1.本发明涉及到对地面的清洁领域,具体涉及到一种清洁机及其控制方法。
背景技术:
2.现有清洁机主要在地面上执行拖地或洗地清洁功能,主要设置滚筒、清水箱和污水箱,滚筒用于来接触地面进行清洁处理,清水箱主要用于向滚筒来提供清水,滚筒在有清水的情况下以及在对地面清洁的过程中会形成污水,污水会被收集到污水箱内,以便用户来对污水箱维护,同时防止污水来对地面形成二次污染。
3.其中,在污水箱收集污水的过程中,现有技术中一般设置具备气流的吸力的风机来实现对污水进行吸取到污水箱内收集,针对手持结构的清洁机,一般将污水箱设置在推杆上,用户通过推杆来实现带动清洁机在地面上移动,有将污水箱设置在推杆上,当用户在手持推杆进行旋转倾斜来对室内的桌底、床底或沙发底等低矮空间进行清洁处理时,此时会形成推杆呈较大的倾斜角度才能实现用户的清洁需求,当推杆形成较大的倾斜角度时则对应的污水箱内的污水也会同步倾斜,此时很容易导致出现污水倒流进入到风机内导致风机被损坏,严重影响清洁机的使用安全,同时现有技术中无法有效的来对污水箱内的污水进行及时检测来防止污水倒流进入到风机内,导致清洁机的整体可靠性和安全性较低。
技术实现要素:
4.本发明旨在至少在一定程度上解决上述相关技术中的技术问题之一。
5.为此,本发明的目的在于提供清洁机及其控制方法,主要解决现有清洁机中无法有效的来对污水进行检测防止污水倒流进入风机的问题,以及污水容易倒流进入风机导致引起风机损坏的问题。
6.本发明的实施方式提供了一种清洁机,包括推杆主体和地拖主体,推杆主体可旋转的安装于地拖主体上,设置推杆主体相对地拖主体进行旋转来呈倾斜结构的朝向方向为后侧方向,对应的相反一侧方向为前侧方向;
7.推杆主体上安装有污水箱,污水箱内设置有污水腔,污水腔的上部设置有触感模块;
8.污水腔的上部设置有气流口;
9.触感模块至少包括触感件,至少触感件的一部分设置为位于污水腔内来使得当推杆主体相对地拖主体旋转形成倾斜角度a且污水腔内的污水液面朝向上方至气流口的最底部位置的距离为h0时构成至少触感件的一部分位于污水液面以下。
10.前述的清洁机,设置污水箱沿推杆主体的长度方向上来构成的污水腔的长度为h且设置0<h0≤h/2来使得气流口位于污水液面的上方;
11.和/或,设置角度a为大于90度且小于180度或设置角度a为大于等于150度且小于等于170度。
12.前述的清洁机,气流口设置为可朝向污水腔方向来与污水腔呈相连通的结构;
13.设置触感件位于气流口的后侧或设置触感件的后侧部位置至污水腔的后侧部位置的距离h1小于等于气流口的后侧部位置至污水腔的后侧部位置的距离h2。
14.前述的清洁机,触感件与气流口设置为呈并列间隔分布的结构使得当推杆主体相对地拖主体旋转形成倾斜角度a时可构成污水腔内的污水液面至少淹没触感件的一部分且污水腔内的污水液面不淹没气流口。
15.前述的清洁机,设置气流口位于污水箱的前侧部位置与污水箱上沿推杆主体的长度方向上的中轴线w1位置之间的区域位置内,且设置触感件位于污水箱上沿推杆主体的长度方向上的中轴线w1位置与污水箱的后侧部位置之间的区域位置内。
16.前述的清洁机,触感件至污水腔的后侧部位置的距离小于等于触感件至污水箱上沿推杆主体的长度方向上的中轴线w1位置的距离;
17.或,污水腔的后侧部位置上设置有安装部且触感件安装于安装部上;
18.或,污水腔的顶部位置上靠近污水腔的后侧部位置的区域位置上设置有安装部且触感件安装于安装部上;
19.或,污水腔的顶部位置上设置有朝向下部方向伸出的凸部且凸部上靠近污水腔的后侧部位置的区域位置上设置有安装部并设置触感件安装于安装部上。
20.前述的清洁机,气流口的中心位置至污水腔的前侧部的距离小于等于气流口至污水箱上沿推杆主体的长度方向上的中轴线w1的距离;
21.或,将气流口设置为位于污水腔的顶部位置上靠近污水腔的前侧部位置的区域位置上;
22.或,污水腔的顶部位置上设置有朝向下部方向伸出的凸部且将气流口设置为位于凸部位置上靠近污水腔的前侧部位置的区域位置上。
23.前述的清洁机,设置污水箱上沿推杆主体的长度方向上的中轴线w1位于推杆主体在长度方向上的中轴线w2的前侧;
24.设置触感件位于污水腔的后侧部位置与中轴线w2之间的区域位置上或设置触感件至污水腔的后侧部位置的距离小于等于触感件至中轴线w2位置的距离。
25.前述的清洁机,当推杆主体相对地拖主体呈倾斜结构且污水腔内盛放有污水时,设置气流口的底部位置至污水液面的高度h3和/或触感件与污水腔的表面相交接的位置至污水液面的高度h4大于污水腔的顶部与污水腔的后侧部相交接的位置至污水液面的高度h5;
26.或,当推杆主体相对地拖主体呈倾斜结构且污水腔内盛放有污水时且当污水液面淹没到污水腔的顶部与污水腔的后侧部相交接的位置时则至少触感件的底部位置的一部分位于污水液面以下被污水淹没。
27.前述的清洁机,触感件设置为朝向污水腔方向呈伸出结构,触感件的数量设置为两个;
28.两个触感件设置为沿污水腔的前后方向呈间隔分布结构且当污水腔内盛放有污水时位于前侧的触感件的底部位置至污水液面的高度大于等于位于后侧的触感件的底部位置至污水液面的高度;
29.或,两个触感件设置为沿污水腔的左右方向呈间隔分布结构且当污水腔内盛放有污水时两个触感件的底部位置至污水液面的高度相等。
30.前述的清洁机,污水腔的上部设置有进污口或污水腔的顶部位置上设置有朝向下部方向伸出的凸部且凸部上设置有进污口,进污口设置为朝向污水腔方向来与污水腔呈相连通结构;
31.设置进污口位于气流口的后侧或设置进污口位于污水箱上沿推杆主体的长度方向上的中轴线w1位置与污水箱的后侧部位置之间的区域位置内。
32.前述的清洁机,地拖主体上设置有用于接触地面来进行清洁的滚筒;
33.滚筒设置为通过进污通道可与进污口呈相连通结构且滚筒与进污通道之间设置有过滤装置来构成滚筒上的污水经过过滤后进入到进污通道内的结构;
34.或,滚筒的一侧设置污水区来用于收集滚筒上的污水且设置滚筒可通过污水区来与进污口呈相连通结构,污水区内设置有过滤装置来构成滚筒上的污水经过过滤后进入到进污口的结构。
35.前述的清洁机,污水腔的上部设置有分腔件,分腔件的上部设置有呈环形结构的密封件,分腔件上设置有气流腔和进污腔,且气流腔和进污腔设置为相互独立的腔体结构,并设置气流腔与气流口呈相连通结构,以及设置进污腔与进污口呈相连通的结构。
36.前述的清洁机,推杆主体上设置有气流接口,气流接口设置为朝向推杆主体的侧部或上部方向呈敞开结构,且气流接口对应的设置为朝向推杆主体的侧部或上部方向呈贯通结构来构成与气流腔呈相连通的结构。
37.前述的清洁机,推杆主体上设置有污水接口,污水接口设置为朝向推杆主体的侧部或上部方向呈敞开结构,且污水接口对应的设置为朝向推杆主体的侧部或上部方向呈贯通结构来构成与进污腔呈相连通的结构;
38.污水接口还设置为可与地拖主体上设置的滚筒呈相连通的结构。
39.前述的清洁机,污水腔内设置有排污通道,排污通道的末端设置为靠近污水腔的底部位置,排污通道设置为朝向污水腔的上方延伸并穿过污水箱的顶部表面或侧部表面形成有排污口;
40.推杆主体上还设置有出污口,出污口朝向推杆主体的侧部方向或下部方向呈敞开结构来构成与推杆主体的外部呈相连通的结构;
41.且出污口与排污口之间设置有污水通道,污水通道上安装有排污模块。
42.前述的清洁机,排污模块包括触动件和排污件,触动件设置为位于排污件的外侧且设置为可运动的结构,排污件内设置有排污流道,当触动件运动来对排污件形成触动压接时构成触动件不接触排污流道或不接触排污流道内的污水的结构并形成将排污流道进行密封关闭的结构。
43.前述的清洁机,污水腔内还设置有防流件,防流件上设置有阻流部,阻流部至少构成对污水腔的截面的一部分形成遮蔽结构来阻挡污水,且阻流部位于污水腔的长度方向上的中部以上的区域位置上。
44.前述的清洁机,设置排污通道安装于防流件上,且防流件上还设置有可旋转的摆动件,至少排污通道的末端对应的位置安装于摆动件上使得摆动件可带动排污通道的末端对应的位置在竖直方向上进行上下摆动。
45.前述的清洁机,推杆主体上设置有安装腔,污水箱可拆卸地安装于安装腔上,且安装腔内设置有第一补能模块,污水箱上对应的设置有第二补能模块,当污水箱安装在位时
第一补能模块和第二补能模块对接来构成可进行补能的结构。
46.清洁机的控制方法,包括如前所述的清洁机,清洁机还包括控制单元和气流器,气流器直接或间接的与气流口相连通;
47.控制单元分别与触感模块和气流器电性相连;
48.还包括以下控制方法:
49.步骤s1:控制单元检测触感件与污水腔内的污水连续接触的时间值t,t为非空值,并将时间值t与控制单元内预设的时间阈值t0进行比较;
50.步骤s2:若检测到的时间值t小于时间阈值t0则控制气流器停止工作且停止工作的时间为t1,t1小于等于30或60秒,然后控制气流器重新启动工作并进入步骤s1;
51.步骤s2':若检测到的时间值t大于等于时间阈值t0则控制气流器停止工作并提示污水已满。
52.前述的清洁机的控制方法,设置t0大于等于10秒,或,设置t1大于等于5秒或设置t1大于等于5秒且小于t0。
53.清洁机的控制方法,包括如前所述的清洁机,清洁机还包括控制单元、供水机构和气流器,气流器直接或间接的与气流口相连通;
54.控制单元分别与触感模块、供水机构和气流器电性相连;
55.控制单元控制气流器启动工作并进入到以下控制方法:
56.步骤s01:控制供水机构启动工作;
57.步骤s02:控制单元设定有时间值t的检测周期,时间值t大于等于2秒;
58.在单个检测周期内若检测到触感件与污水腔内的污水接触则在该检测周期内控制供水机构停止工作;
59.且在单个检测周期内若检测到触感件与污水腔内的污水连续接触的时间值t1大于等于控制单元内预设的时间阈值t0则提示污水已满;
60.以及在单个检测周期内若检测到触感件与污水腔内的污水进行接触的累积接触的时间值t2大于等于时间值t的0.5倍则提示污水已满。
61.前述的清洁机的控制方法,还包括步骤s03:若步骤s02中未提示污水已满则进入步骤s01。
62.与现有技术相比,本发明具有如下有益效果:
63.本方案中,通过设置气流口和触感模块的位置限定,并结合推杆主体呈倾斜结构时的位置限定,来确保触感模块可以来有效的预先检测污水的液面,可以有效的防止因污水箱呈倾斜结构时出现污水淹没气流口,甚至出现污水进入气流口内出现进入到气流器内导致气流器损坏,本方案实现提供清洁机工作吸取污水的安全性和可靠性。
64.本方案通过触感模块来实现对污水的液面进行检测判断,并结合推杆主体的倾斜角度来结合设置触感模块与气流口的位置关系及限定结构,实现触感模块来稳定的预先检测污水的液面是否会引起淹没气流口,进而提前控制气流器的工作状态,防止污水淹没气流口,提升清洁机整体的稳定性和安全性,以及污水箱来收集污水的可靠性。
65.本方案主要将触感模块设置为位于气流口的后侧,且设置为沿推杆主体倾斜方向来形成位于后侧,实现当推杆主体在倾斜时,气流口到污水液面的距离大,触感件到污水液面的距离小,并结合位置分布限定来实现触感模块可以预先检测液面,防止污水淹没到气
流口,确保气流口不会进污水,以便清洁机可以安全地来吸取污水收集。
66.本方案的结构,可以实现气流器来稳定地对滚筒上的污水进行吸取,同时气流器与污水腔对接的结构设置,如气流接口、气流腔等结构来进一步地实现防止污水进入到气流器内,形成对气流器的多层保护效果,及时因意外出现污水溅入到气流口内也不会出现污水进入到气流器,进一步提升气流器工作的安全性和稳定性。
67.本方案的结构,可以实现来稳定地对接气流的供给实现吸取污水,同时可以稳定来实现污水对接进入到污水腔内收集,同时可以来对污水腔内的污水进行向外的对接排放,提升用户来对污水箱进行维护的便捷性,提升用户的使用体验效果。
68.本方案的结构中,如分腔件等结构,实现吸取污水收集和气流供给的分腔独立结构,防止气流的分散,且防止污水在收集中的分散,实现气流稳定地来对污水进行吸取收集到污水箱内,同时可以防止因污水分散导致污水容易被吸入进入到气流口内的问题发生。
69.本方案中,针对污水箱内的污水进行排放来设置排污模块,排污模块可以来实现稳定地、有效地来排放污水,排放污水的过程中不容易出现堵塞的问题,同时当关闭不进行排放污水时,不容易出现泄漏气流的问题,使得清洁机来工作的稳定性和可靠性更高。
70.排污模块的整体结构简单,通过设置排污件和触动件来实现排污件开闭效果,同时触动件不会与污水接触,使得排污件可以独立的来用于污水的通过,触动件不接触污水则不容易出现沾染污水或垃圾,且不容易出现因接触污水形成挤压垃圾导致堵塞问题和可靠性降低的问题。
71.本方案的触动件可以稳定地来形成对排污件的压接实现关闭效果,和不压接实现打开效果,触动件位于外侧来独立的进行对排污件开闭效果,实现污水在排污件内进行独立的流动,不会对触动件形成污染影响,有利于排污件整体上保持较好的通道流动效果,提升排污的能力和可靠性。
72.本方案的触动件和排污件的结构,可以实现来稳定地开闭效果,同时触动件来对排污件进行压接的过程中可以有效的来将污水中的垃圾推开,实现触动件来稳定压接排污件形成关闭,不容易出现泄漏气流的问题。
73.本方案的污水箱的整体结构来可以实现防止污水集聚,特别是防止在推杆主体在呈倾斜结构时出现污水晃动或集聚流动到气流口位置,在污水腔内设置防流件,实现对污水的阻挡效果,有效的防止出现污水集聚到气流口的问题,有效的防止污水淹没气流口出现气流器损坏的问题。
74.本方案的清洁机的整体结构简单,且来对污水进行吸取收集的安全性和可靠性更高,可以有效的来吸取收集污水,且有效的防止污水进入到气流器内。
附图说明
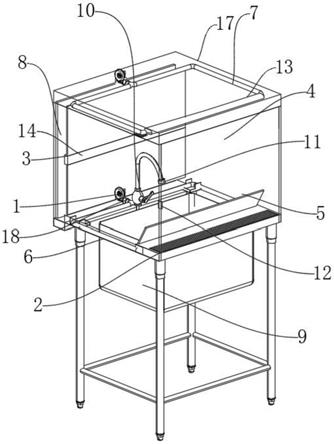
75.图1为清洁机的立体示意图;
76.图2为清洁机的剖面结构示意及推杆主体呈倾斜的示意图;
77.图3为图2中y处的局部放大示意图;
78.图4为清洁机的结构示意图;
79.图5为图4中x处的局部放大示意图;
80.图6为清洁机的立体示意及污水箱的内部示意图;
81.图7为图6中z处的局部放大示意图;
82.图8为清洁机的内部结构示意图;
83.图9为图8中g处的局部放大示意图;
84.图10为电性连接示意图;
85.附图标记:1-清洁机,10-推杆主体,101-污水箱,1011-污水腔,10111-气流口,10112-防流件,101121-阻流部,101122-摆动件,10113-凸部,10114-进污口,10115-分腔件,101151-气流腔,101152-进污腔,10116-密封件,10117-排污通道,101171-排污口,10118-排污模块,101181-触动件,101182-排污件,1011821-排污流道,1012-触感模块,10121-触感件,1013-安装部,102-气流接口,103-污水接口,104-安装腔,105-出污口,11-地拖主体,111-滚筒,12-控制单元,13-气流器。
具体实施方式
86.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例,进一步阐述本发明。
87.实施例:本发明的清洁机及其控制方法,如图1至图10构成所示,清洁机1主要用于在地面上移动来对地面进行清洁,可以来进行拖地清洁处理,也可以来进行洗地清洁处理,同时在清洁处理的过程中将形成的污水进行及时时候,防止污水对地面的二次污染,同时方便用户来对污水进行维护处理。
88.本方案的清洁机1,包括推杆主体10和地拖主体11,推杆主体10可旋转的安装于地拖主体11上,设置推杆主体10相对地拖主体11进行旋转来呈倾斜结构的朝向方向为后侧方向,对应的相反一侧方向为前侧方向,用户可以手持推杆主体10来带动地拖主体11在地面上移动来对地面进行清洁处理,用户手持推杆主体10相对地拖主体11旋转来适用用户对室内地面的清洁需求,如室内的桌子下部的底部或沙发底部的地面等相对较矮的空间区域对应的地面位置,以便更好的满足用户的使用需求,其中推杆主体10相对地拖主体11进行旋转来呈倾斜结构的朝向方向为后侧方向且对应的相反一侧方向为前侧方向,即为用户通过旋转推杆主体10来进行手持后推动清洁机1前进的方向为前侧方向,与前侧相反的方向为后侧方向,用户通过对推杆主体10朝向后侧方向旋转进而方便用户来通过推杆主体10带动地拖主体11在地面上朝向前侧方向移动来实现对地面的清洁处理效果。
89.具体地,推杆主体10上安装有污水箱101,污水箱101用于盛放收集污水,污水箱101内设置有污水腔1011,污水腔1011的上部设置有触感模块1012,触感模块1012来对污水腔1011内的污水进行接触检测判断,主要对污水腔1011内的污水液面进行检测,同时,本方案的污水腔1011的上部设置有气流口10111,气流口10111主要用于气流的通过来对污水腔1011内进行产生气流的吸力,以便来实现收集污水到污水腔1011内,气流口10111可以设置为与气流器13相连,气流器13主要来产生气流的吸力实现对污水的吸取收集,本方案设置的触感模块1012可以有效地来对污水进行检测,以便防止污水淹没气流口10111或进入到气流口10111导致引起污水损坏清洁机1,其中,触感模块1012至少包括触感件10121,至少触感件10121的一部分设置为位于污水腔1011内来使得当推杆主体10相对地拖主体11旋转形成倾斜角度a且污水腔1011内的污水液面朝向上方至气流口10111的最底部位置的距离为h0时构成至少触感件10121的一部分位于污水液面以下,当推杆主体10相对地拖主体11
旋转来形成倾斜角度a时且污水腔1011内盛放有污水并形成污水液面朝向上方至气流口10111的最底部位置的距离为h0时来构成有触感件10121位于污水液面以下,即为被污水淹没,此时触感件10121可以来对通过接触污水实现对污水的检测判断,防止污水淹没气流口10111导致出现污水进入到气流口10111的问题。
90.本方案通过限定当推杆主体10呈倾斜结构时,且气流口10111位于污水液面的上方时,至少能够形成触感件10121的一部分位于污水液面以下,即为构成气流口10111不被污水淹没而触感件10121的一部分被污水淹没的结构,并形成当触感件10121检测到污水的液面时气流口10111是位于污水液面的上方,确保污水不会淹没到气流口10111位置,实现气流口10111可以稳定的来用于气流的通过,且防止污水进入到气流口10111导致损坏清洁机1的问题发生,主要触感件10121的底部位置位于污水液面以下来构成对污水液面的检测,防止污水淹没到气流口10111,有效提升清洁机1在推杆主体10倾斜时来稳定地对地面进行清洁处理,同时确保用户操作清洁机1工作的安全性。
91.其中,本方案中设置污水箱101沿推杆主体10的长度方向上来构成的污水腔1011的长度为h,即为污水箱101内的污水腔1011的长度为h,可以为污水腔1011的顶部至污水腔1011的底部的距离,且设置0<h0≤h/2来使得气流口10111位于污水液面的上方,即为当气流口10111位于污水液面的上方时且当推杆主体10相对地拖主体11旋转形成倾斜角度a时可以构成有触感件10121的一部分来接触污水的液面的结构,即为形成触感件10121的底部位置的一部分被污水淹没而气流口10111不被污水淹没的结构,防止污水进入到气流口10111导致损坏清洁机1的问题发生。
92.和/或,其中,设置角度a为大于90度且小于180度,即为拖杆主体相对地拖主体11形成该范围内的角度时,可以实现构成有触感件10121的一部分来接触污水的液面的结构且气流口10111不被污水淹没的结构,进而可以有效的实现防止污水淹没或进入到气流口10111的问题发生;优选地,设置角度a为大于等于150度且小于等于170度,即为拖杆主体相对地拖主体11形成该范围内的角度时,可以实现构成有触感件10121的一部分来接触污水的液面的结构且气流口10111不被污水淹没的结构,此时推杆主体10相对地拖主体11的倾斜角度较大且污水容易晃动翻涌,通过触动件101181来形成对污水液面的检测可以在该角度范围内有效的防止污水淹没或进入到气流口10111,确保污水不会进入到气流口10111引起损坏。
93.本方案的气流口10111和触感件10121与污水液面之间的结构位置限定,实现触感件10121及时预先来对污水腔1011内的污水液面进行检测判断,防止污水进入到气流口10111内引起清洁机1损坏,提升清洁机1工作的安全性和可靠性。
94.针对气流口10111和触感件10121的结构部分,本方案的气流口10111设置为可朝向污水腔1011方向来与污水腔1011呈相连通的结构,以便气流口10111来与污水腔1011之间形成相连通实现气流的通过,实现来对污水进行吸取到污水箱101内收集,同时,设置触感件10121位于气流口10111的后侧或设置触感件10121的后侧部位置至污水腔1011的后侧部位置的距离h1小于等于气流口10111的后侧部位置至污水腔1011的后侧部位置的距离h2,通过设置限定触感件10121与气流口10111的位置分布,实现当拖杆主体相对地拖主体11呈倾斜结构时,此时可以实现触感件10121来预先在竖直方向上来对污水的液面进行检测判断,气流口10111位于前侧可以来有效的降低污水在晃动或在污水箱101倾斜时污水淹
没气流口10111的风险,同时触感件10121位于后侧来提高触感件10121对污水液面进行预先检测的效果,实现有效的防止污水淹没气流口10111,杜绝污水进入到气流口10111引起气流器13损坏的问题发生。
95.本方案中,将触感件10121与气流口10111设置为呈并列间隔分布的结构使得当推杆主体10相对地拖主体11旋转形成倾斜角度a时可构成污水腔1011内的污水液面至少淹没触感件10121的一部分且污水腔1011内的污水液面不淹没气流口10111,触感件10121与气流口10111主要在前侧方向上来形成并列间隔分布的结构,实现提升触感件10121位于气流口10111的后侧位置来对污水液面的预先检测判断,实现当推杆主体10呈倾斜结构时触感件10121的底部位置到污水液面的距离小于气流口10111的底部位置到污水液面的距离,污水液液面会先淹没触感件10121来实现触发信号,此时可以控制气流器13停止工作来防止污水进入到气流口10111内,提升清洁机1工作的安全性,且能够更好的适应用户的使用需求。
96.本方案中,针对气流口10111与触感件10121的位置部分,设置气流口10111位于污水箱101的前侧部位置与污水箱101上沿推杆主体10的长度方向上的中轴线w1位置之间的区域位置内,且设置触感件10121位于污水箱101上沿推杆主体10的长度方向上的中轴线w1位置与污水箱101的后侧部位置之间的区域位置内,形成在污水箱101上的长度方向上的中轴线w1的分割下来构成污水箱101的前部区域和后部区域,前部区域即为污水箱101的前侧部位置与中轴线w1之间的区域位置,后部区域即为污水箱101的后侧部位置与中轴线w1之间的区域位置,并来设置构成气流口10111位于前部区域,触感件10121位于后部区域,实现气流口10111位于触感件10121的前侧,进而形成触感件10121来预先在竖直方向上来对污水的液面进行检测判断,气流口10111位于前侧可以来有效的降低污水在晃动或在污水箱101倾斜时污水淹没气流口10111的风险,有效确保气流口10111处于污水液面的上方。
97.本方案中,污水腔1011内的污水液面即为污水腔1011内的污水液位,即为污水在污水腔1011内的最高液面位置。
98.针对触感件10121在污水腔1011内的位置结构部分,本方案中,设置触感件10121至污水腔1011的后侧部位置的距离小于等于触感件10121至污水箱101上沿推杆主体10的长度方向上的中轴线w1位置的距离,即为实现触感件10121相对靠近污水腔1011的后侧部位置来实现对污水液面的预先检测判断,提升触感件10121来对污水的液面进行预先检测的有效性。
99.或,针对触感件10121在污水腔1011内的位置结构部分,本方案中,污水腔1011的后侧部位置上设置有安装部1013且触感件10121安装于安装部1013上,将触感件10121安装在污水腔1011的后侧部位置上,此时形成触感件10121可以有效的来预先检测污水的液面,当推杆主体10倾斜时污水逐渐淹没污水腔1011的后侧部位置可以形成随液面上升来及时淹没到触感件10121进而形成对触感件10121的淹没触发,提升触感件10121来对污水的液面进行预先检测的有效性。
100.其中,安装部1013可以为圆柱形的套柱结构来实现将触感件10121安装在内,触感件10121对应设置圆柱形结构或片状结构来实现套接或插接安装。
101.或,针对触感件10121在污水腔1011内的位置结构部分,本方案中,污水腔1011的顶部位置上靠近污水腔1011的后侧部位置的区域位置上设置有安装部1013且触感件10121
安装于安装部1013上,此时触感件10121的位置可以相对靠近污水腔1011的后侧部位置,将触感件10121安装在污水腔1011的顶部位置上以便构成触感件10121来向下伸出来对污水进行预先检测的结构,且能够提升触感件10121来对污水的液面进行预先检测的有效性。
102.或,针对触感件10121在污水腔1011内的位置结构部分,本方案中,污水腔1011的顶部位置上设置有朝向下部方向伸出的凸部10113且凸部10113上靠近污水腔1011的后侧部位置的区域位置上设置有安装部1013并设置触感件10121安装于安装部1013上,在污水腔1011内设置凸部10113,凸部10113上对应设置安装部1013,将触感件10121来安装在凸部10113上有利于来形成一定的导流效果,当污水接触到凸部10113时以便污水能够及时被导流向下形成回落,同时触感件10121也可以来形成对污水的液面进行预先检测的结构,气流口10111与触感件10121的结构可以有效的实现触感件10121来预先检测污水液面且可以有效防止气流口10111被污水淹没。
103.针对气流口10111的结构部分,本方案中,气流口10111的中心位置至污水腔1011的前侧部的距离小于等于气流口10111至污水箱101上沿推杆主体10的长度方向上的中轴线w1的距离,实现气流口10111相对靠近污水腔1011的前侧部位置来实现气流口10111远离触感件10121,以便有效的防止污水进入到气流口10111。
104.或,针对气流口10111的结构部分,本方案中,将气流口10111设置为位于污水腔1011的顶部位置上靠近污水腔1011的前侧部位置的区域位置上,同时将气流口10111设置位于污水腔1011的顶部位置上能够形成对污水的更好的远离效果,防止污水晃动或倾斜来接触到气流口10111,实现气流口10111相对靠近污水腔1011的前侧部位置来实现气流口10111远离触感件10121,以便有效的防止污水进入到气流口10111。
105.或,针对气流口10111的结构部分,本方案中,污水腔1011的顶部位置上设置有朝向下部方向伸出的凸部10113且将气流口10111设置为位于凸部10113位置上靠近污水腔1011的前侧部位置的区域位置上,在污水腔1011内设置凸部10113并将气流口10111设置在凸部10113上,以便气流口10111来朝向下部和/或侧部方向来形成与污水腔1011呈相通的结构,能够更好的引导气流从污水腔1011进入到气流口10111内,同时设置气流口10111相对靠近污水腔1011的前侧部位置,防止污水晃动或倾斜来接触到气流口10111,实现气流口10111相对靠近污水腔1011的前侧部位置来实现气流口10111远离触感件10121,以便有效的防止污水进入到气流口10111。
106.可选地,本方案的气流口10111的数量可以设置为多个,多个气流口10111来形成集中产生气流来对污水进行吸取到污水腔1011内收集。多个气流口10111可以设置为呈间隔分布结构。
107.本方案中,为了提升用户在操作推杆主体10时的轻便度,本方案设置污水箱101上沿推杆主体10的长度方向上的中轴线w1位于推杆主体10在长度方向上的中轴线w2的前侧,可以有效的降低用户手持推杆主体10时的强度,提升用户操作使用的轻便度,其中,针对触感件10121的位置结构部分,本方案设置触感件10121位于污水腔1011的后侧部位置与中轴线w2之间的区域位置上或设置触感件10121至污水腔1011的后侧部位置的距离小于等于触感件10121至中轴线w2位置的距离,即为,触感件10121的位置设置在污水箱101的后侧部与中轴线w1的前提下来进一步限定触感件10121的位置位于污水箱101的后侧部位置与中轴线w2之间的区域位置内,以便触感件10121相对靠近污水箱101的后侧部位置或者相对远离
气流口10111位置,或者通过设置触感件10121至污水腔1011的后侧部位置的距离小于等于触感件10121至中轴线w2位置的距离来将触感件10121设置为相对靠近污水箱101的后侧部位置,均可实现触感件10121来有效的预先检测污水,防止污水接触到气流口10111或进入到气流口10111,有效的提升触感件10121来对污水进行检测的可靠性。
108.本方案中,针对气流口10111和触感件10121的位置结构部分,当推杆主体10相对地拖主体11呈倾斜结构且污水腔1011内盛放有污水时,设置气流口10111的底部位置至污水液面的高度h3和/或触感件10121与污水腔1011的表面相交接的位置至污水液面的高度h4大于污水腔1011的顶部与污水腔1011的后侧部相交接的位置至污水液面的高度h5,通过设置实现气流口10111的底部位置、触感件10121与污水腔1011的表面相交接的位置均位于污水腔1011的顶部与污水腔1011的后侧部相交接的位置的上方,实现触感件10121可以来预先对污水液面进行检测,防止污水淹没到气流口10111。
109.可选地,可以设置当推杆主体10相对地拖主体11呈倾斜结构且污水腔1011内盛放有污水时,若污水液面淹没到污水腔1011的顶部与污水腔1011的后侧部相交接的位置则此时至少触感件10121的底部位置的一部分位于污水液面以下被污水淹没,此时可以有效的来实现触感件10121预先对污水液面进行检测,防止污水淹没到气流口10111,有效的防止污水液面淹没到污水腔1011的顶部与污水腔1011的后侧部相交接的位置的上方来导致污水会集聚翻涌容易进入到气流口10111内的问题发生,确保气流口10111不会被污水淹没到。
110.本方案的触感模块1012的结构部分,主要为触感件10121设置为朝向污水腔1011方向呈伸出结构,触感件10121的数量设置为两个,当两个触感件10121均接触到污水时则会触发触感模块1012的信号来形成检测到污水的信号,其中,可以为两个触感件10121设置为沿污水腔1011的前后方向呈间隔分布结构且当污水腔1011内盛放有污水时位于前侧的触感件10121的底部位置至污水液面的高度大于等于位于后侧的触感件10121的底部位置至污水液面的高度,此时前后分布结构的两个触感件10121更能够较为准确的来检测出污水的液面,因当污水晃动或倾斜时此时容易出现污水翻涌来间歇的接触后侧位置的触感件10121,因此单个触感件10121并不能准确的检测出污水的液面位置,当设置两个触感件10121来均接触到污水的液面时可以更准确的判断出污水的液面,提升触感件10121对液面检测的可靠性和稳定性。
111.或,本方案的触感模块1012的结构部分,主要为触感件10121设置为朝向污水腔1011方向呈伸出结构,触感件10121的数量设置为两个,当两个触感件10121均接触到污水时则会触发触感模块1012的信号来形成检测到污水的信号,其中,两个触感件10121设置为沿污水腔1011的左右方向呈间隔分布结构且当污水腔1011内盛放有污水时两个触感件10121的底部位置至污水液面的高度相等,左右分布的两个触感件10121能够更准确的来检测出污水的液面,因污水腔1011内的污水容易存在晃动或倾斜的状态,污水容易翻涌来间歇的接触到触感件10121,因此单个触感件10121并不能准确的检测出污水的液面位置,当设置两个触感件10121来均接触到污水的液面时可以更准确的判断出污水的液面,提升触感件10121对液面检测的可靠性和稳定性。
112.针对污水箱101来收集污水的结构部分,本方案在污水腔1011的上部设置有进污口10114或污水腔1011的顶部位置上设置有朝向下部方向伸出的凸部10113且凸部10113上
设置有进污口10114,进污口10114设置为朝向污水腔1011方向来与污水腔1011呈相连通结构,通过设置进污口10114来实现污水进入到污水腔1011内收集,主要为当污水箱101安装在位时实现来与推杆主体10进行对接来用于收集污水到污水腔1011内,以便污水对地面形成二次污染;为了进一步防止污水在进入到污水腔1011内的过程中出现污水被吸取到气流口10111内的问题发生,本方案设置进污口10114位于气流口10111的后侧或设置进污口10114位于污水箱101上沿推杆主体10的长度方向上的中轴线w1位置与污水箱101的后侧部位置之间的区域位置内,将进污口10114设置为位于气流口10111的后侧来实现污水的进入,进污口10114与气流口10111呈前后间隔分布的结构来防止污水在进入到污水腔1011内时出现被气流吸入到气流口10111内,有利于污水集中来进入到污水腔1011内,还可以将进污口10114位于污水箱101上沿推杆主体10的长度方向上的中轴线w1位置与污水箱101的后侧部位置之间的区域位置内以便污水箱101来位于中轴线w1的后侧位置上来用于污水的进入,实现气流口10111与进污口10114之间有较大的前后间隔距离,有效的防止污水进入到气流口10111内引起气流器13损坏。
113.本方案中,针对清洁机1对地面清洁的结构部分及污水部分,在地拖主体11上设置有用于接触地面来进行清洁的滚筒111,地拖主体11上还设置清水供给结构来对滚筒111供给清水,清水供给结构包括供水机构,供水机构可以设置为水泵、电磁泵或电磁阀来实现对滚筒111供给清水的效果,滚筒111在接触清水后形成湿润的结构来对地面进行清洁处理,同时在滚筒111清洁的过程中会形成较多的污水,此时可以来将污水收集到污水腔1011内,主要通过气流器13工作产生的气流的吸力来将污水吸取收集到污水腔1011内进行收集,其中,滚筒111设置为通过进污通道可与进污口10114呈相连通结构且滚筒111与进污通道之间设置有过滤装置来构成滚筒111上的污水经过过滤后进入到进污通道内的结构,滚筒111上的污水在气流的吸力的作用下进入到进污通道内并经过过滤装置的过滤来实现进入到污水腔1011内,防止污水在收集的过程中出现堵塞的问题,实现在污水进入到进污通道之前先对污水进行有效的过滤处理后再进入到进污通道内并进入到污水腔1011内,提升对污水收集的可靠性,不容易出现堵塞的问题。
114.或,针对污水的收集结构部分,在滚筒111的一侧设置污水区来用于收集滚筒111上的污水且设置滚筒111可通过污水区来与进污口10114呈相连通结构,污水区位于滚筒111的一侧来预先收集滚筒111上的污水,可以设置压接件来将滚筒111上的污水挤压出,挤压出的污水在重力下流动进入到污水区内,此时污水会在污水区内形成一定的集聚效果,为了防止污水在被收集的过程中出现堵塞的问题,本方案在污水区内设置有过滤装置来构成滚筒111上的污水经过过滤后进入到进污口10114的结构,实现污水在污水区内先进行过滤处理,过滤后的污水再进入到进污口10114并进入到污水腔1011内实现污水的收集,可以提升对污水收集的可靠性,不容易出现堵塞的问题。
115.可选地,上述方案中,过滤装置可以包括过滤件,过滤件上设置多个过滤孔,进而实现对污水的过滤效果。
116.可选地,滚筒111设置为柱形结构,滚筒111的数量可以根据需要来设置,滚筒111的外层设置软性的布材质或海绵材质构成,实现接触地面来清洁处理的效果。
117.其中,在地拖主体11上设置驱动机构、电机,电机通过驱动结构来实现带动滚筒111进行旋转滚动运动的结构,以便滚筒111来接触地面进行清洁处理,驱动机构可以设置
为皮带轮进行传动的结构,也可以设置为多个齿轮或行星齿轮来传动的结构,以便对电机的旋转速度来进行适当的减速,形成减速后来带动滚筒111旋转滚动。
118.针对污水箱101上气流的通道和污水进入的通道的结构设置,本方案在污水腔1011的上部设置有分腔件10115,分腔件10115的上部设置有呈环形结构的密封件10116,当污水箱101安装在位时密封件10116实现污水箱101与推杆主体10之间的对接密封效果,其中,分腔件10115上设置有气流腔101151和进污腔101152,且气流腔101151和进污腔101152设置为相互独立的腔体结构,实现气流和污水能独立的在独立的腔体内呈分割状态来分别与污水腔1011相连通,并设置气流腔101151与气流口10111呈相连通结构,实现气流从气流口10111内独立的进入到气流腔101151内并进入到气流器13内,以及设置进污腔101152与进污口10114呈相连通的结构,实现污水独立的进入到进污腔101152内后再通过进污口10114进入到污水腔1011内,实现污水和气流有独立的腔体来分别与污水腔1011呈相连通结构,可以有效的防止污水在进入到污水腔1011内的时候出现污水被吸取进入到气流口10111内,同时气流腔101151可以实现对气流的集聚效果,防止气流的扩散,实现稳定地来产生气流对污水进行吸取,且可以有效的防止污水在进入到污水腔1011内的过程中出现污水被气流吸取到气流口10111内的问题发生。
119.针对气流通道的结构部分,推杆主体10上设置有气流接口102,气流接口102设置为朝向推杆主体10的侧部或上部方向呈敞开结构,气流口10111的结构有利于防止污水倒流进入到气流接口102内,及时出现污水因意外进入到气流口10111内也可以有效的防止污水进入到气流接口102内,且气流接口102对应的设置为朝向推杆主体10的侧部或上部方向呈贯通结构来构成与气流腔101151呈相连通的结构,气流结构在贯通的过程中形成气流通道,气流通道结构可以有效的防止污水进入,提升气流稳定供给的通道结构,气流接口102主要与气流器13相连通来用于气流的通过,当气流器13工作时,污水腔1011的气流通过气流口10111进入到气流接口102并回到气流器13内后排出,使得污水腔1011内产生负压的吸力来对滚筒111上的污水进行吸取,实现将污水吸取收集到污水腔1011内收集,且气流通道的结构部分及气流接口102的部分不容易出现污水倒流进入的问题。
120.针对污水的结构部分,推杆主体10上设置有污水接口103,污水接口103主要来用于污水的进入到污水腔1011内收集,污水接口103设置为朝向推杆主体10的侧部或上部方向呈敞开结构,且污水接口103对应的设置为朝向推杆主体10的侧部或上部方向呈贯通结构来构成与进污腔101152呈相连通的结构,同时污水接口103还与滚筒111呈相连通结构,可以与进污通道或污水区呈相连通结构来用于滚筒111上形成的污水进入到污水腔1011内,污水接口103的结构有利于污水通过污水接口103后在重力的作用下进入到污水腔1011内,实现对污水的有效收集,同时还可以有效的防止当推杆主体10呈倾斜结构时污水倒流的问题,防止污水倒流进入。
121.具体地,污水接口103还设置为可与地拖主体11上设置的滚筒111呈相连通的结构,可以与进污通道或与污水区呈相连通结构,并通过进污通道或污水区来对应的与滚筒111呈相连通结构,实现将滚筒111上的污水吸取进入到污水腔1011内,将污水进行吸取收集可以有效的防止污水对地面的二次污染,提升滚筒111对地面的清洁效果。
122.本方案中,在推杆主体10上主要设置气流器13来产生气流,气流器13主要来实现产生气流的吸力,主要来形成对污水箱101内产生气流的吸力,以便通过气流器13来形成对
滚筒111上的污水进行吸取,将滚筒111上的污水吸取进入到污水箱101内收集,实现将污水集中收集到污水腔1011内。
123.可选地,气流器13可以设置为具有大吸力的风机结构,或设置为真空泵结构。
124.本方案的清洁机1可以来实现将污水箱101内的污水进行向外排出,以方便来对清洁机1进行对接维护处理污水,具体地,在污水腔1011内设置有排污通道10117,排污通道10117主要来用于污水腔1011内的污水的通过,排污通道10117的末端设置为靠近污水腔1011的底部位置以便污水腔1011内的污水可以有效的进入到排污通道10117内,排污通道10117设置为朝向污水腔1011的上方延伸并穿过污水箱101的顶部表面或侧部表面形成有排污口101171,实现污水腔1011内的污水在动力作用下可以进入到排污通道10117内,并通过排污通道10117来流动通过排污口101171实现将污水排出到污水箱101的外部,通过将排污口101171设置为位于污水箱101的顶部表面或侧部表面上来方便污水箱101进行安装对接后形成污水流动的通道,以便较好的对接来实现将污水腔1011内的污水进行移送到污水箱101的外部,其中,推杆主体10上还设置有出污口105,出污口105朝向推杆主体10的侧部方向或下部方向呈敞开结构来构成与推杆主体10的外部呈相连通的结构,出污口105来用于与清洁机1的外部进行对接以便将污水腔1011内的污水进行排出,如来设置基站对清洁机1进行维护处理,此时清洁机1可以通过出污口105来实现与基站进行对接以便污水腔1011内的污水通过出污口105进入到基站内收集,实现对接收集污水的效果,且出污口105与排污口101171之间设置有污水通道,污水通道来实现将出污口105与排污口101171和污水腔1011内形成污水可以通过的连通通道结构,污水腔1011内的污水可以在动力作用下来进行流动最终通过出污口105来向外排出,同时,本方案在污水通道上安装有排污模块10118,通过设置排污模块10118来实现稳定地、有效地来排放污水,排放污水的过程中不容易出现堵塞的问题,同时当关闭不进行排放污水时,不容易出现泄漏气流的问题,使得清洁机1来工作的稳定性和可靠性更高。
125.本方案中,主要设置排污模块10118来实现将污水箱101内的污水进行向外排出,排污模块10118的结构部分,排污模块10118包括触动件101181和排污件101182,触动件101181设置为位于排污件101182的外侧且设置为可运动的结构,排污件101182内设置有排污流道1011821,当触动件101181运动来对排污件101182形成触动压接时构成触动件101181不接触排污流道1011821或不接触排污流道1011821内的污水的结构并形成将排污流道1011821进行密封关闭的结构,主要通过触动件101181的运动来实现对排污件101182的压接,当触动件101181运动来形成对排污件101182的压接效果时此时使得排污件101182内的排污流道1011821被密封关闭,同时触动件101181对排污件101182进行压接的过程中不会接触到排污流道1011821,也不会接触到污水,可以有效的防止污水到触动件101181的污染,同时可以有效的防止因触动件101181接触污染导致垃圾积聚引起的堵塞的问题发生,当触动件101181不对排污件101182进行压接时此时排污件101182处于正常的状态来形成排污流道1011821呈打开状态,排污流道1011821可以来进行正常的用于污水的通过进而实现排放污水。
126.其中,触动件101181设置为可相对排污件101182在第一位置和第二位置之间运动,触动件101181主要为排污件101182的外侧位置来进行运动,实现当触动件101181位于第一位置时排污流道1011821呈打开结构,此时触动件101181不对排污件101182进行压接,
排污流道1011821可以正常用于污水的通过,当触动件101181位于第二位置时触动件101181构成对排污件101182的压接结构使得排污流道1011821呈关闭结构,通过触动件101181的运动来实现对排污流道1011821的开闭效果,进而实现当需要对污水箱101内进行排放污水则控制排污流道1011821呈打开状态来排放污水,当需要来收集污水到污水箱101内时则可以控制排污流道1011821呈关闭结构来形成密封关闭不泄露气流,本方案的排污模块10118的结构简单,通过设置排污件101182和触动件101181来实现排污件101182内的排污流道1011821的开闭效果,同时触动件101181不会与污水接触,使得排污件101182可以独立的来用于污水的通过,触动件101181不接触污水则不容易出现沾染污水或垃圾,且不容易出现因接触污水形成挤压垃圾导致堵塞问题和可靠性降低的问题。
127.可选地,触动件101181可以设置为平移移动的运动结构,或设置为可旋转摆动的运动结构,还可以设置为可伸缩变形的运动结构,可以根据需要来设定触动件101181的运动只需要满足能够对排污件101182形成压接的结构即可。
128.可选地,可以将排污件101182设置为呈软性可变形的结构,以便触动件101181来对排污件101182进行压接时排污件101182可以进行变形实现将排污流道1011821进行密封关闭,同时当触动件101181不压接排污件101182时此时排污件101182可以在自身的回弹力的作用下进行恢复使得排污流道1011821呈打开结构,即可实现触动件101181通过运动的方式来对排污件101182实现排污流道1011821的开闭效果。
129.针对触动件101181的运动结构部分,可以对应的设置电机,电机可以安装在电机支架上,电机支架安装在排污模块10118的外壳上,电机轴上连接传动件,传动件可以来实现带动触动件101181的移动或旋转,如电机通过正反转来实现带动触动件101181来往复的来回平移移动的效果,如电机正反转来实现带动触动件101181进行一定角度范围内的旋转摆动效果,触动件101181移动或摆动来实现对排污件101182的压接效果,进而实现对排污流道1011821的开闭效果。
130.还可以将触动件101181设置为可伸缩变形的运动结构,可以来设置气缸形成对触动件101181的带动来实现伸缩的变形效果,触动件101181伸缩变形来实现对排污件101182的压接效果,如当触动件101181伸出时可以来对排污件101182进行压接,当触动件101181缩回时形成不压接排污件101182的结构;又或者将触动件101181设置为可以用气泵灌入空气的结构,当气泵对触动件101181来灌入空气时实现触动件101181伸展变形以便触动件101181来对排污件101182进行压接,当触动件101181内的其他被抽出时实现触动件101181缩小变形形成触动件101181无法来对排污件101182进行压接,也可以实现触动件101181来对排污件101182进行压接和不压接的效果,进而实现排污流道1011821的开闭效果。
131.为了进一步提升排污模块10118来排放污水的效果和不排放污水的密封效果,本方案还可以设置触动件101181上设置压接部来对排污件101182进行压接,压接部上至少设置有一个退压部,退压部设置为相对压接部上朝向排污件101182方向的外端面呈远离排污件101182方向来构成凹陷结构,当触动件101181位于第二位置时退压部在排污件101182上对应的位置形成有容污部且压接部上的退压部之外的部位在排污件101182上对应的位置上形成有截流部,截流部实现对排污流道1011821的密封关闭效果,退压部的结构可以实现在排污件101182上进行压接时的行程相对较近,此时退压部的位置无法在排污件101182上形成截流部,退压部在排污件101182上形成容污部,此时当排污流道1011821内有垃圾时垃
圾在压接部的压接下进行一定的挤压来使得垃圾移动到容污部位置,防止压接部来对垃圾进行挤压导致截流部对排污流道1011821的密封效果差的问题,实现截流部来稳定地密封排污流道1011821形成关闭效果。
132.为了进一步提升排污模块10118来排放污水的效果和不排放污水的密封效果,本方案还可以设置设置排污件101182的杨氏模量小于10gpa,排污件101182可以设置为由软性的硅胶材质构成,但是构成的排污件101182需满足杨氏模量小于10gpa,以确保排污件101182能长时间进行正常的回弹效果,以便触动件101181来对排污件101182进行多次的压接进而实现排污流道1011821的开闭效果;或在排污件101182的外侧设置回弹层或弹力件,回弹层或弹力件可以来实现更好的带动排污件101182进行恢复进行回弹来使得当触动件101181不对排污件101182进行压接时排污件101182可以进行有效的回弹恢复以便排污流道1011821呈打开结构,提升排污流道1011821进行稳定打开的结构。
133.为了实现对污水箱101内的污水形成防流来防止推杆主体10在倾斜时出现污水集聚朝向气流口10111方向导致污水进入到气流口10111进而导致风机损坏,本方案的污水腔1011内还设置有防流件10112,防流件10112主要来对污水进行阻流,特别是当用户操作推杆主体10在进行前后旋转形成晃动或操作推杆主体10呈倾斜结构时,防流件10112可以有效的来防止污水集聚涌入到气流口10111位置,甚至集聚进入到气流口10111位置,具体地,在防流件10112上设置有阻流部101121,阻流部101121至少构成对污水腔1011的截面的一部分形成遮蔽结构来阻挡污水,且阻流部101121位于污水腔1011的长度方向上的中部以上的区域位置上,当推杆主体10在晃动或倾斜时,此时污水腔1011内的污水会沿污水箱101晃动方向或倾斜的方向进行流动,本方案中的阻流部101121会在污水腔1011的截面上形成阻挡污水流动的效果,防止污水集聚进入到气流口10111位置,可以有效的防止污水进入到气流口10111进而进入到气流器13内出现导致气流器13损坏,提升清洁机1的整体可靠性和安全性。
134.为了提升排污通道10117来更好实现污水的进入,本方案设置排污通道10117安装于防流件10112上,可以在防流件10112上设置限位结构,实现将排污通道10117限位固定在防流件10112上,防止防流件10112的偏移,且防流件10112上还设置有可旋转的摆动件101122,至少排污通道10117的末端对应的位置安装于摆动件101122上使得摆动件101122可带动排污通道10117的末端对应的位置在竖直方向上进行上下摆动,通过摆动件101122来实现将排污通道10117的末端位置稳定地实现压接来靠近污水腔1011的底部位置,同时可以通过摆动件101122来实现排污通道10117的末端可以进行在竖直方向上的位移摆动变化,以便污水更好的来进入到排污通道10117内,实现污水腔1011内的污水更好的通过排污通道10117进行向外排放。
135.具体地,摆动件101122与防流件10112之间设置旋转轴和旋转轴孔来实现摆动件101122可旋转地安装在防流件10112上,进而实现摆动件101122可在防流件10112上进行旋转摆动,以便排污通道10117的末端更好的来靠近污水腔1011的底部位置。
136.针对污水箱101的结构部分,本方案的推杆主体10上设置有安装腔104,安装腔104呈凹陷结构来用于安装污水箱101,污水箱101可拆卸地安装于安装腔104上,可以来实现通过卡扣将污水箱101可拆卸地安装在安装腔104内,且安装腔104内设置有第一补能模块,第一补能模块设置两个间隔的电极片,污水箱101上对应的设置有第二补能模块,第二补能模
块上对应的设置两个电极片,当污水箱101安装在位时即可实现第一补能模块上的两个电极片和第二补能模块上的两个电极片之间来形成对应的接触结构,进而实现对污水箱101的通电效果,其中,主要将触感件10121设置为与第二补能模块相连接,实现第一补能模块、第二补能模块来对触感模块1012上的触感件10121进行供电的结构,以便实现触感模块1012来对污水腔1011内的液面进行感测,当污水箱101安装在位时第一补能模块和第二补能模块对接来构成可进行补能的结构,实现对触感模块1012的补能结构。
137.可选地,在推杆主体10上设置电源单元,电源单元与第一补能模块相连接实现电源单元可以对第一补能模块供电的结构,当污水箱101安装在位时,电源单元通过第一补能模块、第二补能模块来对触感模块1012进行供电。
138.本方案的清洁机1的控制方法,主要通过触感模块1012来对污水腔1011内的污水液面进行检测判断,并及时控制气流器13的工作状态,防止污水被气流器13吸入导致气流器13损坏。
139.清洁机1的控制方法,包括如前所述的清洁机1,清洁机1还包括控制单元12和气流器13,气流器13直接或间接的与气流口10111相连通;控制单元12控制气流器13的启动与停止,控制单元12控制气流器13启动工作则实现将污水吸取进入到污水箱101内收集,控制单元12控制气流器13停止工作则实现停止对污水的收集;
140.控制单元12分别与触感模块1012和气流器13电性相连;
141.还包括以下控制方法:
142.步骤s1:控制单元12检测触感件10121与污水腔1011内的污水连续接触的时间值t,t为非空值,并将时间值t与控制单元12内预设的时间阈值t0进行比较;
143.步骤s2:若检测到的时间值t小于时间阈值t0则控制气流器13停止工作且停止工作的时间为t1,t1小于等于30或60秒,然后控制气流器13重新启动工作并进入步骤s1;
144.步骤s2':若检测到的时间值t大于等于时间阈值t0则控制气流器13停止工作并提示污水已满。
145.在步骤s1中,t为非空值即为t不等于0,其中,主要检测触感件10121与污水连续不断的接触来形成的时间值,可以理解为在时间值t内触感件10121与污水腔1011内的污水为连续不间断的接触状态,以便进一步来将时间值t与时间阈值t0进行比较,进而判断出污水腔1011内的污水液位的真实状态。
146.本方案中,设置t0大于等于10秒,或,设置t1大于等于5秒或设置t1大于等于5秒且小于t0;具体地,可以设置t1大于等于5秒,或设置t1大于等于5秒并设置t1小于t0或小于10秒,若t1的时间较大则需要用户等待的时候相对较长,若t1的时间较小则会导致当前的检测状态未发生变化,因此本方案的t1的取值可以实现在该时间段内,用户通过操作推杆主体10的倾斜角度变小或停止晃动推杆主体10来使得污水箱101内的污水处于正常的状态,可以通过触感件10121来反应污水箱101内真实的污水液面情况。
147.可见,在本方案的控制方法中,可以根据检测触感件10121与污水腔1011内的污水连续接触的时间值t并将时间值t与控制单元12内预设的时间阈值t0进行比较实现进一步控制气流器13的工作状态,以便控制气流器13是持续停止工作来提示用户对污水箱101进行维护倾倒处理还是短暂的停止工作以便触感件10121来对污水腔1011内的污水进行进一步的准确检测判断,当用户操作推杆主体10在晃动或呈倾斜结构时,触感件10121在检测到
污水腔1011内的污水液面时并不一定判断为污水箱101内的污水已满,可以更准确的判断污水箱101内的污水液面,以便用户来操作清洁机1进行对地面的清洁处理,可以有效的防止污水箱101内的污水未满的情况下出现控制气流器13持续停止工作导致用户来频繁对污水箱101进行维护的问题。
148.可选地,控制单元12内预设的时间阈值t0,t0大于等于10秒,则可以理解的时,在t0的时间段内若触感件10121持续接触污水,则表示该状态下污水的液面为真实的状态,即为污水腔1011内的污水已满,此时可以排除污水是在晃动的情况下来构成触感件10121与污水的检测状况,也可以排除污水是在倾斜的情况下来构成触感件10121与污水的检测状况,进而实现控制触感件10121来判断出污水的真实液面情况,本方案来提升触感件10121对污水的液面进行检测的准确性。
149.在步骤s2中,若检测到的时间值t小于时间阈值t0则控制气流器13停止工作且停止工作的时间为t1,t1小于等于30或60秒,然后控制气流器13重新启动工作并进入步骤s1,此过程主要可以判断为用户操作推杆主体10在晃动或呈倾斜结构的状态下,触感件10121与污水进行间歇的接触状态,即为持续接触的时间值t小于时间阈值t0,此时可以理解为污水腔1011内的污水未满,只是在污水晃动或污水倾斜的结构下形成触感件10121与污水的间歇性接触状态,通过控制气流器13停止工作来方便用户在该时间段内停止对推杆主体10旋转倾斜或进行晃动,以便恢复污水腔1011内的污水液位可以稳定或朝向竖直方向来恢复到正常状态,若污水未晃动或未倾斜,此时会形成污水的液面下降使得触感件10121无法接触到污水,在用户等待t1时间后,可以控制气流器13来启动继续执行清洁机1的清洁任务,可以有效的适应用户的适用场景的使用需求。
150.在步骤s2'中,若触感件10121与污水接触的时间值t大于等于时间阈值t0,则可以理解为触感件10121与污水接触的持续时间满足阈值,可以判断为污水腔1011内的污水已满,此时可以提示用户污水已满,需要对污水进行维护处理后清洁机1才可正常来启动气流器13工作进行吸取污水。
151.本方案的控制方法可以有效的来较为准确的检测判断出污水箱101内的真实的污水液面,同时可以有效的来适应用户的使用需求,提升用户的使用体验效果。
152.本方案的清洁机1的控制方法,主要通过触感模块1012来对污水腔1011内的污水液面进行检测判断,并及时控制供水机构的工作状态,防止出现污水不能被有效收集的问题,以及防止出现污水已满的状态下还存在供水机构供给清水的问题。
153.清洁机1的控制方法,包括如前所述的清洁机1,清洁机1还包括控制单元12、供水机构和气流器13,气流器13直接或间接的与气流口10111相连通,控制单元12来控制供水机构的启动和停止,供水机构启动时可以来对地面或滚筒111提供清水,供水机构停止工作时则停止供水,控制单元12控制气流器13的启动与停止,控制单元12控制气流器13启动工作则实现将污水吸取进入到污水箱101内收集,控制单元12控制气流器13停止工作则实现停止对污水的收集。
154.控制单元12分别与触感模块1012、供水机构和气流器13电性相连,以便控制单元12来对供水机构和气流器13进行控制。
155.控制单元12控制气流器13启动工作并进入到以下控制方法:
156.步骤s01:控制供水机构启动工作;
157.步骤s02:控制单元12设定有时间值t的检测周期,时间值t大于等于2秒;
158.在单个检测周期内若检测到触感件10121与污水腔1011内的污水接触则在该检测周期内控制供水机构停止工作;
159.且在单个检测周期内若检测到触感件10121与污水腔1011内的污水连续接触的时间值t1大于等于控制单元12内预设的时间阈值t0则提示污水已满;
160.以及在单个检测周期内若检测到触感件10121与污水腔1011内的污水进行接触的累积接触时间值t2大于等于时间值t的0.5倍则提示污水已满。
161.在步骤s02中,只要在单个检测周期内出现触感件10121接触到污水则控制供水机构停止工作,防止过多的水与滚筒111接触形成污水不能被有效收集;同时,可以为在单个检测周期内检测触感件10121与污水进行接触的持续接触时间,则可以理解为触感件10121与污水接触的持续时间满足阈值,可以判断为污水腔1011内的污水已满,若检测到触感件10121与污水腔1011内的污水连续接触的时间值t1大于等于控制单元12内预设的时间阈值t0,此时可以提示用户污水已满,需要对污水进行维护处理后清洁机1才可正常来启动气流器13工作进行吸取污水;同时,还可以为在单个检测周期内来检测触感件10121接触污水腔1011内的污水的累积接触的时间值t2,在该时间内触感件10121可以为多次间歇的来与污水进行接触,如污水在晃动的情况下来间歇地接触触感件10121,当累积接触的时间值t2大于等于时间值t的0.5倍则提示污水已满,此时可以判断污水腔1011内的污水已经处于将满或已满的状态下才会使得触感件10121与污水的累积接触时间值大于等于时间值t的0.5倍,则直接判断为污水已满,发出污水已满的提示,提示用户需要对污水箱101的污水进行维护后才可来操作清洁机1执行清洁任务。
162.在方法中,还包括步骤s03:若步骤s02中未提示污水已满则进入步骤s01,即为控制供水机构重新启动工作来对地面或滚筒111供水,以便清洁机1来持续在地面上进行清洁处理。
163.可选地,在上述方法中,控制单元12控制气流器13为持续不间断的工作来吸取污水,只有当用户关停清洁机1的工作任务时或清洁机1自动关机时才控制气流器13停止工作,以便气流器13来持续对污水进行吸取收集,有效防止滚筒111上残留较多的污水,且有效防止污水对地面形成二次污染。
164.可选地,可以设置为时间值t大于等于5秒小于等于10秒来构成单个检测周期的时间段,以便更稳定地来对污水进行检测判断。
165.本方案的控制方法可以有效的来控制供水机构的供水状态,防止污水已满的情况下持续供水导致污水无法收集到污水箱101内形成对地面的二次污染的问题发生,以便在供水机构提供的清水下在被滚筒111接触形成的污水可以有效的来被收集到污水箱101内进行收集,在清洁机1的工作过程中实现将形成的污水进行较为有效收集,防止滚筒111上残留较多的污水导致对地面形成二次污染,防止出现污水已满的状态下还存在供水机构供给清水的问题。
166.可以理解是,本方案的清洁机1在用户使用的过程中,因用户会操作推杆主体10来进行旋转或来回的旋转,此时污水箱101会随推杆主体10形成晃动的状态,或者来回晃动的状态,这样导致污水箱101内的污水会在污水腔1011内晃动,此时会存在污水在某个时间点上接触到触感模块1012,使得触感件10121被触发,但是此时污水箱101内的污水并未盛放
满,因此此时触感件10121检测到的污水液面并不准确;同时,当用户在操作推杆主体10呈相对地拖主体11呈较大的倾斜角度时,此时污水箱101内的污水会随推杆主体10的倾斜而倾斜,此时污水也较为容易使得污水接触触感件10121导致触感件10121被触发;本方案的控制方法可以有效的来判断污水箱101内的液面是否已满,并来及时控制气流器13的工作状态,同时可以有效的来防止污水进入到气流口10111或进入到气流器13导致气流器13损坏,提升清洁机1工作过程的稳定性,以及提升触感模块1012来检测污水液面的稳定性。
167.本方案可以有效的解决当污水箱101内的污水液面未满或污水液面较低时导致出现触感件10121被触发后用户停止清洁机1不再工作的问题,防止出现污水箱101内的污水液面未满或污水液面较低时对用户发出污水箱101已满或污水箱101需要维护的问题,提升对污水箱101内的污水液面判断检测的准确性和真实性,防止出现触感件10121对污水液面误判后引起用户操作体验效果差的问题。
168.工作原理:本方案的清洁机1主要来实现对地面的清洁处理,清洁机1设置地拖主体11和推杆主体10来构成手持式的清洁机1结构,推杆主体10上设置污水箱101,污水箱101用于来收集盛放污水,具体地设置滚筒111,滚筒111在拖地清洁过程中形成污水,然后通过气流器13将污水吸取到污水箱101内收集,本方案通过设置触感模块1012和气流口10111的结构位置限定来实现将推杆主体10相对地拖主体11呈倾斜结构时可构成污水腔1011内的污水液面至少淹没触感件10121的一部分且污水腔1011内的污水液面不淹没气流口10111,可以有效的防止因污水箱101呈倾斜结构时出现污水淹没气流口10111,甚至出现污水进入气流口10111内出现进入到气流器13内导致气流器13损坏,通过触感模块1012来实现对污水的液面进行检测判断,并结合推杆主体10的倾斜角度来结合设置触感模块1012与气流口10111的位置关系及限定结构,实现触感模块1012来稳定的预先检测污水的液面是否会引起淹没气流口10111,进而提前控制气流器13的工作状态,防止污水淹没气流口10111,提升清洁机1整体的稳定性和安全性,以及污水箱101来收集污水的可靠性。
169.本领域的普通技术人员可以理解,上述各实施方式是实现本发明的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本发明的精神和范围,均在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。