技术特征:
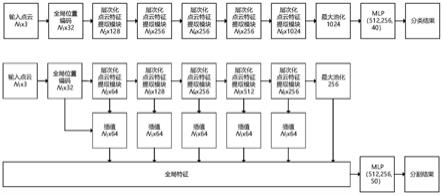
1.一种基于通道注意力的点云识别方法,其特征在于,包括如下步骤:输入点云,进行全局位置编码;进行层次化点云特征提取,获取点云的全局特征;利用点云的全局特征进行分类和部件分割。2.如权利要求1所述的基于通道注意力的点云识别方法,其特征在于,层次化点云特征提取方法为:以点云位置信息和所述全局位置编码作为第一层层次化点云特征提取模块的输入,将第一层点云特征提取模块的输出当作第二层层次化点云特征提取模块的输入,依次类推,不断堆叠层次化点云特征提取模块,最后一层输出全局特征;在层次化点云特征提取模块中,先将点云采样和分组,再进行层次化局部位置编码,对层次化局部位置编码通过多层感知器提取层次化特征;对提取到的层次化特征使用通道注意力进行注意力特征融合,提取点云的空间特征,最后通过多层感知器和池化层进一步提取点云的空间特征,作为该层层次化点云特征提取模块的输出。3.如权利要求1所述的基于通道注意力的点云识别方法,其特征在于,全局位置编码的方法如下:接收到点云的输入信息后,进行全局位置编码,全局位置编码δ定义为:δ=θ(p
i
)其中,p
i
是点i的空间坐标,编码函数θ是感知器。4.如权利要求2所述的基于通道注意力的点云识别方法,其特征在于,对点云进行采样的方法为:a.输入点云有n个点,从点云中选取一个点p0作为起始点,得到采样点集合s={p0};b.计算点云所有点到点p0的距离,构成n维数组l,从数组l中选择最大值对应的点作为p1,更新采样点集合s={p0,p1};c.计算点云所有点到p1的距离,对于每一个点pi,其距离p1的距离如果小于l[i],则更新l[i]=d(pi,p1),因此,数组l中存储的一直是每一个点到采样点集合s的最近距离;d.选取l中最大值对应的点作为p2,更新采样点集合s={p0,p1,p2};e.重复b-d步骤,直至采样到n’个目标采样点为止。5.如权利要求2或4所述的基于通道注意力的点云识别方法,其特征在于,点云分组的方法为:以得到的采样点为基础进行分组:输入点云有n个点,采样点有n’个点,参数为手动设置的组内点云数k和范围r;在输入点云中以每个采样点为中心,半径为r的球形范围内任取k个点,若点的数量不足k,则用采样点填充不足的数量;经过采样和分组后,得到了点云的分组空间坐标和分组空间特征。6.如权利要求2所述的基于通道注意力的点云识别方法,其特征在于,层次化局部位置编码的方法如下:考虑每层点云的空间特征,分层提取点云的局部特征,局部位置编码ε为:ε=g(h(p
i-p
j
) x
i
)其中,p
i
,p
j
是点i,点j的空间坐标;x
i
表示点i的层次化特征;函数h,g是多层感知器;函
数h用于对点云层次化局部空间特征进行位置编码;函数g用于融合点云的层次化特征和层次化位置编码。7.如权利要求2所述的基于通道注意力的点云识别方法,其特征在于,使用通道注意力进行注意力特征融合的方法如下:将点云的层次化特征进行通道全局平均池化,得到全局通道特征;对全局通道特征进行一维卷积,在神经网络中学习各个通道间的关系,得到不同通道的权重;将不同通道的权重乘以点云的层次化特征,得到带有通道注意力的点云的空间特征;通道注意力计算方法:z
i
=x
i
*sigmod(f(gap(x
i
)))其中,x
i
表示点i的层次化特征,gap是全局平均池化操作,函数f是1维卷积,sigmod是激活函数;通过这种方法可关注信息量最大的通道特征,而抑制那些不重要的通道特征。8.一种基于通道注意力的点云识别系统,其特征在于,包括点云获取模块和层次化点云特征提取模块,所述点云获取模块的输出端与层次化点云特征提取模块的输入端连接,所述层次化点云特征提取模块执行权利要求1-7之一所述方法,进行点云识别。9.如权利要求8所述的基于通道注意力的点云识别系统,其特征在于,所述层次化点云特征提取模块的第一输入端用于接收点云的空间坐标,层次化点云特征提取模块的第二输入端用于接收点云的层次化空间特征;点云识别系统中设有多个层次化点云特征提取模块,在第1个层次化点云特征提取模块中,为点云的全局位置编码,之后的第2,3,
…
,n个层次化点云特征提取模块的输入为第1,2,3,
…
,n-1层的层次化点云特征提取模块的层次化空间特征输出;层次化点云特征提取模块的第一输出端用于输出处理后的点云的空间坐标,层次化点云特征提取模块的第二输出端用于输出点云的层次化空间特征;层次化点云特征提取模块,在接收两个输入后,首先进行采样和分组,采样使用最远点采样;采样和分组后,进行层次化局部位置编码,对层次化局部位置编码通过多层感知器提取层次化特征;对提取到的层次化特征使用通道注意力进行注意力特征融合,提取点云的空间特征,最后通过多层感知器和池化层进一步提取点云的空间特征,作为该层层次化点云特征提取模块的输出。10.如权利要求8所述的基于通道注意力的点云识别系统,其特征在于,所述层次化点云特征提取模块包括层次化局部位置编码模块和注意力融合模块;所述层次化局部位置编码模块,用于得到层次化局部位置编码;所述注意力融合模块,用于将点云层次化局部位置编码进行注意力特征融合,得到点云的空间特征。
技术总结
本发明属于三维数据处理技术领域,具体公开了一种基于通道注意力的点云识别方法及系统,该方法利用输入点云,进行全局位置编码,以点云位置信息和全局位置编码作为第一层层次化点云特征提取模块的输入,将第一层点云特征提取模块的输出当作第二层层次化点云特征提取模块的输出,依次类推,堆叠多层,最后一层输出全局特征,在层次化点云特征提取模块中,将点云采样和分组,进行层次化局部位置编码,进行注意力特征融合提取点云的空间特征。采用本技术方案,在原始点云数据的基础上,分别基于点云的全局、局部位置进行了位置编码,从而将全局、局部位置信息融入点云特征中,同时融合通道注意力提取点云的通道特征,增加点云特征提取的效果。提取的效果。提取的效果。
技术研发人员:周虹宇 张敏
受保护的技术使用者:重庆大学
技术研发日:2022.01.05
技术公布日:2022/4/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。