技术特征:
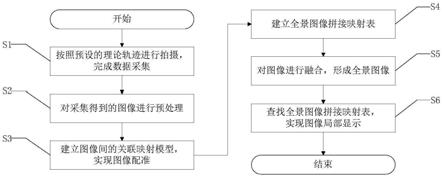
1.一种光学模拟训练系统中的全景图像拼接方法,其特征在于,包括以下步骤:s1、光电经纬仪按照预设的理论轨迹进行拍摄,完成数据采集;s2、对采集得到的图像进行预处理;s3、建立图像间的关联映射模型,实现图像配准;s4、建立全景图像拼接映射表;s5、根据映射关系,对图像进行融合,形成全景图像;s6、根据所需显示的角度,通过二次寻址的方法查找全景图像拼接映射表,实现图像局部显示。2.如权利要求1所述的光学模拟训练系统中的全景图像拼接方法,其特征在于,所述步骤s1中预设的理论轨迹为光电经纬仪的角度引导数据。3.如权利要求2所述的光学模拟训练系统中的全景图像拼接方法,其特征在于,所述步骤s1中,在拍摄时,保持光电经纬仪位置不动,预设的理论轨迹将按照俯仰角度由低到高的顺序,在每个固定的俯仰角度下引导光电经纬仪匀速旋转360度,按照拍摄图像的视场大小,确保在相邻方位和俯仰角度下,拍摄视频图像的范围存在重合区域。4.根据权利要求1所述的光学模拟训练系统中的全景图像拼接方法,其特征在于,所述步骤s2中预处理包括以下步骤:s21、判断采集的图像;若为红外图像,则进入步骤s22;若为可见光图像,则进入步骤s24;s22、对红外图像进行图像增强;s23、亮度增强,进入步骤s24;s24、对采集到的图像进行中值滤波的方法去噪处理。5.根据权利要求1所述的光学模拟训练系统中的全景图像拼接方法,其特征在于,所述步骤s3中建立图像间的关联映射模型包括以下步骤:s31、根据光电经纬仪的视场范围(横向α,纵向β)及像元尺寸μ估算出全景图像的尺寸,横向:width=360/(α
·
μ),纵向:height=90/(β
·
μ);s32、在内存中分配width*height大小的空间,记为拼接图m;s33、逐帧读取光电经纬仪拍摄的视频图像,获取图像的文件头信息中附加的编码器角度、像元尺寸等信息;s34、根据图像中每个像素点的合成角度,反算出该点在拼接图m中的位置信息,并写入m中;s35、重复步骤s33-s34,直到获得视频图像中所有像素点在拼接图m中的位置,从而建立起图像间的关系映射模型。6.根据权利要求5所述的光学模拟训练系统中的全景图像拼接方法,其特征在于,所述步骤s34中根据图像中每个像素点的合成角度,反算出该点在拼接图m中的位置信息包括以下步骤:s341、建立合成目标角度公式如下所示,其中a代表方位角,e代表俯仰角,f代表焦距:
a=a0 δas342、将公式进行化简,得到近似的合成目标角度公式:s342、将公式进行化简,得到近似的合成目标角度公式:s343、根据以上公式,若已知某点相对于中心点的角度偏移量,则可以反算出两点间的位置关系,实现图像上任意点的角度值(a,e)与坐标值(x,y)的转换。7.根据权利要求1所述的光学模拟训练系统中的全景图像拼接方法,其特征在于,所述步骤s4中建立全景图像拼接映射表包括以下步骤:s41、在拼接过程中,记录对应的俯仰角度值;s42、将俯仰角从0
°
开始,间隔0.5
°
作为一个俯仰角度带,每个角度带上,方位角从0
°
开始,间隔3
°
将与该度数对应的像素距离最近的真实图像角度值及像素点位置进行记录;s43、重复s41和s42直至图像映射关系全部建立。8.根据权利要求1所述的光学模拟训练系统中的全景图像拼接方法,其特征在于,所述步骤s5中图像融合包括以下步骤:s51、根据建立好的映射模型,判断图像上的点是否位于重叠位置;若位于重叠位置当中,则进入步骤s52;若未在重叠位置,则进入步骤s54;s52、计算该点在所属的所有图像s1、s2,
…
,s
n
中的权值i
′1,i
′2,
…
i
′
n
;n为该点所在重叠图像的个数;s53、将该点在不同图像上的灰度值r1、r2…
r
n
和对应的权值i
′1,i
′2,
…
i
′
n
相乘,得到融合后该点的灰度值进入步骤s55;s54、保留该点的灰度值r1作为融合后该点的灰度值r0=r1,进入步骤s55;s55、得到该点在最终拼接图像中对应的灰度值r0;s56、将映射模型中的所有点分别按照s51-s54的步骤进行处理,即可得到融合后的图像。9.根据权利要求6所述的场光学模拟训练系统中的全景图像拼接方法,其特征在于,所述步骤s52中计算该点在所属的所有图像中的权值具体表现为:s521、在该点所属的所有图像中计算该点(x,y),在相应图像上与其对应的图像中心点o1(x1,y1)、o2(x2,y2),
…
,o
n
(x
n
,y
n
)之间的距离n为该点所在重叠图像的个数;s522、计算得到该点对应的权值
s523、重复步骤s521-s522,得到该点对应的所有权值i1、i2,
…
,i
n
;s524、将所有权值进行归一化处理,即可得到该点最终在各重叠图像上的权值i
′1,i
′2,
…
i
′
n
。10.根据权利要求1所述的光学模拟训练系统中的全景图像拼接方法,其特征在于,所述步骤s6图像局部显示包括以下步骤:s61、根据需要显示图像的中心点角度值在全景图像拼接映射表中进行查表,假设某一需要显示局部图像的中心点所对应的拍摄角度为方位角a和俯仰角e;s62、在映射表中根据俯仰角e所在的角度值进行查询,得到其对应的纵轴寻址基准,将其像素纵坐标记为y;s63、在俯仰角e所对应的角度值表中,计算得到该俯仰角下方位角a所属的3
°
区间,将该区间对应的边界方位角角度值为a
n
和a
n 1
,比较a-a
n
和a
n 1-a的绝对值,若a-a
n
的绝对值较小,则将an作为寻址基准,反之,则以a
n 1
为寻址基准,将寻址基准的像素横坐标记为x;s64、确定方位角的寻址基准后,需要对像素坐标进行二次寻址,利用脱靶量的计算方法,得到该点相对于寻址基准的像素坐标偏移量δx和δy,由此得到该点在全景图像上的像素坐标位置(x δx,y δy);s65、将查询得到像素点作为显示图像的中心,分别选取中心点横纵轴上图像显示尺寸的一半进行显示即可。
技术总结
本发明属于图像处理技术领域,涉及一种光学模拟训练系统中的全景图像拼接方法。该方法包括:光电经纬仪按照预设的理论轨迹进行拍摄;对采集得到的图像进行预处理;建立图像间的关联映射模型实现图像配准;建立全景图像拼接映射表;根据映射关系对图像进行融合形成全景图像;根据所需显示的角度,通过二次寻址的方法查找全景图像拼接映射表,实现图像局部显示。本发明全景拼接方法解决了将现有全景图像拼接方法直接实现时,利用多台套光电经纬仪进行数据采集时可能会出现的成本过高和图像精度受影响的问题,也解决了拍摄图像中无明显特征物,进而无法使用特征点匹配拼接方法的问题。题。题。
技术研发人员:贾涛 李玲 钟坚 马蕾 李福林 葛超 董圆 王子鹏 刘洋 丁焕玉 张衍滨 朱晓兵 汪向阳 金毅
受保护的技术使用者:中国人民解放军63861部队
技术研发日:2021.12.08
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。