技术特征:
1.一种机器人,其特征在于,包括:行走机构、深度相机以及处理器;所述深度相机用于获取目标空间的点云数据,并将所述点云数据发送至处理器;所述处理器用于基于所述点云数据中点云点的第一属性信息,对所述点云数据中的点云点进行聚类,形成至少一个点云组;利用所述至少一个点云组中每个点云组的第二属性信息,从多个预设分类中,确定所述每个点云组的分类;基于所述每个点云组的分类结果,确定所述每个点云组对应的障碍物检测结果,并基于所述障碍物检测结果,控制所述行走机构行走。2.根据权利要求1所述的机器人,其特征在于,所述处理器,在获取目标空间的点云数据时,用于:利用深度相机采集第一原始点云数据;基于所述目标空间的空间范围信息,从所述第一原始点云数据中,确定所述目标空间的点云数据。3.根据权利要求1或2所述的机器人,其特征在于,所述处理器,在获取目标空间的点云数据时,用于:获取目标空间的第二原始点云数据;对所述第二原始点云数据进行滤波处理,得到所述目标空间的点云数据。4.根据权利要求1-3任一项所述的机器人,其特征在于,所述第一属性信息,包括下述至少一种:不同点云点之间的空间距离、不同点云点之间的颜色距离、不同点云点之间的法向量距离、不同点云点之间的密度距离、不同点云点之间的梯度距离。5.根据权利要求4所述的机器人,其特征在于,所述不同点云点之间的空间距离,包括下述至少一种:欧式距离、马氏距离、汉明距离、以及曼哈顿距离。6.根据权利要求4所述的机器人,其特征在于,所述处理器,还用于采用下述方式获取不同点云点之间的颜色距离:基于所述目标空间的二维图像,以及所述二维图像中各个像素点与所述点云数据中各个点云点之间的映射关系,确定每个所述点云点的像素值;基于不同点云点分别对应的像素值,确定所述不同点云点之间的颜色距离。7.一种障碍物探测方法,其特征在于,包括:获取目标空间的点云数据;基于所述点云数据中点云点的第一属性信息,对所述点云数据中的点云点进行聚类,形成至少一个点云组;利用所述至少一个点云组中每个点云组的第二属性信息,从多个预设分类中,确定所述每个点云组的分类;基于所述每个点云组的分类结果,确定所述每个点云组对应的障碍物检测结果。8.一种障碍物探测装置,其特征在于,包括:获取模块,用于获取目标空间的点云数据。聚类模块,用于基于所述点云数据中点云点的第一属性信息,对所述点云数据中的点云点进行聚类,形成至少一个点云组。
分类模块,用于利用所述至少一个点云组中每个点云组的第二属性信息,从多个预设分类中,确定所述每个点云组的分类。确定模块,用于基于所述每个点云组的分类结果,确定所述每个点云组对应的障碍物检测结果。9.一种计算机设备,其特征在于,包括:处理器、存储器,所述存储器存储有所述处理器可执行的机器可读指令,所述处理器用于执行所述存储器中存储的机器可读指令,所述机器可读指令被所述处理器执行时,所述机器可读指令被所述处理器执行时执行权利要求7所述的障碍物探测方法。10.一种计算机可读存储介质,其特征在于,该计算机可读存储介质上存储有计算机程序,该计算机程序被运行时执行权利要求7所述的障碍物探测方法。
技术总结
本公开提供一种机器人、障碍物探测方法、装置、计算机设备及存储介质,机器人包括:行走机构、深度相机以及处理器;深度相机用于获取目标空间的点云数据,并将点云数据发送至处理器;处理器用于基于点云数据中点云点的第一属性信息,对点云数据中的点云点进行聚类,形成至少一个点云组;利用至少一个点云组中每个点云组的第二属性信息,从多个预设分类中,确定每个点云组的分类;基于每个点云组的分类结果,确定每个点云组对应的障碍物检测结果,并基于障碍物检测结果,控制行走机构行走。本公开实施例能够在机器人运行过程中对环境中的障碍物实现精确感应,提升机器人的运行效率。提升机器人的运行效率。提升机器人的运行效率。
技术研发人员:郭晓丽 陈超
受保护的技术使用者:北京极智嘉科技股份有限公司
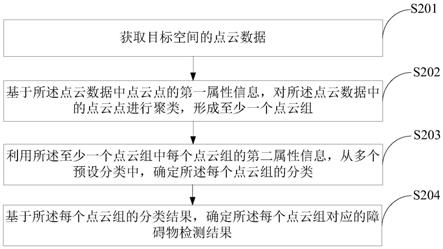
技术研发日:2020.09.27
技术公布日:2022/4/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。