技术特征:
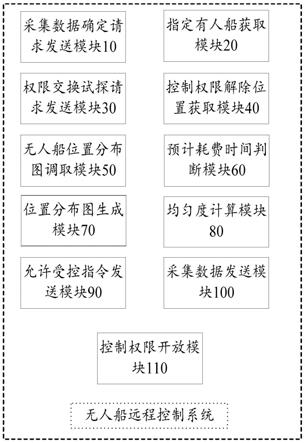
1.一种无人船远程控制系统,其特征在于,包括:采集数据确定请求发送模块10,用于指示多艘第一无人船分别沿预定的多条第一航线航行,以通过预设于第一无人船上的传感器进行预设的沿航线数据采集任务,并在航行过程中,分别向预设通信范围内的所有有人船发送采集数据确定请求;指定有人船获取模块20,用于指示多艘第一无人船分别接收有人船的返回信息,并分别根据返回信息选出一艘指定有人船,从而得到与多艘第一无人船分别对应的多艘指定有人船;其中,返回信息至少包括有人船的行驶航线;指定有人船行驶过的第二航线,与对应的第一无人船的第一航线部分重合,并且指定有人船存储有在航行过程中进行实时数据采集处理得到的采集数据;权限交换试探请求发送模块30,用于指示多艘第一无人船分别向对应的指定有人船发送权限交换试探请求,以要求指定有人船返回将行驶的第三航线和控制权限解除位置,从而分别得到与所述多艘指定有人船对应的多条第三航线和多个控制权限解除位置;其中,控制权限解除位置为第三航线上的一个位置;控制权限解除位置获取模块40,用于指示多艘第一无人船分别获取所述多艘指定有人船对应发送的第三航线和控制权限解除位置,并将第三航线和控制权限解除位置均发送至预设的服务器;其中,服务器仅与无人船信号连接;无人船位置分布图调取模块50,用于指示服务器调取当前的一号无人船位置分布图,并从所述一号无人船位置分布图中选出多艘第二无人船,以暂定多艘第二无人船分别执行多个剩余数据采集任务;其中,剩余数据采集任务指对第一航线中未进行数据采集的剩余航线进行数据采集的任务;多艘第二无人船的数量与多艘第一无人船的数量相同;预计耗费时间判断模块60,用于指示服务器计算出多艘第二无人船分别执行多个剩余数据采集任务的多个预计耗费时间,并判断所述多个预计耗费时间,是否均小于对应的第一无人船继续沿预定的第一航线航行进行数据采集任务的耗费时间;位置分布图生成模块70,用于指示若所述多个预计耗费时间,均小于对应的第一无人船继续沿预定的第一航线航行进行数据采集任务的耗费时间,则服务器根据预设的位置分布图生成方法,生成预定时间后的二号无人船位置分布图;均匀度计算模块80,用于指示服务器根据预设的均匀度计算方法,对所述一号无人船位置分布图与所述二号无人船位置分布图进行均匀度计算处理,以得到一号均匀度值和二号均匀度值,并判断一号均匀度值与二号均匀度值的差值是否小于预设的差值阈值;允许受控指令发送模块90,用于指示若一号均匀度值与二号均匀度值的差值小于预设的差值阈值,则服务器向所有的第一无人船发送允许受控指令,同时向所有的第二无人船发送剩余数据采集任务执行指令;采集数据发送模块100,用于指示多艘第一无人船接收对应的指定有人船发送的采集数据,并将采集数据发送至服务器;控制权限开放模块110,用于指示多艘第一无人船向对应的指定有人船开放控制权限,并且在开放控制权限期间,多艘第一无人船断开与服务器的通信连接;其中,控制权限由当前时间开始,直至第一无人船到达对应的控制权限解除位置结束。2.根据权利要求1所述的无人船远程控制系统,其特征在于,所述采集数据确定请求发送模块10,包括:
剩余航线长度获取子模块,用于指示多艘第一无人船分别沿预定的多条第一航线航行,以通过预设于第一无人船上的传感器进行预设的沿航线数据采集任务,并分别获取对应的多条第一航线中未完成的多个剩余航线长度;剩余航线长度判断子模块,用于指示多艘第一无人船分别判断多个剩余航线长度是否均大于预设的长度阈值;通信半径计算子模块,用于指示若多个剩余航线长度均大于预设的长度阈值,则多艘第一无人船调取预设的相同的比例参数,并分别根据公式:通信半径=min(剩余航线长度
×
比例参数,d),计算出对应于多个剩余航线长度的多个通信半径;其中,d为预设的半径阈值;通信范围生成子模块,用于指示多艘第一无人船根据所述多个通信半径,对应生成多个通信范围;采集数据确定请求发送子模块,用于指示多艘第一无人船分别向对应的多个通信范围内的所有有人船发送采集数据确定请求。3.根据权利要求1所述的无人船远程控制系统,其特征在于,所述指定有人船获取模块20,包括:行驶航线提取子模块,用于指示多艘第一无人船分别接收有人船的返回信息,并从返回信息中提取出多条有人船行驶过的行驶航线,从而分别得到多个行驶航线集合;第一筛选子模块,用于指示多艘第一无人船根据行驶航线与对应的第一无人船的第一航线部分重合的第一筛选规则,分别对多个行驶航线集合进行筛选处理,以得到多个待选行驶航线集合;第二筛选子模块,用于指示多艘第一无人船根据重合航线最长的第二筛选规则,分别对多个待选行驶航线集合进行筛选处理,以筛选出多条指定航线;指定有人船获取子模块,用于指示多艘第一无人船将指定航线对应的有人船记为多艘指定有人船,从而得到与多艘第一无人船分别对应的多艘指定有人船。4.根据权利要求1所述的无人船远程控制系统,其特征在于,所述无人船位置分布图调取模块50,包括:空闲状态设置子模块,用于指示服务器调取当前的一号无人船位置分布图,并将所述一号无人船位置分布图中,所有的第一无人船对应的位置暂时设置为空闲状态;多个终点获取子模块,用于指示服务器分别获取所述多个剩余数据采集任务对应的剩余航线的多个终点;多个终点判断子模块,用于指示服务器判断在多个终点的预设距离内是否存在空闲状态的无人船;无人船判断子模块,用于指示若在多个终点的预设距离内均存在空闲状态的无人船,则服务器分别判断所述空闲状态的无人船是否为第一无人船;第二无人船选取子模块,用于指示若所述空闲状态的无人船均不为第一无人船,则服务器将所述空闲状态的无人船分别记为多艘第二无人船,并暂定多艘第二无人船分别执行多个剩余数据采集任务;忙碌状态设置子模块,用于指示服务器将所有的第一无人船对应的位置设置为忙碌状态。
5.根据权利要求4所述的无人船远程控制系统,其特征在于,所述无人船位置分布图调取模块50,包括:权限交换禁止指令发送子模块,用于指示若所述空闲状态的无人船中包括第一无人船,则服务器向所述空闲状态的无人船中的第一无人船记为第三无人船,并向第三无人船发送权限交换禁止指令、剩余数据采集任务执行指令与权限交换凭证;其中,有人船能够通过权限交换凭证获取除第三无人船之外的其他无人船的控制权限;权限交换凭证发送子模块,用于指示第三无人船向对应的指定有人船发送所述权限交换凭证,并接收对应的指定有人船发送的采集数据,并将采集数据发送至服务器;剩余数据采集任务执行子模块,用于指示第三无人船执行剩余数据采集任务;其中,第三无人船执行的剩余数据采集任务的起点为一个所述终点。6.一种无人船远程控制方法,其特征在于,包括:s1、多艘第一无人船分别沿预定的多条第一航线航行,以通过预设于第一无人船上的传感器进行预设的沿航线数据采集任务,并在航行过程中,分别向预设通信范围内的所有有人船发送采集数据确定请求;s2、多艘第一无人船分别接收有人船的返回信息,并分别根据返回信息选出一艘指定有人船,从而得到与多艘第一无人船分别对应的多艘指定有人船;其中,返回信息至少包括有人船的行驶航线;指定有人船行驶过的第二航线,与对应的第一无人船的第一航线部分重合,并且指定有人船存储有在航行过程中进行实时数据采集处理得到的采集数据;s3、多艘第一无人船分别向对应的指定有人船发送权限交换试探请求,以要求指定有人船返回将行驶的第三航线和控制权限解除位置,从而分别得到与所述多艘指定有人船对应的多条第三航线和多个控制权限解除位置;其中,控制权限解除位置为第三航线上的一个位置;s4、多艘第一无人船分别获取所述多艘指定有人船对应发送的第三航线和控制权限解除位置,并将第三航线和控制权限解除位置均发送至预设的服务器;其中,服务器仅与无人船信号连接;s5、服务器调取当前的一号无人船位置分布图,并从所述一号无人船位置分布图中选出多艘第二无人船,以暂定多艘第二无人船分别执行多个剩余数据采集任务;其中,剩余数据采集任务指对第一航线中未进行数据采集的剩余航线进行数据采集的任务;多艘第二无人船的数量与多艘第一无人船的数量相同;s6、服务器计算出多艘第二无人船分别执行多个剩余数据采集任务的多个预计耗费时间,并判断所述多个预计耗费时间,是否均小于对应的第一无人船继续沿预定的第一航线航行进行数据采集任务的耗费时间;s7、若所述多个预计耗费时间,均小于对应的第一无人船继续沿预定的第一航线航行进行数据采集任务的耗费时间,则服务器根据预设的位置分布图生成方法,生成预定时间后的二号无人船位置分布图;s8、服务器根据预设的均匀度计算方法,对所述一号无人船位置分布图与所述二号无人船位置分布图进行均匀度计算处理,以得到一号均匀度值和二号均匀度值,并判断一号均匀度值与二号均匀度值的差值是否小于预设的差值阈值;s9、若一号均匀度值与二号均匀度值的差值小于预设的差值阈值,则服务器向所有的
第一无人船发送允许受控指令,同时向所有的第二无人船发送剩余数据采集任务执行指令;s10、多艘第一无人船接收对应的指定有人船发送的采集数据,并将采集数据发送至服务器;s11、多艘第一无人船向对应的指定有人船开放控制权限,并且在开放控制权限期间,多艘第一无人船断开与服务器的通信连接;其中,控制权限由当前时间开始,直至第一无人船到达对应的控制权限解除位置结束。7.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求6所述方法的步骤。8.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求6所述的方法的步骤。
技术总结
本申请涉及一种无人船远程控制方系统,发送采集数据确定请求;得到多艘指定有人船;发送权限交换试探请求;获取第三航线和控制权限解除位置,并发送至服务器;调取当前的一号无人船位置分布图,选出多艘第二无人船;多个预计耗费时间;若多个预计耗费时间,均小于进行数据采集任务的耗费时间,则生成二号无人船位置分布图;得到一号均匀度值和二号均匀度值;若差值小于差值阈值,则发送允许受控指令,同时发送剩余数据采集任务执行指令;接收采集数据,并发送至服务器;开放控制权限,并且在开放控制权限期间,多艘第一无人船断开与服务器的通信连接,实现了全局无人船远程控制的优化,避免了无人船整体的时间浪费与数据浪费。避免了无人船整体的时间浪费与数据浪费。避免了无人船整体的时间浪费与数据浪费。
技术研发人员:莫敏玲 王刚 何志云 王景朗
受保护的技术使用者:广东蓝鲲海洋科技有限公司
技术研发日:2021.12.24
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。