1.本发明属于巡检机器人技术领域,尤其涉及一种悬挂式巡检机器人的走行装置。
背景技术:
2.空铁的轨道梁通过梁柱架设于空中,占地面积少,尽最大可能减小拆迁量,不改变城市的原有交通设计,空铁这种新型的交通方式能极大缓解各个城市的路面交通拥堵现象。
3.悬挂式巡检机器人在空铁轨道梁的道岔处行走时,不仅转向困难,而且由于一侧走行轮悬空,导致转向时安全性和稳定性较低,因此针对上述问题,需要一种能够方便转向走行的装置。
技术实现要素:
4.(一)要解决的技术问题
5.针对现有存在的技术问题,本发明提供一种悬挂式巡检机器人的走行装置,不仅结构简单,而且能够很方便地在道岔口处转向走行,保障悬挂式巡检机器人的运行安全。
6.(二)技术方案
7.为了达到上述目的,本发明采用的主要技术方案包括:
8.一种悬挂式巡检机器人的走行装置,包括:走行架单元、走行轮组单元和磁吸转向机构;
9.所述走行轮组单元和所述磁吸转向机构均设置在所述走行架单元上;
10.所述走行架单元能够借助于所述走行轮组单元在空中轨道梁内走行;
11.所述走行架单元能够借助于所述走行轮组单元和所述磁吸转向机构平稳转向通过空中轨道梁内的道岔分路;
12.其中,所述磁吸转向机构包括:左侧磁吸抬升组件、左侧转向偏移组件、右侧磁吸抬升组件和右侧转向偏移组件;
13.所述左侧磁吸抬升组件和所述右侧磁吸抬升组件对称固定设置在所述走行架单元上,并能够分别与轨道梁顶部之间构成磁吸力,分别用以克服左侧和右侧的所述走行轮组单元在道岔口架空时的下沉力。
14.优选地,所述左侧转向偏移组件和所述右侧转向偏移组件分别设置在所述走行架单元两侧;
15.所述左侧转向偏移组件能够与空中轨道梁的左侧内壁之间产生磁吸牵引力,用以将走行架单元往左侧牵引;
16.所述右侧转向偏移组件能够与空中轨道梁的右侧内壁之间产生磁吸牵引力,用以将走行架单元往右侧牵引。
17.优选地,所述走行轮组单元包括:多组走行轮;
18.每一组走行轮均对称设置在所述走行架单元的两侧;
19.所述走行架单元上还设有驱动装置;
20.所述驱动装置分别与每一组所述走行轮驱动连接;
21.所述走行架单元能够借助于悬挂减振装置连接巡检主机;
22.巡检主机与所述驱动装置控制连接,并能够控制所述驱动装置带动所述走行轮在空中轨道梁内走行。
23.优选地,所述左侧磁吸抬升组件和所述右侧磁吸抬升组件的结构相同;
24.所述左侧转向偏移组件和所述右侧转向偏移组件的结构相同;
25.优选地,所述左侧磁吸抬升组件包括:可折叠竖直悬臂、第一可控磁吸产生装置和第一测距装置;
26.所述可折叠竖直悬臂的一端固定设置在所述走行架单元的左侧;
27.所述可折叠竖直悬臂的另一端固定设置所述第一可控磁吸产生装置和所述第一测距装置;
28.所述可折叠竖直悬臂、所述第一可控磁吸产生装置和所述第一测距装置均与所述巡检主机控制连接。
29.优选地,所述可折叠竖直悬臂能够可控折叠或展开;
30.当所述可折叠竖直悬臂展开时,位于所述可折叠竖直悬臂一端的所述第一可控磁吸产生装置和所述第一测距装置均能够接近轨道梁的顶部;
31.所述第一测距装置能够实时测定所述第一可控磁吸产生装置与轨道梁顶部之间的距离。
32.优选地,所述走行架单元还包括:走行架和多组走行轴;
33.多组所述走行轴均设置在所述走行架上,并与所述驱动装置连接;
34.多组走行轮就分别对应设置在所述多组走行轴上;
35.所述驱动装置能够通过所述多组走行轴驱动所述多组走行轮转动。
36.优选地,所述左侧转向偏移组件设置在所述走行架的左侧或所述走行轴的末端;
37.所述左侧转向偏移组件包括:第二可控磁吸产生装置和第二测距装置;
38.所述第二可控磁吸产生装置和所述第二测距装置均与所述巡检主机控制连接;
39.优选地,所述第二可控磁吸产生装置和所述第二测距装置设置在所述走行架的左侧,或设置在所述走行轴的左侧端;
40.当所述第二可控磁吸产生装置和所述第二测距装置设置所述走行轴的左侧端时,所述第二可控磁吸产生装置和所述第二测距装置还与位于左侧的走行轮的左侧面连接。
41.优选地,所述第二测距装置能够实时测定所述第二可控磁吸产生装置与轨道梁左侧壁之间的距离;
42.所述巡检主机能够控制所述第二可控磁吸产生装置与轨道梁左侧壁之间产生磁吸力,用以牵引所述走行架向左侧转向偏移;
43.当所述走行架向左侧偏移时,所述右侧磁吸抬升组件与轨道梁顶部之间构成磁吸力,用以克服右侧的所述走行轮组单元在道岔口架空时的下沉力。
44.(三)有益效果
45.本发明的有益效果是:本发明提供的一种悬挂式巡检机器人,具有以下有益效果:
46.不仅结构简单,而且能够很方便地在道岔口处转向走行,保障悬挂式巡检机器人
的运行安全。
47.【附图标记说明】
48.1:巡检主机;2:悬挂减振装置;3:走行架单元;4:左侧走行轮;5:右侧走行轮;6:左侧转向偏移组件;7:右侧转向偏移组件;8:左侧磁吸抬升组件;9:右侧磁吸抬升组件;10:轨道梁。
附图说明
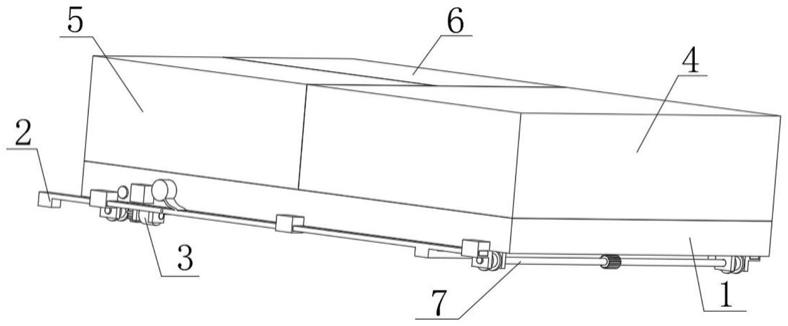
49.图1为本发明提供的一种悬挂式巡检机器人的走行装置的结构示意图;
50.图2为本发明提供的一种悬挂式巡检机器人的走行装置的连接控制结构示意图;
51.图3为本发明提供的一种悬挂式巡检机器人的走行装置的侧面结构示意图;
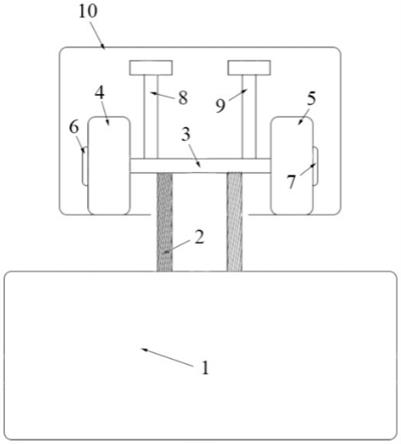
52.图4为本发明实施例中的轨道梁道岔分路的结构示意图。
具体实施方式
53.为了更好的解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明作详细描述。
54.如图1-图4所示:一种悬挂式巡检机器人的走行装置,包括:走行架单元3、走行轮组单元和磁吸转向机构;所述走行轮组单元和所述磁吸转向机构均设置在所述走行架单元上3;所述走行架单元3能够借助于所述走行轮组单元在空中轨道梁10内走行;所述走行架单元3能够借助于所述走行轮组单元和所述磁吸转向机构平稳转向通过空中轨道梁10内的道岔分路。
55.应说明的是:如图4所示:该道岔分路是指y字型的空中轨道梁10线路,由一条主路分岔为两条支路通向不同的方向。
56.其中,所述磁吸转向机构包括:左侧磁吸抬升组件8、左侧转向偏移组件6、右侧磁吸抬升组件9和右侧转向偏移组件7;所述左侧磁吸抬升组件8和所述右侧磁吸抬升组件9对称固定设置在所述走行架单元3上,并能够分别与轨道梁10顶部之间构成磁吸力,分别用以克服左侧和右侧的所述走行轮组单元在道岔口架空时的下沉力。
57.应说明的是:这里的下沉力包括:巡检主机1的分重力和走行装置的分重力,如果没有磁吸力的抬升克服该力的话,走行装置会直接侧翻甚至从轨道梁10上掉落下,产生严重的事故。
58.本实施例中所述的左侧转向偏移组件6和所述右侧转向偏移组件7分别设置在所述走行架单元3两侧;所述左侧转向偏移组件6能够与空中轨道梁10的左侧内壁之间产生磁吸牵引力,用以将走行架单元3往左侧牵引;所述右侧转向偏移组件7能够与空中轨道梁10的右侧内壁之间产生磁吸牵引力,用以将走行架单元3往右侧牵引。
59.详细地,左侧转向偏移组件6在需要转向左侧的道岔支路时工作,右侧转向偏移组件7在需要转向右侧的道岔支路时工作,且两者不能够同时工作。
60.本实施例中所述的走行轮组单元包括:多组走行轮4;每一组走行轮4均对称设置在所述走行架单元3的两侧;所述走行架单元3上还设有驱动装置;所述驱动装置分别与每一组所述走行轮4驱动连接;所述走行架单元3能够借助于悬挂减振装置2连接巡检主机1;巡检主机1与所述驱动装置控制连接,并能够控制所述驱动装置带动所述走行轮4在空中轨
道梁10内走行。
61.该驱动装置用以驱动走行轮4转动,用以实现在轨道梁10上走行,同时受巡检主机1的控制。
62.本实施例中所述的左侧磁吸抬升组件8和所述右侧磁吸抬升组件9的结构相同;所述左侧转向偏移组件6和所述右侧转向偏移组件7的结构相同;
63.本实施例中所述的左侧磁吸抬升组件8包括:可折叠竖直悬臂、第一可控磁吸产生装置和第一测距装置;所述可折叠竖直悬臂的一端固定设置在所述走行架单元3的左侧;所述可折叠竖直悬臂的另一端固定设置所述第一可控磁吸产生装置和所述第一测距装置;所述可折叠竖直悬臂、所述第一可控磁吸产生装置和所述第一测距装置均与所述巡检主机1控制连接。
64.本实施例中所述可折叠竖直悬臂能够可控折叠或展开;
65.当所述可折叠竖直悬臂展开时,位于所述可折叠竖直悬臂一端的所述第一可控磁吸产生装置和所述第一测距装置均能够接近轨道梁10的顶部;所述第一测距装置能够实时测定所述第一可控磁吸产生装置与轨道梁10顶部之间的距离。
66.在实际应用中,第一测距装置能够实时测定第一可控磁吸产生装置与轨道梁10顶部之间的距离,用以避免第一可控磁吸产生装置与轨道梁10顶部吸在一起。
67.本实施例中所述的走行架单元3还包括:走行架和多组走行轴;多组所述走行轴均设置在所述走行架上,并与所述驱动装置连接;多组走行轮就分别对应设置在所述多组走行轴上;所述驱动装置能够通过所述多组走行轴驱动所述多组走行轮4转动。
68.本实施例中所述的左侧转向偏移组件6设置在所述走行架的左侧或所述走行轴的末端;所述左侧转向偏移组件6包括:第二可控磁吸产生装置和第二测距装置。
69.所述第二可控磁吸产生装置和所述第二测距装置均与所述巡检主机1控制连接。
70.本实施例中所述的第二可控磁吸产生装置和所述第二测距装置设置在所述走行架的左侧,或设置在所述走行轴的左侧端。
71.具体地,当所述第二可控磁吸产生装置和所述第二测距装置设置所述走行轴的左侧端时,所述第二可控磁吸产生装置和所述第二测距装置还与位于左侧的走行轮4的左侧面连接。
72.本实施例中所述的第二测距装置能够实时测定所述第二可控磁吸产生装置与轨道梁左侧壁之间的距离;所述巡检主机1能够控制所述第二可控磁吸产生装置与轨道梁左侧壁之间产生磁吸力,用以牵引所述走行架向左侧转向偏移。
73.当所述走行架向左侧偏移时,所述右侧磁吸抬升组件9与轨道梁10顶部之间构成磁吸力,用以克服右侧的所述走行轮组单元在道岔口架空时的下沉力。
74.反之,同理,当所述走行架向右侧偏移时,所述左侧磁吸抬升组件8与轨道梁10顶部之间构成磁吸力,用以克服左侧的所述走行轮组单元在道岔口架空时的下沉力。
75.以上结合具体实施例描述了本发明的技术原理,这些描述只是为了解释本发明的原理,不能以任何方式解释为对本发明保护范围的限制。基于此处解释,本领域的技术人员不需要付出创造性的劳动即可联想到本发明的其它具体实施方式,这些方式都将落入本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。