技术特征:
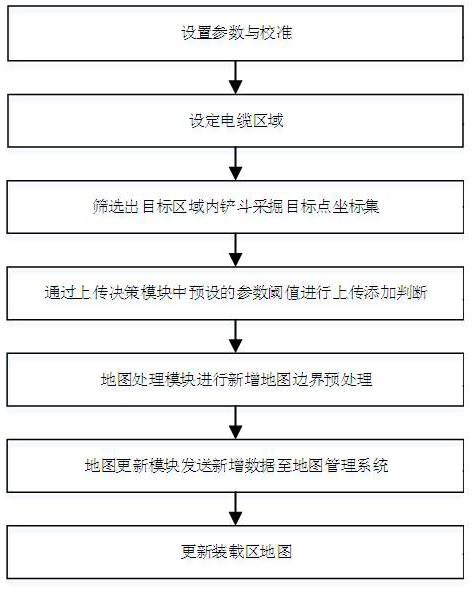
1.露天矿山无人运输系统装载区地图生成方法,其特征在于,包括:在当前采掘周期内,以设定的采样频率采集采掘设备上铲斗定位坐标;根据各铲斗定位坐标确定对应的铲斗斗齿高度;确定当前采掘周期内所有铲斗斗齿高度在装载区地平面实际标高范围内对应的各铲斗定位坐标,根据确定的铲斗定位坐标换算得到铲斗斗齿顶部坐标,将各铲斗斗齿顶部坐标加上预先设定的目标点距铲斗斗齿顶部距离得到当前采掘周期内目标点位置;根据当前采掘周期内获得的目标点位置的数值个数判断铲斗是否完成一次完整的贴地面采掘流程或拉平面采掘流程;若是,则保留当前采掘周期内获得的目标点位置;若否,则删除当前采掘周期内获得的目标点位置;根据各采掘周期内最终获得的所有目标点位置确定新增地图边界。2.根据权利要求1所述的露天矿山无人运输系统装载区地图生成方法,其特征在于,所述地图生成方法还包括实时采集采掘设备中心位置坐标或者采掘设备的回转中心坐标,根据采掘设备中心位置坐标或回转中心坐标确定采掘设备的移动距离,若移动距离大于等于预先设定的移动距离阈值,则触发采掘设备根据各采掘周期内最终获得的所有目标点位置确定新增地图边界。3.根据权利要求1所述的露天矿山无人运输系统装载区地图生成方法,其特征在于,根据各采掘周期内最终获得的所有目标点位置确定新增地图边界,包括:采用地图生成算法求取所有目标点位置最小包围边界,对边界平滑处理并按等比例间隔抽样形成新增边界。4.根据权利要求1所述的露天矿山无人运输系统装载区地图生成方法,其特征在于,判断铲斗是否完成一次完整的贴地面采掘流程或拉平面采掘流程的方法,包括:将所述数值个数乘以采样频率获得铲斗完成一次完整的贴地面采掘流程或拉平面的采掘周期实际花费时间;将确定的采掘周期实际花费时间与预设时间阈值比较,若采掘周期实际花费时间大于等于预设时间阈值,则确定铲斗完成一次完整的贴地面采掘流程或拉平面采掘流程。5.根据权利要求1所述的露天矿山无人运输系统装载区地图生成方法,其特征在于,所述地图生成方法还包括:设置装载点,计算装载点停车位边界四顶点坐标,根据采掘设备车宽车长判断装载点停车位四顶点坐标是否超出装载区地图边界,若装载点或四顶点其中任意一点超出地图边界,则触发采掘设备根据各采掘周期内最终获得的所有目标点位置确定新增地图边界。6.根据权利要求1所述的露天矿山无人运输系统装载区地图生成方法,其特征在于,若采掘设备拖电缆,则确定电缆区域和新增电缆区域,包括:确定电缆起始坐标,根据电缆盘尺寸确定铲斗延伸长度,获取铲斗扫过电缆区域的过程中铲斗延长点的各个位置坐标;采集回转中心坐标,根据电缆起始坐标、回转中心坐标和所采集的铲斗延长点各个位置坐标生成电缆区域边界;采掘设备两履带外边缘行驶区域作为新增电缆区域。7.露天矿山无人运输系统装载区地图生成系统,其特征在于,包括:参数配置模块、定位采集模块以及地图处理模块;所述参数配置模块,用于设定采样频率、装载区地平面实际标高范围和目标点距铲斗斗齿顶部距离;所述定位采集模块,用于在当前采掘周期内,以设定采样频率采集采掘设备上铲斗定
位坐标;所述地图处理模块,用于根据各铲斗定位坐标确定对应的铲斗斗齿高度;确定当前采掘周期内所有铲斗斗齿高度在装载区地平面实际标高范围内对应的各铲斗定位坐标,根据确定的铲斗定位坐标换算得到铲斗斗齿顶部坐标,将各铲斗斗齿顶部坐标加上预先设定的目标点距铲斗斗齿顶部距离得到当前采掘周期内目标点位置;根据当前采掘周期内获得的目标点位置的数值个数判断铲斗是否完成一次完整的贴地面采掘流程或拉平面采掘流程;若是,则保留当前采掘周期内获得的目标点位置;若否,则删除当前采掘周期内获得的目标点位置;根据各采掘周期内最终获得的所有目标点位置确定新增地图边界。8.根据权利要求7所述的露天矿山无人运输系统装载区地图生成系统,其特征在于,所述系统还包括上传决策模块;所述定位采集模块,还用于实时采集采掘设备中心位置坐标或者采掘设备的回转中心坐标;所述上传决策模块,用于根据采掘设备中心位置坐标或回转中心坐标确定采掘设备的移动距离,若移动距离大于等于预先设定的移动距离阈值,则触发采掘设备根据各采掘周期内最终获得的所有目标点位置确定新增地图边界。9.根据权利要求8所述的露天矿山无人运输系统装载区地图生成系统,其特征在于,所述系统还包括地图管理系统,所述地图管理系统用于接收采掘设备上传的新增地图边界,根据新增地图边界更新装载区地图。10.根据权利要求7所述的露天矿山无人运输系统装载区地图生成系统,其特征在于,若采掘设备拖电缆,所述生成系统还包括电缆指定模块,所述电缆指定模块用于确定电缆区域和新增电缆区域,包括:确定电缆起始坐标;根据电缆盘尺寸确定铲斗延伸长度,确定铲斗扫过电缆区域的过程中铲斗延长点的各个位置坐标;所述定位采集模块采集回转中心坐标;所述电缆指定模块用于根据电缆起始坐标、回转中心坐标和所采集的铲斗延长点各个位置坐标生成电缆区域边界;采掘设备两履带外边缘行驶区域作为新增电缆区域。
技术总结
本发明公开了露天矿山无人运输系统装载区地图生成方法和系统,确定当前采掘周期内所有铲斗斗齿高度在装载区地平面实际标高范围内对应的各铲斗定位坐标,换算得到铲斗斗齿顶部坐标,将各铲斗斗齿顶部坐标加上预先设定的目标点距铲斗斗齿顶部距离得到当前采掘周期内目标点位置;进一步判断铲斗是否完成一次完整的贴地面采掘流程或拉平面采掘流程;若是,则保留当前采掘周期内获得的目标点位置;若否,则删除当前采掘周期内获得的目标点位置;根据各采掘周期内最终获得的所有目标点位置确定新增地图边界。本发明舍弃了不完整的贴着地面装载或拉平的操作所获取的目标点位置,最终确定的目标点位置更准确完整地反应了露天矿山装载区边界的变化。矿山装载区边界的变化。矿山装载区边界的变化。
技术研发人员:王龙 杨超 耿乙森
受保护的技术使用者:江苏徐工工程机械研究院有限公司
技术研发日:2022.03.08
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。