1.本发明属于微距拍摄技术领域,具体涉及一种微距摄影设备及方法。
背景技术:
2.微距摄影指照相机通过镜头的光学能力,拍摄与实际物体等大或比实际物体稍小的图像。用微距拍摄可以把很普通的场景拍成戏剧性的场面,微距特别擅长表现花鸟鱼虫等细小的东西,对细节可以充分展示,而且也可以随心所欲地表现自己在选题、构图、用光方面的创意,不像拍摄风光、人物、民俗文化等题材,要受很多条件的制约。
3.众所周知,对焦是拍摄过程中至关重要的步骤,对于微距摄影来说也是如此,因为微距拍摄的都是空间距离尺度极小的景,画面的景深极浅,清楚的范围很窄,此时对于对焦的焦点平面的调整需要十分的精确。特别是对运动中的目标物体进行微距拍摄时,相较于静止的物体而言,就需要反复的对运动中的目标拍摄物体进行对焦才能获取最好的拍摄效果,这样增加了对运动中的目标拍摄物体进行微距拍摄的难度,且调好的焦点容易随着目标拍摄物体的运动而模糊,难以获取最佳拍摄的效果。
技术实现要素:
4.针对上述不足,本发明公开了一种微距摄影设备及方法,适合对静止或动态的物体进行微距拍摄,并且能够获取最佳的拍摄效果。
5.本发明是采用如下技术方案实现的:一种微距摄影设备,其包括云台组件、cmos镜头组件、支架;所述云台组件包括底座、可360度转动的云台、云台控制系统,所述底座内设有电机,所述电机的一侧设有丝杠,所述丝杠的一端与所述电机的转轴连接,所述丝杠的另一端通过轴承与底座连接,所述丝杠上设有相互配合的丝杠螺母,所述丝杠螺母的顶部与所述云台的底部连接;所述底座的底部与支架连接,所述控制系统安装在底座的一侧面上,所述云台控制系统分别与电机和云台连接,用于控制电机和云台工作;所述云台的两侧设有补光装置,所述补光装置包括固定块、弧形板,所述固定块的一端与云台连接,所述固定块的另一端设有万向头,所述万向头上设有固定夹,所述固定夹用于固定所述弧形板,所述弧形板的上边沿和下边沿处均布有若干个led灯;所述cmos镜头组件安装在所述云台上,所述cmos镜头组件包括相互配合的光圈和光圈自动调节设备、cmos图像传感器、图像处理系统、镜头中控系统、镜头基座;所述图像处理系统包括数据存储模块、数据接收模块、数据发送模块、数据处理模块、卷积神经网络模块;所述数据处理模块分别与数据接收模块、数据发送模块、卷积神经网络模块和数据存储模块连接,所述数据接收模块与所述数据存储模块连接;所述数据存储模块用于存储所述图像处理系统接收和处理的数据信息;所述数据接收模块用于接收cmos图像传感器获得的图像信息,并将其转换成数据信息传输至数据处理模块或是数据处理模块;所述数据发送模块用于将所述图像处理系统处理得到的数据信息发送至外部设备;所述数据处理模块用
于处理来自数据接收模块的数据信息,并且将所处理的数据信息反馈至卷积神经网络模块进行机器学习训练;所述镜头中控系统与所述图像处理系统相邻布置,所述镜头中控系统分别与光圈自动调节设备、图像处理系统和云台组件中的云台控制系统连接,所述镜头中控系统用于收集光学参数,并且分别与图像处理系统和云台控制系统进行数据信息交互,以此控制光圈自动调节设备和云台控制系统配合进行对焦工作;所述镜头基座用于固定光圈、光圈自动调节设备、cmos图像传感器和图像处理系统;所述镜头基座的底部与所述的云台连接。
6.进一步的,所述微距摄影设备设有远程控制器,所述远程控制器通过无线通信方式与所述云台控制系统和镜头中控系统连接。操作人员可以通过所述远程控制器向所述云台控制系统或镜头中控系统发送指令,进而实现微距摄影设备的远程设置和操作。
7.进一步的,所述外部设备包括但不限于智能手机、平板电脑或显示器。
8.上述微距摄影设备的使用方法,根据待拍照物体的位置布置上述微距摄影设备,并且使用微距摄影设备的支架进行固定,接着操作人员向镜头中控系统输入预设的光学参数,然后根据预设的光学参数,云台控制系统控制电机转动丝杠,从而带动丝杠上的丝杠螺母前后移动来调节云台与待拍照物体的距离,同时云台控制系统控制云台转动,从而调节云台上的镜头组件与待拍照物体的角度;如果需要补光时,可以将弧形板固定在在云台两侧的固定块上,并且转动万向头来调整弧形板位置,使得弧形板上的led灯与待拍照物体相对,然后将led灯与云台控制系统连接,通过云台控制系统来控制弧形板上任意一个led灯的来为待拍照物体补光;使用cmos镜头组件对待拍照物体进行预拍照,然后cmos镜头组件中的图像处理模块对预拍照得到的图像数据进行处理,镜头中控系统根据处理得到的数据信息对预设的光学参数进行修改,然后向云台控制系统和光圈自动调节设备发送指令进行调整,调整完成后再次对待拍照进行拍摄,多次重复上述调整过程,最后获得最佳的效果图片。
9.一种用于动态物体的微距摄影方法,其包括以下步骤:(1)根据待拍照物体的位置布置上述微距摄影设备,然后向镜头中控系统输入预设的光学参数,对待拍照物体进行预拍照,图像处理系统对接收到的图像信息进行处理,随机选择若干个区域进行标记,读取每个区域的坐标数据(an,bn),其中n为自然数;然后计算各个区域之间的距离数据并且存储在数据存储模块中;所述区域内由10~100个相邻的像素点组成;(2)通过镜头中控系统控制,对待拍照物体进行连续拍照3次以上,图像处理系统随机抽取其中若干张,并且按照拍照顺序对每张图片进行处理,所抽取的图片中包括第一张图片和最后一张图片,根据步骤(1)中选择的区域的像素点信息,在图片上重新定位,读取该区域新的坐标数据(an,bn),并且将其与原有坐标数据进行比对,计算得到坐标数据的绝对差值(|xn|,|yn|),其中xn=a
n-an,yn=b
n-bn,将所得到的数据信息对应存储至数据存储模块中,然后按照相同步骤处理抽取的每一张图片;(3)当某一个区域的|xn|或|yn|超过0.1时,判定该区域存在移动,在被判定移动的所有区域中,按照|xn|和|yn|之和由大到小对上述区域进行排序,读取排在前三位的区域并计算三个区域组成的区域的中心点,将每张图中的中心点的坐标都标记在预拍照得到的图片内,然后分析中心点的移动趋势,并计算中心点每次移动的距离和移动距离的平均值,根
据该中心点在最后一张图片的坐标数据结合移动距离的平均值得到中心点再次移动的坐标,同时将图像处理系统接收的数据信息和处理得到的数据信息一起反馈至卷积神经网络模块进行机器学习训练,用于辅助分析中心点的移动趋势;(4)镜头中控系统根据步骤(3)得到的中心点的坐标数据,以该中心点作为对焦的中心点进行对焦操作,然后再进行连续拍照,重复进行步骤(2)~(4)拍摄得到一组动态物体的微距图片。
10.进一步的,所述光学参数包括但不限于对焦范围、光圈范围、曝光水平、焦距范围和快门速度。
11.进一步的,步骤(2)中对待拍照物体进行连续拍照3次以上,整个拍照的时间为5~15s。
12.进一步的,步骤(3)中,采用三角定位算法计算得到中心点的坐标数据。
13.本技术方案与现有技术相比较具有以下有益效果:1、本发明所述的微距摄影设备结构简单,操作方便,适合对静止或动态的物体进行微距拍摄,并且能够获取最佳的拍摄效果,其中在载有cmos镜头组件的云台两侧设置补光装置,并且在补光装置结构中将若干个led灯均匀分布在一定弯曲度的弧形板,增大了led灯的照射面积,可以覆盖整个拍摄场景,增加补光效果,而且还通过云台控制系统来控制某一个或几个led灯开启,实现对局部某一特定位置的补光,有利于获得最佳的拍摄效果。
14.2、本发明在图像处理系统中设置了卷积神经网络模块,通过将图像处理数据以及收集的各种光学参数对应的反馈至卷积神经网络模块进行深度学习,获得应用不同拍摄场景或环境的数据模型,有利于辅助图像处理系统快速、有效的分析处理图像数据,进而指导光圈自动调节设备、镜头中控系统和云台控制系统自动进行对焦、补光等操作,以此获得清晰的图像照片。
15.3、本发明应用在动态物体拍摄时,通过对第一次连续抓拍的图片进行像素区域选定,通过对每张图片中选定的像素区域的比对,分析预测移动物体的移动趋势和移动位置,然后重新进行对焦等操作后进行下一次抓拍,重复多次进行抓拍步骤,以此能够清晰地抓拍到移动物体在运动过程中的多个瞬间图片。
附图说明
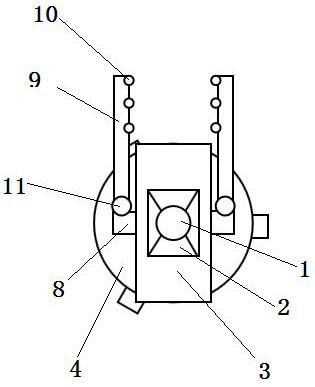
16.图1是实施例1中所述微距摄影设备的俯视图。
17.图2是实施例1中所述微距摄影设备的内部结构示意图。
18.附图标记:1-cmos镜头组件,2-云台,3-底座,4-支架,5-电机,6-丝杠,7-丝杠螺母,8-固定块,9-弧形板,10-led灯,11-万向头。
具体实施方式
19.以下通过实施例进一步说明本发明,但不作为对本发明的限制。下列实施例中未注明的具体实验条件和方法,所采用的技术手段通常为本领域技术人员所熟知的常规手段。
20.实施例1:
如图1和图2所示,一种微距摄影设备,其包括云台组件、cmos镜头组件1、支架4;所述云台组件包括底座3、可360度转动的云台2、云台控制系统,所述底座3内设有电机5,所述电机5的一侧设有丝杠6,所述丝杠6的一端与所述电机5的转轴连接,所述丝杠6的另一端通过轴承与底座3连接,所述丝杠6上设有相互配合的丝杠螺母7,所述丝杠螺母7的顶部与所述云台2的底部连接;所述底座3的底部与支架4连接,所述控制系统安装在底座3的一侧面上,所述云台控制系统分别与电机5和云台2连接,用于控制电机5和云台2工作;所述云台2的两侧设有补光装置,所述补光装置包括固定块8、弧形板9,所述固定块8的一端与底座3连接,所述固定块8的另一端设有万向头11,所述万向头11上设有固定夹,所述固定夹用于固定所述弧形板9,所述弧形板9的上边沿和下边沿处均布有3个led灯10;所述cmos镜头组件1安装在所述云台2上,所述cmos镜头组件1包括相互配合的光圈和光圈自动调节设备、cmos图像传感器、图像处理系统、镜头中控系统、镜头基座;所述图像处理系统包括数据存储模块、数据接收模块、数据发送模块、数据处理模块、卷积神经网络模块;所述数据处理模块分别与数据接收模块、数据发送模块、卷积神经网络模块和数据存储模块连接,所述数据接收模块与所述数据存储模块连接;所述数据存储模块用于存储所述图像处理系统接收和处理的数据信息;所述数据接收模块用于接收cmos图像传感器获得的图像信息,并将其转换成数据信息传输至数据处理模块或是数据处理模块;所述数据发送模块用于将所述图像处理系统处理得到的数据信息发送至外部设备;所述数据处理模块用于处理来自数据接收模块的数据信息,并且将所处理的数据信息反馈至卷积神经网络模块进行机器学习训练;所述镜头中控系统与所述图像处理系统相邻布置,所述镜头中控系统分别与光圈自动调节设备、图像处理系统和云台组件中的云台控制系统连接,所述镜头中控系统用于收集光学参数,并且分别与图像处理系统和云台控制系统进行数据信息交互,以此控制光圈自动调节设备和云台控制系统配合进行对焦工作;所述微距摄影设备设有远程控制器,所述远程控制器通过无线通信方式与所述云台控制系统和镜头中控系统连接;操作人员可以通过所述远程控制器向所述云台控制系统或镜头中控系统发送指令,进而实现微距摄影设备的远程设置和操作;所述镜头基座用于固定光圈、光圈自动调节设备、cmos图像传感器和图像处理系统;所述镜头基座的底部与所述的云台2连接;所述外部设备包括但不限于智能手机、平板电脑或显示器。
21.本实施例所述微距摄影设备的使用方法,根据待拍照物体的位置布置上述微距摄影设备,并且使用微距摄影设备的支架4进行固定,接着操作人员向镜头中控系统输入预设的光学参数,然后根据预设的光学参数,云台控制系统控制电机5转动丝杠6,从而带动丝杠6上的丝杠螺母7前后移动来调节云台2与待拍照物体的距离,同时云台控制系统控制云台2转动,从而调节云台2上的镜头组件与待拍照物体的角度;如果需要补光时,可以将弧形板9固定在在云台2两侧的固定块8上,并且转动万向头11来调整弧形板9位置,使得弧形板9上的led灯10与待拍照物体相对,然后将led灯10与云台控制系统连接,通过云台控制系统来控制弧形板9上任意一个led灯10的来为待拍照物体补光;使用cmos镜头组件1对待拍照物体进行预拍照,然后cmos镜头组件1中的图像处理模块对预拍照得到的图像数据进行处理,镜头中控系统根据处理得到的数据信息对预设的光学参数进行修改,然后向云台控制系统和光圈自动调节设备发送指令进行调整,调整完成后再次对待拍照进行拍摄,多次重复上述调整过程,最后获得最佳的效果图片。
22.实施例2:一种用于动态物体的微距摄影方法,如用于拍摄物体由静止到运动变化的短暂时间的清晰图片,其包括以下步骤:(1)根据待拍照物体的位置布置实施例1中所述的微距摄影设备,然后向镜头中控系统输入预设的光学参数,对待拍照物体进行预拍照,图像处理系统对接收到的图像信息进行处理,随机选择5个区域进行标记,读取每个区域的坐标数据(an,bn),其中n为自然数;然后计算各个区域之间的距离数据并且存储在数据存储模块中;所述区域内由10~100个相邻的像素点组成;所述光学参数包括但不限于对焦范围、光圈范围、曝光水平、焦距范围和快门速度;(2)通过镜头中控系统控制,对待拍照物体进行连续拍照10次,整个拍照的时间为5~15s,图像处理系统随机抽取其中5张,并且按照拍照顺序对每张图片进行处理,所抽取的图片中包括第一张图片和最后一张图片,根据步骤(1)中选择的区域的像素点信息,在图片上重新定位,读取该区域新的坐标数据(an,bn),并且将其与原有坐标数据进行比对,计算得到坐标数据的绝对差值(|xn|,|yn|),其中xn=a
n-an,yn=b
n-bn,将所得到的数据信息对应存储至数据存储模块中,然后按照相同步骤处理抽取的每一张图片;(3)当某一个区域的|xn|或|yn|超过0.1时,判定该区域存在移动,在被判定移动的所有区域中,按照|xn|和|yn|之和由大到小对上述区域进行排序,读取排在前三位的区域并采用三角定位算法计算三个区域组成的区域的中心点,将每张图中的中心点的坐标都标记在预拍照得到的图片内,然后分析中心点的移动趋势,并计算中心点每次移动的距离和移动距离的平均值(如根据物体的运动特点,从直线运动轨迹模型或曲线轨迹模型等选择适合的运动轨迹模型,代入中心点每次移动的距离和移动距离的平均值等数据信息进行分析得到最有可能符合中心点移动的运动轨迹模型,再应用该模型进行分析预测,可以通过卷积神经网络辅助分析得到最有可能的运动轨迹模型),根据该中心点在最后一张图片的坐标数据结合移动距离的平均值得到中心点再次移动的坐标,同时将图像处理系统接收的数据信息和处理得到的数据信息一起反馈至卷积神经网络模块进行机器学习训练,用于辅助分析中心点的移动趋势;(4)镜头中控系统根据步骤(3)得到的中心点的坐标数据,以该中心点作为对焦的中心点进行对焦操作,然后再进行连续拍照,重复进行步骤(2)~(4)拍摄得到一组动态物体的微距图片。
23.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。