技术特征:
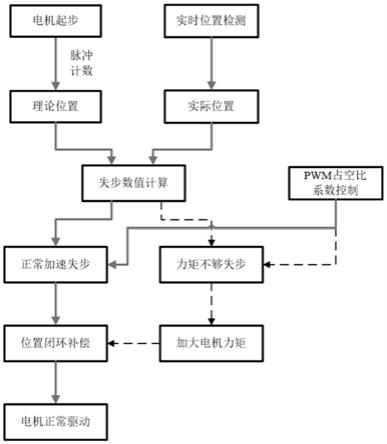
1.一种基于位置闭环控制的步进电机自适应力矩调节方法,其特征在于,包括以下步骤:s1、设置位置传感器实时监测步进电机的失步数;s2、控制系统根据所述失步数对步进电机的驱动脉冲进行调节,实现步进电机的自适应力矩调节。2.如权利要求1所述的一种基于位置闭环控制的步进电机自适应力矩调节方法,其特征在于,所述的步骤s1进一步的包含以下步骤:s11、设置位置传感器,形成闭环控制系统;s12、使用位置传感器实时监测步进电机的失步数。3.如权利要求1所述的一种基于位置闭环控制的步进电机自适应力矩调节方法,其特征在于,采用旋转变压器作为所述位置传感器。4.如权利要求3所述的一种基于位置闭环控制的步进电机自适应力矩调节方法,其特征在于,所述旋转变压器设置在所述步进电机的侧面,该旋转变压器的可旋转部分与所述步进电机同步旋转,且该旋转变压器的旋转轴与步进电机的旋转轴相同。5.如权利要求1所述的一种基于位置闭环控制的步进电机自适应力矩调节方法,其特征在于,所述失步数为步进电机旋转的理论位置与实际位置之差。6.如权利要求5所述的一种基于位置闭环控制的步进电机自适应力矩调节方法,其特征在于,控制系统通过调整驱动脉冲的pwm占空比数值,使驱动电流变化,从而使输出力矩变化。7.如权利要求6所述的一种基于位置闭环控制的步进电机自适应力矩调节方法,其特征在于,所述步骤s2具体为:当控制系统根据所述失步数判断步进电机的驱动力矩不足时,提高所述驱动脉冲的的pwm占空比数值,使步进电机达到正常转速。8.如权利要求7所述的一种基于位置闭环控制的步进电机自适应力矩调节方法,其特征在于,所述驱动力矩不足的表现情况包括:在步进电机加速过程中,单位时间内的失步数的增量超过预先设置的第一允许范围a;在步进电机匀速过程中,单位时间内的失步数大于第二允许范围b。9.如权利要求8所述的一种基于位置闭环控制的步进电机自适应力矩调节方法,其特征在于,所述第一允许范围a为步进电机加速阶段的理论加速度的1/5;所述第二允许范围b为单位时间内步进电机的步距角理论值的1/20。10.如权利要求9所述的一种基于位置闭环控制的步进电机自适应力矩调节方法,其特征在于,通过调整所述的第一允许范围a和第二允许范围b,可以改变因力矩不足导致失步的监测敏感度以及电机响应速度。
技术总结
本发明公开了一种基于位置闭环控制的步进电机自适应力矩调节方法,包括以下步骤:S1、设置位置传感器实时监测步进电机的失步数;S2、控制系统根据所述失步数对步进电机的驱动脉冲进行调节,实现步进电机的自适应力矩调节。本发明可根据电机阻力和负载变化情况自动调节驱动力矩,避免使用大功率的浪费和电机损耗,增长电机的使用寿命。增长电机的使用寿命。增长电机的使用寿命。
技术研发人员:饶范钧 石然 黎枭 王超 吴鹏飞 胡羽行 高福隆
受保护的技术使用者:上海航天控制技术研究所
技术研发日:2021.11.26
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。