技术特征:
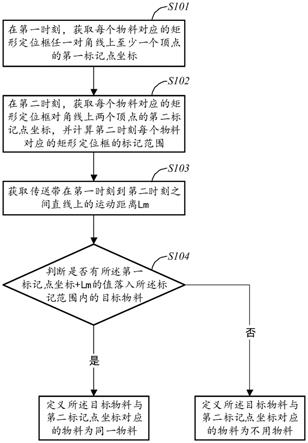
1.一种物料的检测及分类方法,其特征在于,其包括如下步骤:在第一时刻,获取每个物料对应的矩形定位框任一对角线上至少一个顶点的第一标记点坐标;在第二时刻,获取每个物料对应的矩形定位框对角线上两个顶点的第二标记点坐标,并计算第二时刻每个物料对应的矩形定位框的标记范围;获取传送带在第一时刻到第二时刻之间直线上的运动距离lm;判断是否有所述第一标记点坐标 lm的值落入所述标记范围内的目标物料,若是,则定义所述目标物料与第二标记点坐标对应的物料为同一物料。2.如权利要求1所述的物料的检测及分类方法,其特征在于,在第一时刻,获取每个物料对应的矩形定位框任一对角线上两顶点的标记点坐标为第一标记点坐标。3.如权利要求1所述的物料的检测及分类方法,其特征在于,所述方法还包括:在第一时刻赋予所述的每个物料以身份编号,若经判断后所述目标物料与第二标记点坐标对应的物料为同一物料,则保持身份编号一致;若不为同一物料,则赋予该物料以新的身份编号。4.如权利要求1所述的物料的检测及分类方法,其特征在于,所述方法还包括:在所述的第一时刻、第二时刻分别获取每个物料的2d及3d鸟瞰图像数据;将2d鸟瞰图像数据与3d鸟瞰图像数据相配准得到每个物料的rgb-d图像数据;将所述rgb-d图像数据加载入深度学习图像算法,进行特征提取,获得每个物料的矩形定位框、抓取点及类别信息。5.根据权利要求4所述的物料的检测及分类方法,其特征在于,所述方法还包括:预处理rgb-d图像数据:去畸变和尺寸缩放。6.根据权利要求4所述的物料的检测及分类方法,其特征在于,将所述rgb-d图像数据加载入深度学习图像算法,进行特征提取,获得每个物料的矩形定位框、抓取点及类别信息,具体包括:自上而下提取三层输出、降采样两次,获得五层特征输出层;采用构建特征金字塔方式进行特征融合;获得第一矩形定位框及类别信息。7.根据权利要求6所述的物料的检测及分类方法,其特征在于,所述方法还包括:后处理所述第一矩形定位框及类别信息:根据所述物料的所述第一矩形定位框及类别信息,判断物料的可回收概率;根据可回收概率,进行阈值抑制,去除概率低的矩形定位框;加载非极大值抑制算法(nms),对所述第一矩形定位框及类别信息去重;根据去重后的矩形定位框及类别信息,抑制可回收概率低的矩形定位框所对应的物料,保留可回收概率高的矩形定位框及类别信息;获得第二矩形定位框及类别信息。8.根据权利要求4所述的物料的检测及分类方法,其特征在于,所述方法还包括:终处理所述的每个物料的2d及3d鸟瞰图像数据、第二矩形定位框及类别信息:提取单个物料的矩形定位框,放入与原图相同大小的数组中;对该数组进行灰度图转化、滤波、二值化和形态学闭运算;
计算该二值化图像的最大内切圆圆心,该圆心即为物料的抓取点;获得最终的物料抓取点、矩形定位框及类别信息。9.根据权利要求8所述的物料的检测及分类方法,其特征在于,所述物料图像的最大内切圆,若该内切圆半径小于吸盘式蜘蛛机械手的吸盘半径,则不抓取该物料。10.一种物料的检测及分类装置,其特征在于,包括:存储器和处理器,所述存储器存储有可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现权利要求1-9中任意一项所述的物料的检测及分类方法的步骤。11.一种计算机存储介质,其特征在于,其中存储有计算机程序,并且所述计算机程序运行时导致所述计算机存储介质的所在设备执行根据权利要求1-9中任意一项所述的物料的检测及分类方法的步骤。
技术总结
本发明提供一种物料的检测及分类方法,所述方法包括:在第一时刻,获取每个物料对应的矩形定位框任一对角线上至少一个顶点的第一标记点坐标;在第二时刻,获取每个物料对应的矩形定位框对角线上两个顶点的第二标记点坐标,并计算第二时刻每个物料对应的矩形定位框的标记范围;获取传送带在第一时刻到第二时刻之间直线上的运动距离Lm;判断是否有所述第一标记点坐标 Lm的值落入所述标记范围内的目标物料,若是,则定义所述目标物料与第二标记点坐标对应的物料为同一物料。坐标对应的物料为同一物料。坐标对应的物料为同一物料。
技术研发人员:袁靖 周翔 沈俊
受保护的技术使用者:甄智(苏州)智能科技有限公司
技术研发日:2021.12.09
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。