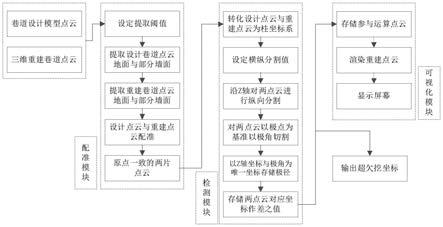
另一方面,本发明还针对上述基于三维点云的巷道超欠挖检测方法设计了巷道超欠挖检测系统,系统包括:输入模块、配准模块、检测模块和可视化模块;
[0026]
所述输入模块同时输入三维重建方法得到三维重建后的巷道点云数据和巷道设计要求的模型点云数据;
[0027]
所述配准模块以巷道设计要求的模型点云数据中的地面和巷道的中心线为配准
基准,将三维重建后的巷道点云数据与巷道设计要求的模型点云数据进行配准对齐,使两点云拥有较为一致的姿态;
[0028]
所述检测模块将两个巷道点云数据从直角坐标系转换成柱坐标系;并根据坐标转换后设定的点云的z轴坐标数值与极角数值给点云划分栅格,储存相应坐标的极径数值并作差,得到超欠挖点坐标;
[0029]
所述可视化模块在栅格中提取参与比较的两点云,分别对三维重建后的巷道点云数据中欠挖点和超挖点的rgb数值进行改变,实现对三维重建后的巷道点云数据中欠挖点和超挖点的渲染,并用显示器显示。
[0030]
采用上述技术方案所产生的有益效果在于:本发明提供的方法与系统相较于传统的全站仪等巷道超欠挖检测方法,该检测方法易于实施,效率高,极大的提升了巷道超欠挖检测的实时性,并且有直观的可视化模块,便于施工人员实时检测巷道超欠挖情况。
附图说明
[0031]
图1为本发明实施例中基于三维点云的巷道超欠挖检测方法的流程图;
[0032]
图2为本发明实施例中点云数据划分栅格的示意图;
[0033]
图3为本发明实施例中巷道超欠挖检测系统的结构示意图;
具体实施方式
[0034]
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
[0035]
如图1所示,本实施例中基于三维点云的巷道超欠挖检测方法如下所述。
[0036]
步骤1:采用巷道三维重建方法得到三维重建后的巷道点云数据,并同时获得巷道设计要求的模型点云数据;
[0037]
步骤2:将三维重建后的巷道点云数据与巷道设计要求的模型点云数据进行配准对齐;
[0038]
进一步的,所述将三维重建后的巷道点云数据与巷道设计要求的模型点云数据进行配准对齐时,以巷道设计要求的模型点云数据中的地面和巷道的中心线为配准基准。
[0039]
进一步的,所述将三维重建后的巷道点云数据与巷道设计要求的模型点云数据进行配准对齐采用基于地面与墙面为特征的最近点迭代配准算法icp进行配准。
[0040]
进一步的,所述采用基于地面与墙面为特征的最近点迭代配准算法icp进行配准的过程如下:
[0041]
s1:设定一个墙面高度值作为提取阈值;
[0042]
本实施例中,如果将分割墙面的高度设定过高,在配准时地面多占的比例就会降低,进而地面就会出现地面不能重合的状况,这不符合所期待的结果。如果配准时墙面所占比例较低,配准时可能会发生期望点云模型与实际点云模型配反的情况,这也不符合所期待的结果,所以有必要设定一个合理的墙面高度值进行分割。经过多次实验,发现墙面高度值设定在原墙高值的25%附近时实际配准效果最好。
[0043]
s2:根据提取的阈值,对三维重建后的巷道点云数据与巷道设计要求的模型点云数据中的地面和部分墙体采用直通滤波算法进行分割;
[0044]
s3:将分割后的巷道设计要求的点云数据与实际三维重建后的巷道点云数据采用最近点迭代配准算法icp进行配准,得到两片姿态一致的点云。
[0045]
步骤3:将两个巷道点云数据从直角坐标系转换成柱坐标系;
[0046]
本实施例中,直角坐标系转换成柱坐标系的方法如下所述:
[0047][0048][0049]
z=z.
[0050]
其中,等号右侧的x、y、z分别为直角坐标系中的坐标值;等号左侧的ρ为柱坐标系的极径值,θ为柱坐标系的极角,z为柱坐标系在z轴上的数值。
[0051]
步骤4:根据坐标转换后设定的点云的z轴坐标数值与极角数值给点云划分栅格,栅格的划分情况如图2所示,储存每个点云数据相应坐标的极径数值并作差,得到超欠挖点坐标,具体过程如下:
[0052]
步骤4.1:设定纵向分割值,沿柱坐标系的z轴对配准后的两点云数据进行纵向分割;
[0053]
步骤4.2:设定横向分割值,以极点为基准根据极角度数对配准后的两点云数据进行横向分割;
[0054]
步骤4.3:以z轴坐标与极角为唯一坐标存储栅格中点云数据对应坐标的极径,即每个点云数据由三个数据组成:极径ρ、极角θ以及z轴长度;
[0055]
步骤4.4:将同一栅格之中的巷道设计要求模型点云数据与三维重建后的巷道点云数据的极径作差,即计算ρ
极径差值
=ρ
巷道设计要求模型点云-ρ
三维重建后的巷道点云
,其中ρ
巷道设计要求模型点云
是巷道设计要求模型点云数据栅格中储存的极径数值,其中ρ
三维重建后的巷道点云
是三维重建后的巷道点云数据栅格中储存的极径数值,ρ
极径差值
是二者的极径差值;
[0056]
步骤4.5:当ρ
极径差值
的绝对值在范围[0,a]中,判断为标准状态;当ρ
极径差值
的值为正且大于a,则判断该巷道处为欠挖状态,将欠挖点的坐标保存到欠挖点云文件之中;当ρ
极径差值
的值为负且小于-a,则判断该巷道处为超挖状态,将超挖点的坐标保存到超挖点云文件之中。
[0057]
进一步的,为更直观的查看巷道超欠挖情况,根据所述步骤4得到的超欠挖点坐标,分别对三维重建后的巷道点云数据中欠挖点和超挖点的rgb数值进行改变,实现对三维重建后的巷道点云数据中欠挖点和超挖点的渲染,并用显示器显示。
[0058]
另一方面,本发明实施例中还针对上述基于三维点云的巷道超欠挖检测方法设计了巷道超欠挖检测系统,系统结构如图3所示,系统包括:输入模块、配准模块、检测模块和可视化模块;
[0059]
所述输入模块同时输入三维重建方法得到三维重建后的巷道点云数据和巷道设计要求的模型点云数据;
[0060]
所述配准模块以巷道设计要求的模型点云数据中的地面和巷道的中心线为配准基准,将三维重建后的巷道点云数据与巷道设计要求的模型点云数据进行配准对齐,使两点云拥有较为一致的姿态;
[0061]
所述检测模块将两个巷道点云数据从直角坐标系转换成柱坐标系;并根据坐标转换后设定的点云的z轴坐标数值与极角数值给点云划分栅格,储存相应坐标的极径数值并
作差,得到超欠挖点坐标;
[0062]
所述可视化模块在栅格中提取参与比较的两点云,分别对三维重建后的巷道点云数据中欠挖点和超挖点的rgb数值进行改变,实现对三维重建后的巷道点云数据中欠挖点和超挖点的渲染,并用显示器显示。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。