技术特征:
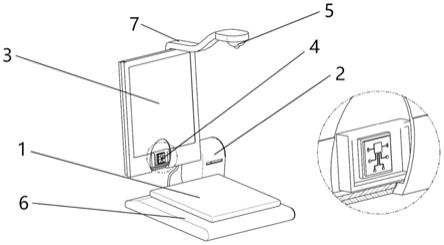
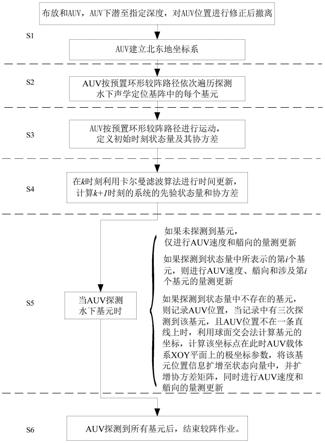
1.一种电子秤,其特征在于,所述电子秤包括:用于承托物体的托盘、用于对物体进行识别分析的控制机以及用于与用户进行信息交互的触控屏;所述控制机设置在所述托盘的侧边,所述触控屏设置在所述控制器的侧边且所述触控屏的正面朝向所述托盘的顶面;所述触控屏的底边设有第一雷达组件,且所述第一雷达组件朝向所述托盘的顶面,所述触控屏的顶边设有摄像头,且所述摄像头朝向所述托盘的顶面。2.根据权利要求1所述的电子秤,其特征在于,所述控制机的内部设有第二雷达组件,且所述第二雷达组件朝向所述托盘的顶面。3.根据权利要求1所述的电子秤,其特征在于,所述触控屏的顶边设有延长杆,所述摄像头设置在所述延长杆上,以使所述摄像头设置在所述托盘的顶面并朝向所述托盘的顶面。4.根据权利要求1所述的电子秤,其特征在于,还包括用于承托所述托盘的秤体;所述秤体设置在所述托盘底部。5.一种结合雷达和摄像头的物体识别方法,其特征在于,所述方法适用于如权利要求1-4任意一项所述的电子秤,所述方法包括:分别获取通过雷达采集的雷达检测数据以及通过摄像头采集的物体图像数据;利用预设的机器学习分类算法确定所述雷达检测数据对应的雷达识别结果,以及利用预设的图像识别算法确定所述物体图像数据对应的图像识别结果;采用卡尔曼滤波方式融合所述雷达识别结果与所述图像识别结果得到物体识别结果。6.根据权利要求5所述的结合雷达和摄像头的物体识别方法,其特征在于,所述利用预设的机器学习分类算法确定所述雷达检测数据对应的雷达识别结果,包括:将所述雷达检测数据转换生成雷达图像;将所述雷达图像输入至基于卷积神经网络的机器学习算法中得到雷达识别结果。7.根据权利要求6所述的结合雷达和摄像头的物体识别方法,其特征在于,所述雷达检测数据包括多个通道的雷达中频原始数据;所述将所述雷达检测数据转换生成雷达图像,包括:将每个通道在一个调频周期内的雷达中频原始数据按纵向水平排列,得到二维的雷达采样数据矩阵;分别对所述雷达采样数据矩阵的每一行和每一列进行傅立叶变换得到具有二维的距离角度的雷达图像。8.根据权利要求6所述的结合雷达和摄像头的物体识别方法,其特征在于,所述方法还包括:标签所述图像识别结果得到标签图像;利用所述标签图像对所述基于卷积神经网络的机器学习算法进行模型优化训练。9.根据权利要求6-8任意一项所述的结合雷达和摄像头的物体识别方法,其特征在于,在所述采用卡尔曼滤波方式融合所述雷达识别结果与所述图像识别结果得到物体识别结果的步骤后,所述方法还包括:展示所述物体识别结果,并当所述物体识别结果与实际物体不符时,获取用户输入的纠正数据;
采用所述纠正数据对所述雷达检测数据二次识别,得到并存储二次雷达识别结果。10.一种结合雷达和摄像头的物体识别装置,其特征在于,所述装置适用于如权利要求1-4任意一项所述的电子秤,所述装置包括:获取模块,用于分别获取通过雷达采集的雷达检测数据以及通过摄像头采集的物体图像数据;分别识别模块,用于利用预设的机器学习分类算法确定所述雷达检测数据对应的雷达识别结果,以及利用预设的图像识别算法确定所述物体图像数据对应的图像识别结果;融合识别模块,用于采用卡尔曼滤波方式融合所述雷达识别结果与所述图像识别结果得到物体识别结果。
技术总结
本发明公开了一种结合雷达和摄像头的物体识别方法、装置及智能电子秤,所述电子秤包括:用于承托物体的托盘、用于对物体进行识别分析的控制机以及用于与用户进行信息交互的触控屏;所述控制机设置在所述托盘的侧边,所述触控屏设置在所述控制器的侧边且所述触控屏的正面朝向所述托盘的顶面;所述触控屏的底边设有第一雷达组件,且所述第一雷达组件朝向所述托盘的顶面,所述触控屏的顶边设有摄像头,且所述摄像头朝向所述托盘的顶面。且所述摄像头朝向所述托盘的顶面。且所述摄像头朝向所述托盘的顶面。
技术研发人员:刘建伟 温姣
受保护的技术使用者:深圳市博悠半导体科技有限公司
技术研发日:2021.12.07
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。